


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S200 PN进行速度控制的三种方法

发布时间:2025年03月28日
- 1
- 3235
主要介绍TO速度轴、FB285、报文字控制三种速度控制S200伺服驱动器的方式
S200 PN进行速度控制的三种方法
S200 PN伺服驱动器进行速度控制,实现方法主要有以下三种:
• 方法一:在S7-1500PLC中,组态速度轴工艺对象,S200 PN伺服驱动器可以使用1、2、3、5、102、105等报文,使用MC_Power、MC_MoveVelocity等PLC Open标准功能块进行控制,但此方法对于PLC运算负荷大,且S7-1200 PLC不支持组态速度轴。
• 方法二:PLC通过SINA_SPEED( FB285 )功能块对S200 PN进行速度控制,S200使用1号标准报文,这种方式不需要PLC组态工艺对象,PLC的运算负担较小。
• 方法三:S200 PN 伺服驱动器使用1号或2号标准报文(推荐),不使用任何专用程序块,直接利用报文的控制字和状态字通过编程进行控制,使用这种方式需要对报文结构比较熟悉。
方法一 :组态速度轴 TO_SpeedAxis
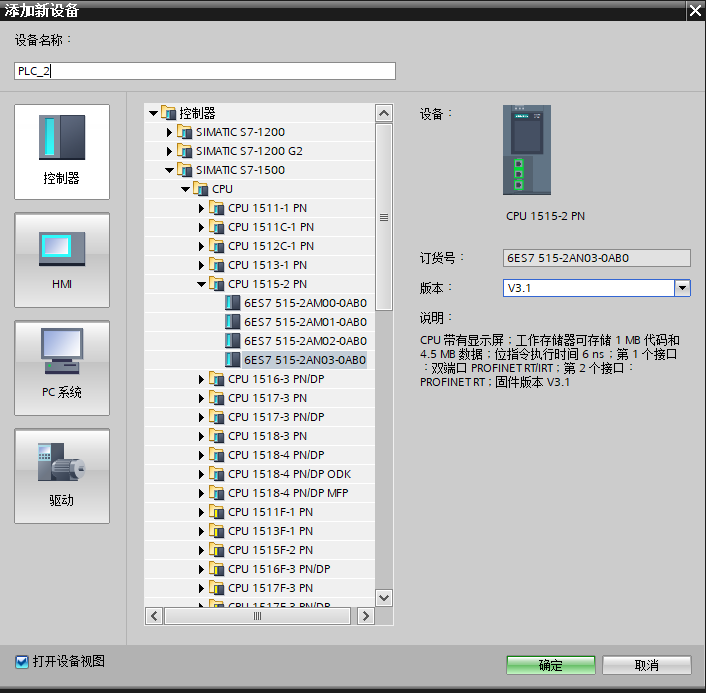
1、创建项目后,添加新设备S7-1500 PLC和SINAMICS S200 PN伺服驱动。
注意:此处添加的S7-1500 PLC与S200 PN伺服驱动的订货号、固件版本,必须与实际使用的相一致。

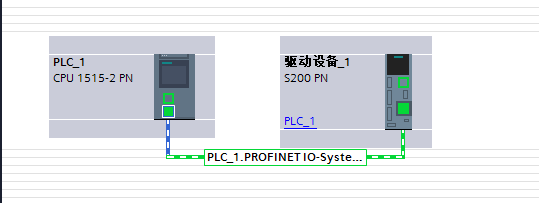
2、网络视图中,建立S200 PN与PLC的网络连接,并分别设置S7-1500及S200 PN的IP地址及设备名称。
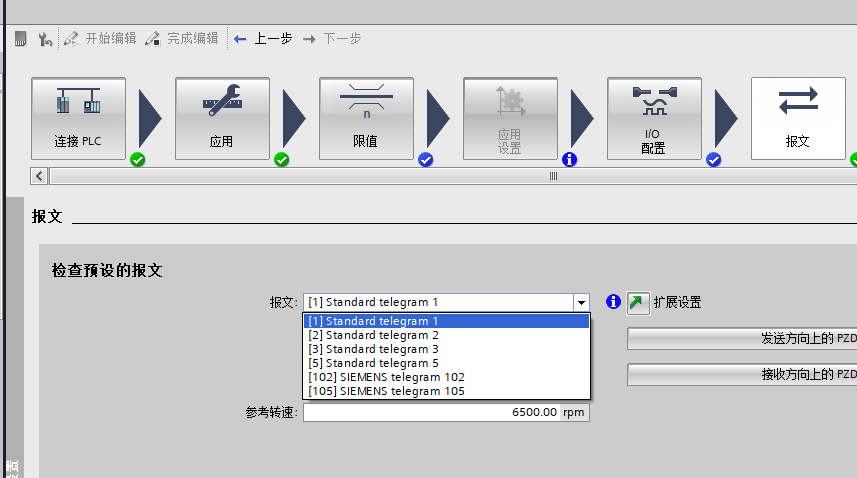
3、在S200 PN的引导式快速设置中,“应用”中“选择驱动的应用”设置为“转速控制”。
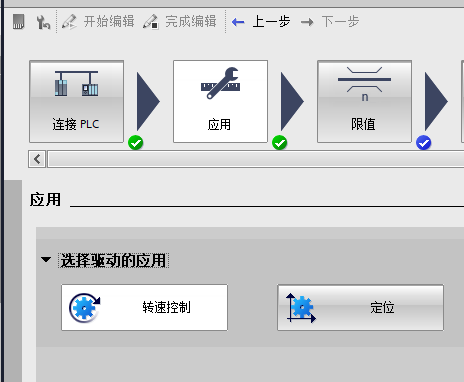
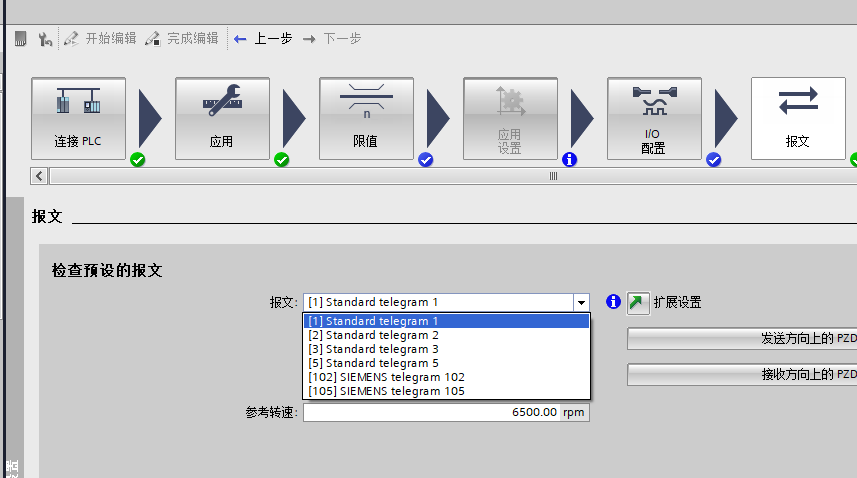
并在“报文”选择合适的Profinet报文,本例中以标准1号报文为例。
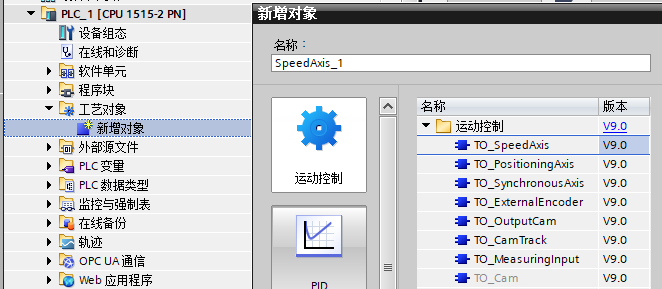
4、在S7-1500 PLC中,双击"新增对象"创建新的工艺对象 (TO),在运动控制中选择速度轴TO_SpeedAxis。
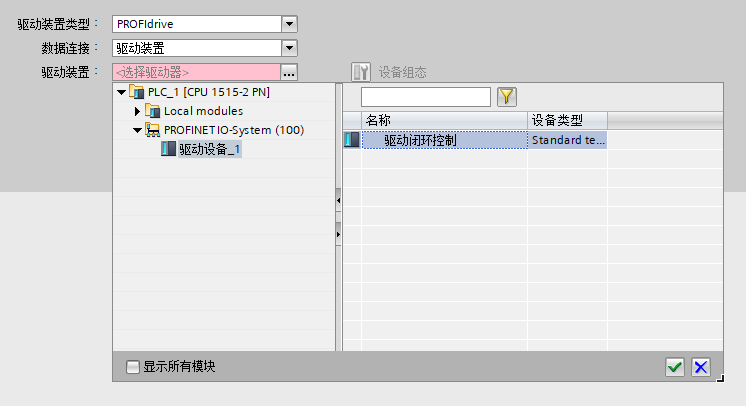
5、配置速度轴的组态。在“硬件接口”的“驱动装置”的,选择需要控制的S200报文。驱动的数据可以采用自动获取的方式,也可以自行配置。
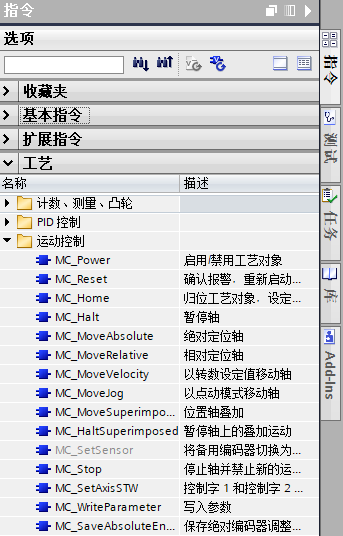
6、在OB1中使用MC_Power、MC_MovVelocity等PLC Open标准程序块编写轴的转速控制程序,PLC Open指令位于工艺指令目录下的运动控制文件夹中,这些指令的相关使用说明,请查看博途的帮助文件(选中指令块,Ctrl+F1键,即可弹出指令帮助说明)。
方法二:使用标准报文1和SINA_SPEED功能块
SINAMICS S200 PN与PLC采用PROFINET RT通信方式,并使用报文1,项目步骤如下:
1. 创建新项目,添加设备、组态IP地址、S200引导式快速设置的操作与上述方法一步骤1~3相同。
2. 因为在SINA_SPEED功能块仅支持1号报文,所以在快速式引导设置中,报文必须选择为标准报文1。
3、编写程序,调用SINA_SPEED功能块,共有两种方式调用,详见下方说明。
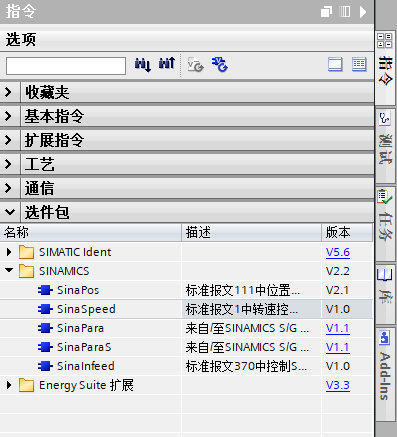
① 在博途软件右侧的“指令“栏中,依次选择“选件包” >> ”SINAMICS” 文件夹 >> SINA_SPEED 功能块。
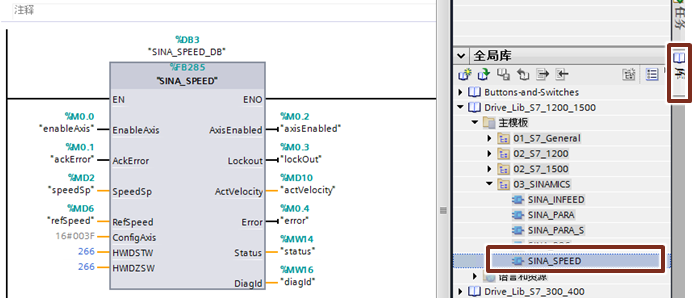
② 下载安装DriveLib库文件,从库文件中调用SINA_SPEED功能块。
DriveLib库文件下载链接:
https://support.industry.siemens.com/cs/cn/zh/view/109475044
4、调用完成后,填写指令的管脚。
注意:管脚HWIDSTW、HWIDZSW须填写为对应S200驱动的1号报文硬件标识符,请参看下图:
在博途设备视图中,选中s200,依次选择“属性” >> “常规” >> “PROFINET接口” >> “报文配置”。

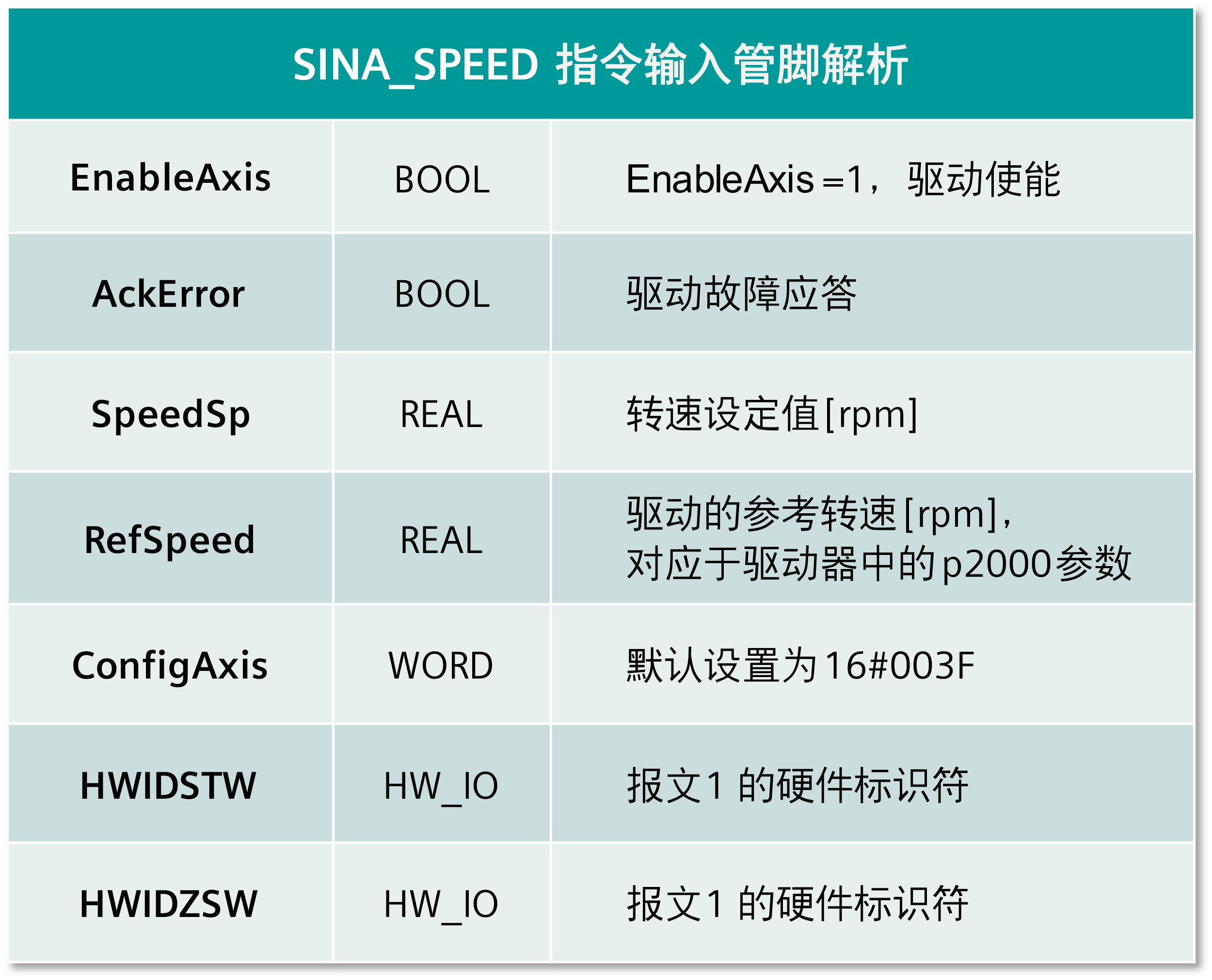
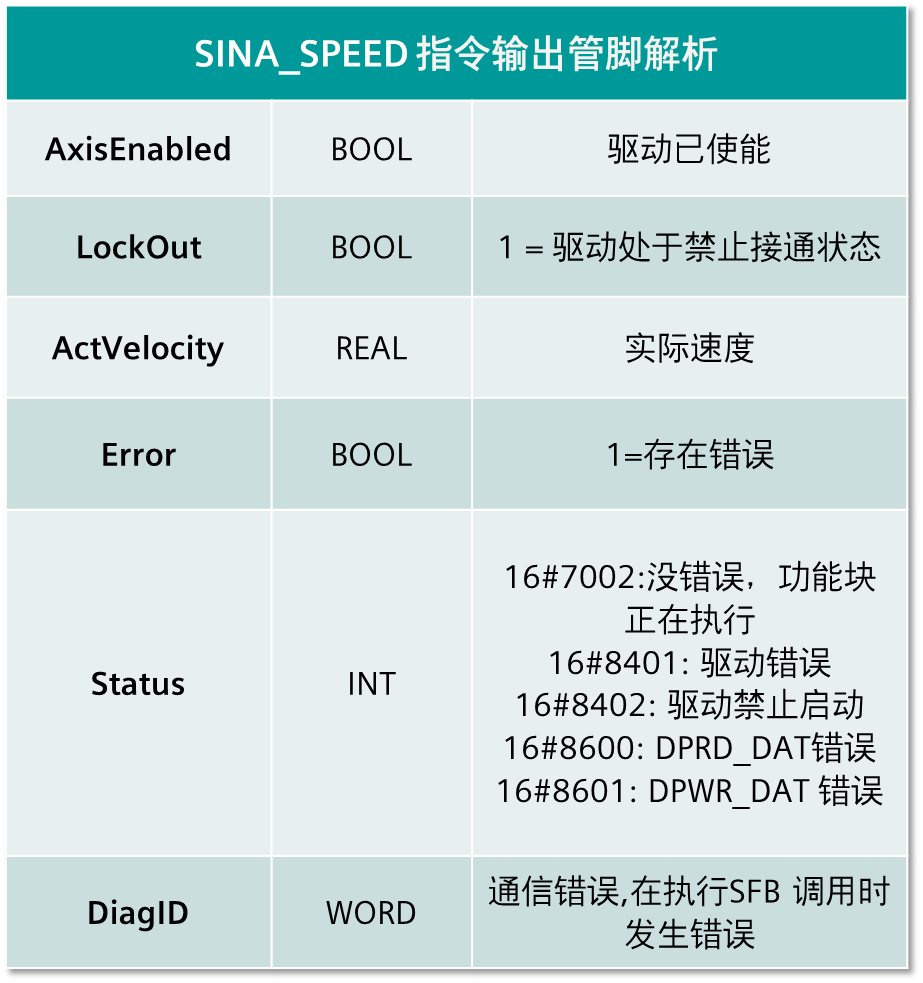
5、SINA_SPEED功能块输入输出引脚说明
方法三:PLC通过IO地址直接控制S200 PN
此种控制方式直接通过读写报文的IO区域进行控制、给定速度,建议使用1号报文或2号报文。
1、本例中S200使用标准报文1,博途项目及网络配置步骤与方法一相同。通过对输出的第一个控制字进行驱动器的起停控制、第二个控制字可以指定电机运行的速度。
S200的报文输入输出地址可从设备视图中查看:

2、在OB1中调用MOVE命令,发送对驱动的控制字及速度给定:
3、通过第一个控制字进行驱动器的起停控制(16#047E->16#047F)
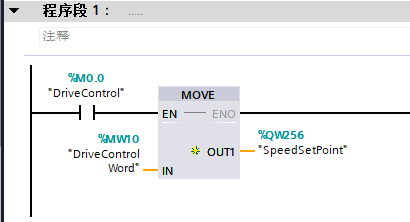
4、通过第二个控制字可以指定电机运行的速度(十六进制16#4000,即十进制的16384对应 p2000 速度参数值)
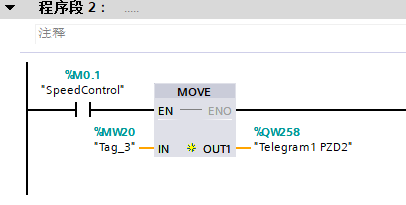
例如,S200 PN的参考转速P2000=3000rpm,如果SpeedSetpoint设置为十进制的8192(即十六进制的16#2000),则表示速度给定为8192 ÷ 16384 * P2000 = 1500 rpm。
常见问题
1、给控制命令不运行有哪些原因?
- 检查S200 PN驱动器是否有故障信息,消除故障
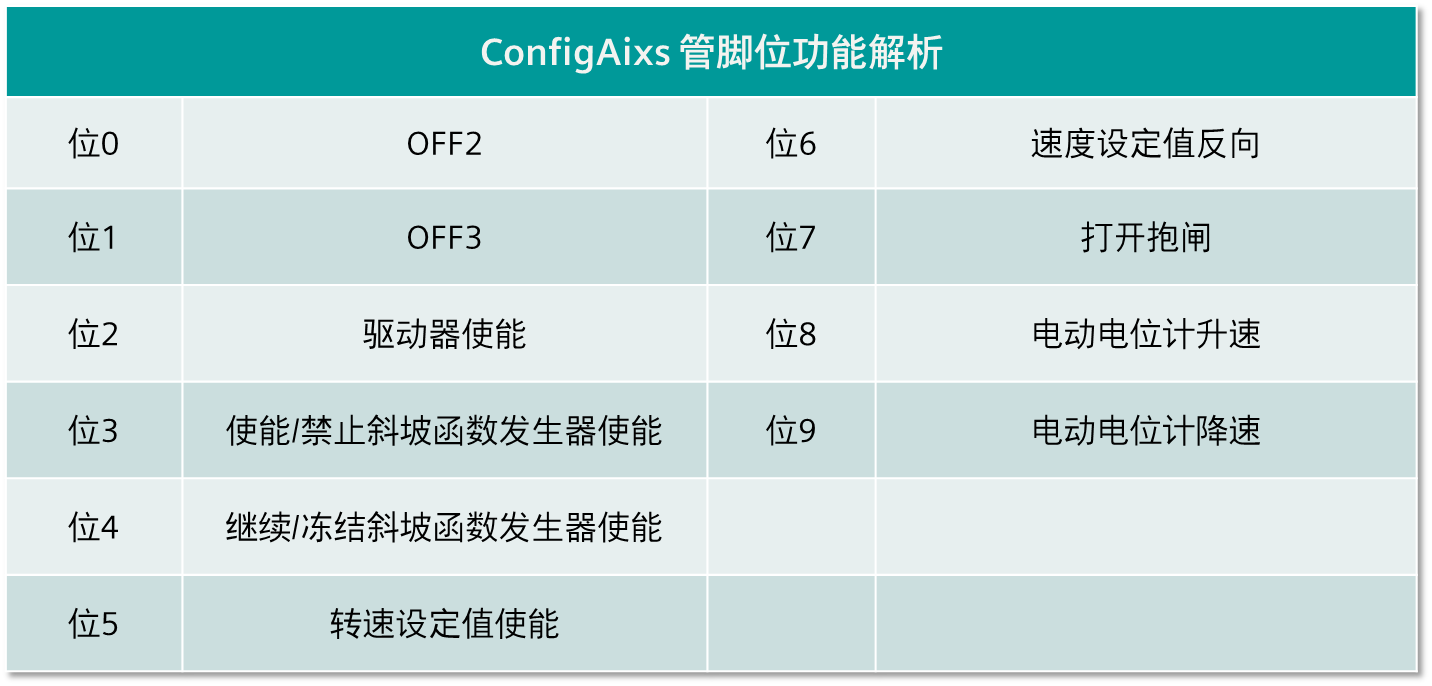
- 对于使用方法二,检查ConfigAxis 输入是否是16#3F,EnableAxis需要上升沿触发且保持。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}