


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART V3.0 PTO轴配置

发布时间:2025年08月18日
- 1
- 2136
S7-200 SMART V3.0 PTO轴配置
STEP 7-Micro/WIN SMART V3 运动控制功能可用于添加并组态以下运动控制组件:
• 虚拟轴:虚拟轴可执行运动控制指令,但不会输出脉冲串。
• PTO 轴:PTO(脉冲串输出)轴是使用脉冲串输出控制电机或其他执行器的轴。
• 编码器轴:增量式记录输入脉冲数,并在轴信息中显示对应的位置和速度。
• 凸轮:电子凸轮根据预定义的电子凸轮表,使用脉冲串控制从轴与主轴同步。
轴数限制
在运动控制中最多创建 16 个轴,每种设备数量的限制如下:
• 虚拟轴:16
• PTO 轴:5
• 编码器轴:2
注:HSC6 和 HSC7 的使用与编码器轴的使用不兼容。因此,如果启用了 HSC6 或 HSC7,只能使用一个编码器轴。如果同时启用了 HSC6 和 HSC7,则无法使用编码器轴,反之亦然。
• 凸轮:8
本节介绍PTO轴的配置。
创建PTO轴
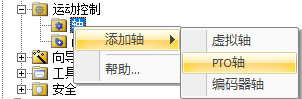
选中“运动控制”(Motion Control)文件夹,右键“添加”-“轴”-“PTO轴”如下图所示。
PTO轴基本配置
添加PTO轴后,将显示如下图所示的“PTO轴基本设置”(PTO Axis Basic Settings) 对话框。可为新添加的轴组态自定义名称。默认名称为“轴_x”,其中“x”代表按照数字顺序创建的轴。

说明:
轴名称允许包含的字母数字字符和下划线的数量最多为 23 个,也允许包含扩展字符(ASCII128 至 ASCII 255)。第一个字符仅限使用字母或下划线。不允许使用关键字作为变量名,也不允许使用以数字开头的变量名,包含非字母数字字符的变量名,或与现有指令名称或关键字相同的变量名。轴名称不可重复,也不能与现有变量名相同。
机械及限位
在“组态”(Configuration) 面板中单击“机械及限位”(Mechanical and Limits) 时,将显示以下信息:
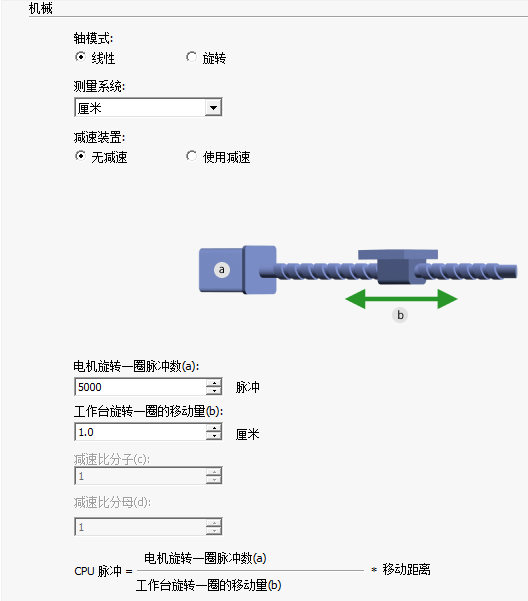
轴模式:
线性:在此模式下,轴可沿直线移动,通常由线性导轨或轨道引导
旋转:在此模式下,轴可以围绕中心点或旋转轴旋转
测量系统
脉冲:
• 控制轴运动的所有速度均以“每秒脉冲数”为单位表示。
工程单位:
• 工程单位支持厘米、毫米、英寸、度,控制轴运动的所有速度均以“测量系统”每秒为单位表示。
减速装置
脉冲模式不支持使用“减速装置”(Reduction gear)
需要组态的参数如下:
• 电机/编码器旋转一圈脉冲数(请参见电机/编码器或驱动器的数据
表)
• 工作台旋转一圈的移动量
如果在“减速装置”(Reduction gear) 中选择“使用减速”(Use
reduction),则必须对“减速比分子”(Gear numerator) 和“减速比分
母”(Gear denominator) 参数进行组态。
模数
模数如下图所示:

只有在“轴模式”(Axis mode) 中选择了“旋转”(Rotary),才能应用“模数”(Modulo) 组态。
“初始值”(Initial value) 定义了轴开始移动时的度数,而“长度”(Length) 定义了轴需要移动多少度。
限位
可以定义将硬件负限位 (LMT-) 和硬件正限位 (LMT+) 输入分配给哪些引脚,以及限位输入的 特性,包括“响应”(Response)和“触发电平”(Trigger Level)。
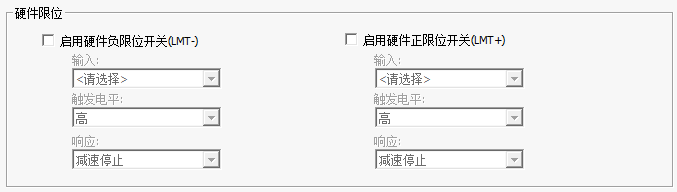
默认情况下禁用LMT-/LMT+ 输入。禁用此输入时,也禁用所有其他相关参数。选中“启用硬件负限位开关”(Enabled Hardware negative limit switches) 或“启用硬件正限位开 关”(Enabled Hardware positive limit switches) 复选框时,可以访问“输入”(Input)、“响应”(Response) 和“触发电平”(Trigger Level) 参数。
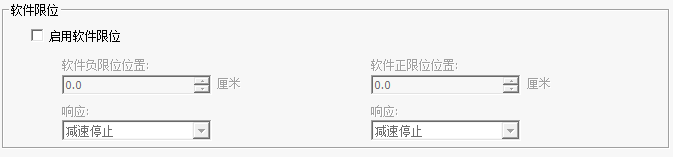
还可以启用软件限位,默认情况下禁用软件限位。禁用此输入时,也禁用所有其他相关参数。选中“启用软件限位”(Enabled Software limit) 复选框时,可以访问“软件负限位位置”(Software negativelimit)、“软件正限位位置”(Software positive limit)、和“响应”(Response) 参数。
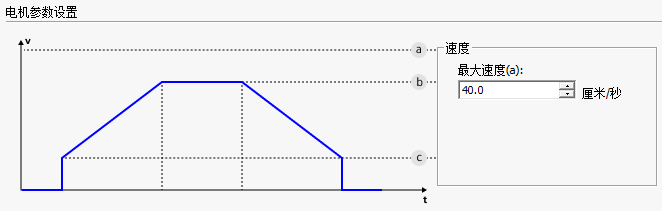
参数
在“电机参数设置”(Motor Speeds) 对话框中,可以定义应用的最大速度。
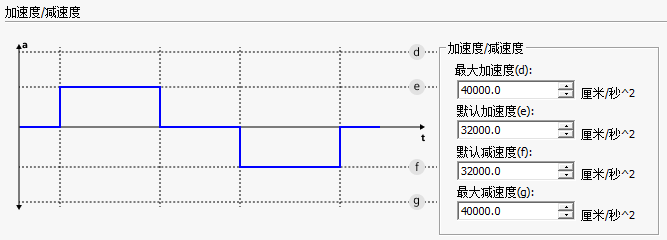
在“加速度/减速度”(Acceleration/Deceleration) 对话框中,可为应用指定加速度和减速度。
在“加加速度”(Jerk) 对话框中,可选择“启用加加速度(EnableJerk)复选框以向加速度或减速度应用加加速度补偿。加加速度补偿提供较平稳的位置控制,方法是减少移动包络加速和减速部分中的加加速度(速率变化)。
回原点
如果需要模式3主动回零,需要组态RPS,如下图所示:
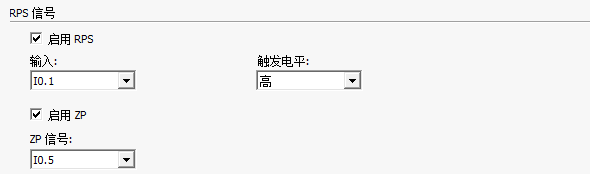
启用 RPS
在“RPS 信号”(RPS Signal) 对话框中,可以定义参考点查找输入分配给哪个引脚以及 RPS 输入的特性,包括“触发电平”(Trigger Level)。 RPS 输入定义执行参考点查找命令时的原点位置或参考点。
默认情况下禁用 RPS 输入。禁用此输入时,也禁用该页面上的所有其他参数。选中“启用”(Enabled) 复选框时,可以访问“输入”(Input) 和“触发电平”(Trigger Level) 参数。
输入参数
可将 RPS 分配给 CPU 上的一个输入。可分配 CPU 上从 I0.0 到 I1.7 之间的任何一个输入,但 此输入 (I) 不能再用于此轴或其他轴的运动控制功能。因此,如果运动控制组态中的另一个功能使用输入 (I),则该输入 (I) 不会再此输入的选择下拉列表中显示。
触发电平
在此参数中,可指定RPS输入的触发电平。如果设为高电平,有电流流入输入时读取逻辑 1。 如果设为低电平,没有电流流入输入时读取逻辑 1。默认设置是高电平。
启用 ZP
可通过选择“启用 ZP”(Enable ZP) 复选框定义 ZP 输入分配给哪个输入引脚。零脉冲 (ZP) 输 入有助于建立参考点查找 (RPS) 命令中所用参考点或原点位置。通常,每转一圈,电机驱动器/放大器就会产生一个 ZP 脉冲。 可分配 CPU上的ZP输入。可分配CPU上的 I0.0 到 I1.7,但此输入(I)不能再用于此轴或其 他轴的运动控制功能。
回原点
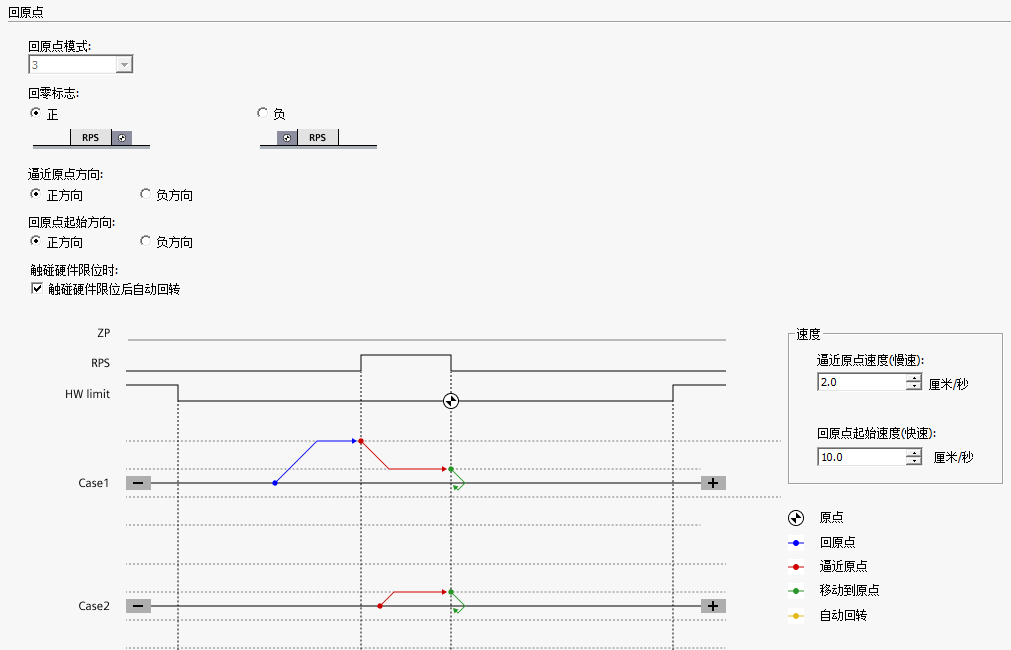
回零标志
选择负向或正向作为原始方向。
逼近原点方向</strong>/回原点起始方向
通过选择方向,您可以确定在主动回原点过程中用于寻找回原点开关的逼近方向以及回原点
的方向。回原点方向指定了在执行回原点操作时,轴向回原点开关配置端移动的方向。
触碰硬件限位时
如果选择此“触碰硬件限位后自动回转”(Auto-return when hardware limit is reached),则轴能够反向旋转至归零点。
速度
• 逼近原点速度:定义逼近原点的速度
• 回原点起始速度:定义回原点的起始速度
如果期望的原点位置与回原点开关的位置有偏移,则可在该字段中指定原点位置偏移。
如果值不等于 0,轴回到回原点开关位置后将执行以下动作:
1. 以回原点速度使轴移动原点位置偏移值。
2. 到达“原点偏移”(home position offset) 后,原点处于“MC_Home”运动控制指令“位置”(Position) 参数中指定的原点。
其他
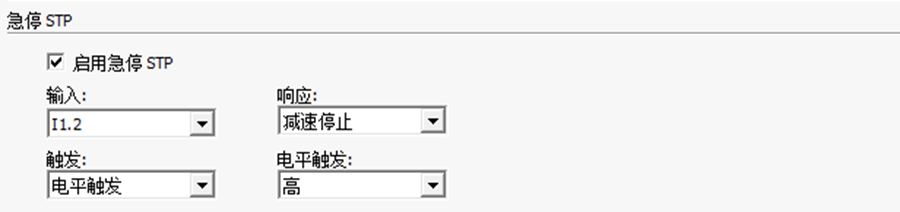
启用急停 STP
在“急停 STP”(Emergent Stop) 对话框中,可以通过选择“启用急停 STP”(Enable STP) 复选 框来定义停止输入的引脚以及停止输入的特性。
STP 输入有以下功能:
• 使任何激活的运动控制命令减速至启动-停止速度并在减速后立即停止脉冲
• 当“触发”(Trigger) 设置为“电平触发”(Level) 时防止启动新的运动命令可作为来自步进/伺服驱动器的就绪信号
• 如果激活,通过将“触发器”(Trigger) 设置为“边沿”(Edge),停止前一个运动后,可以启动新的运动。默认情况下不选择“启用急停 STP”(Enable STP) 复选框,且 STP 对话框上的所有其他参数都
会禁用。选中“启用急停 STP”(Enable STP) 复选框时,可以访问“输入”(Input)、“响应”(Response)、“触发”(Trigger) 和“电平触发”(Level) 参数。
输入
可将 STP 分配给 CPU 上的一个输入。可分配 CPU 上从 I0.0 到 I1.7 之间的任何一个输入,但 此输入 (I) 不能再用于此轴或其他轴的运动控制功能。因此,如果运动控制组态中的另一个功能使用输入 (I),则该输入 (I) 不会再此输入的选择下拉列表中显示。
“响应” 参数
在此参数中,可以指定如果 STP 输入激活则应发生什么。默认设置是“减速停止”(Decelerated Stop)。可以选择以下两个选项之一:
• “减速停止”(Decelerated Stop):使任何激活的运动控制命令减速至启停速度并停止脉冲
• “立即停止”(Immediate Stop):使任何激活的运动控制命令立即停止脉冲
“电平触发” 参数
在此参数中,可指定 STP 输入的触发器。默认设置为“电平”(Level)。可以选择以下两个选项之一:
• 电平:如果选择电平触发器,每当输入激活时运动都会停止。电平触发器设置阻止启动 任何新的运动,直到 STP 输入变为未激活状态。
• “边沿”(Edge):如果选择边沿触发器,仅当输入从非激活变为激活时运动才停止。边沿触 发设置允许前一个运动停止后启动新的运动,即使 STP 输入仍处于非激活状态。 当运动停止时,输入变为非激活状态,轴可以开始另一运动。
PTO轴支持探针功能,如下图所示:
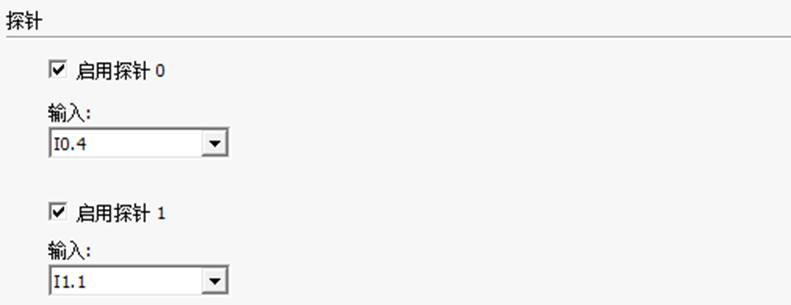
可通过选择“启用探针0”(Enable probe 0) 和“启用探针1”(Enable probe 1) 来启用探针控制。
输入
选择接触式探针的输入。可分配CPU上从I0.0到I1.7之间的任何一个输入。
控制面板
可使用“控制面板”(Control Panel) 来帮助开发 STEP 7-Micro/WIN SMART V3的运动控制功能。可通过该界面便捷地调试、操作和监视 SMART V3的工作状态。
前提条件
使用“控制面板”(Control Panel)前,确保已完成以下操作:
• 已将项目下载到CPU中。否则,CPU就没有运行所需的有效程序。
• CPU 工作状态被设置为“STOP”模式
打开控制面板
1. 在程序编辑器底部单击要调试的轴的选项卡。
2. 单击“控制面板”(Control Panel)
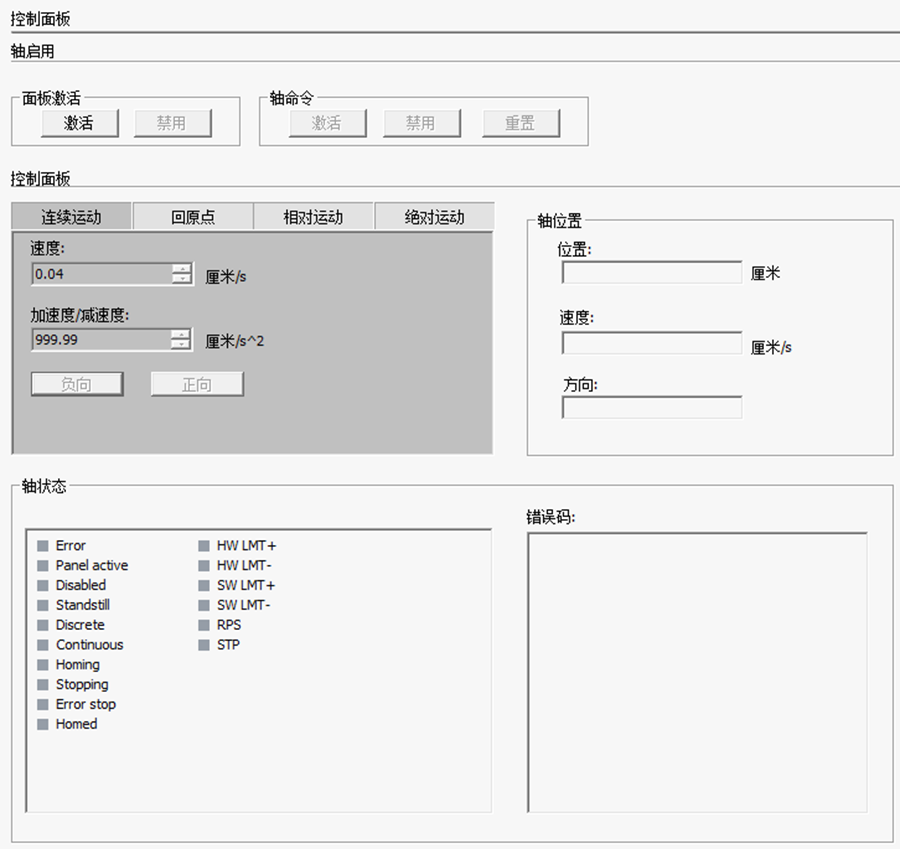
轴启用
面板激活:建立与 CPU 的在线连接并接管 PTO 轴主控权。
面板禁用:禁用控制面板中的轴控制
轴命令激活:启用轴,将轴状态从“Disable”更改为“StandStill”。
轴命令禁用:禁用轴,将轴状态从“StandStill”更改为“Disable”。
轴命令重置:将轴状态机器从“ErrorStop”状态复位为 “StandStill”或“Disabled”。
控制面板
可组态并测试“连续运行”(Continuous run)、“回原点”(Homing)、“相对运动”(Relative) 和 “绝对运动”(Absolute)。轴的实时位置、速度和方向可通过“轴位置”(Axis position) 对话框监视。
轴状态
在控制面板的下方可以看到轴的状态及错误码。
诊断信息
诊断功能用于监视已组态轴的重要状态和错误消息。
可通过单击“开始”(Start) 按钮和“结束”(Stop) 按钮来启用和禁用运动控制诊断过程。
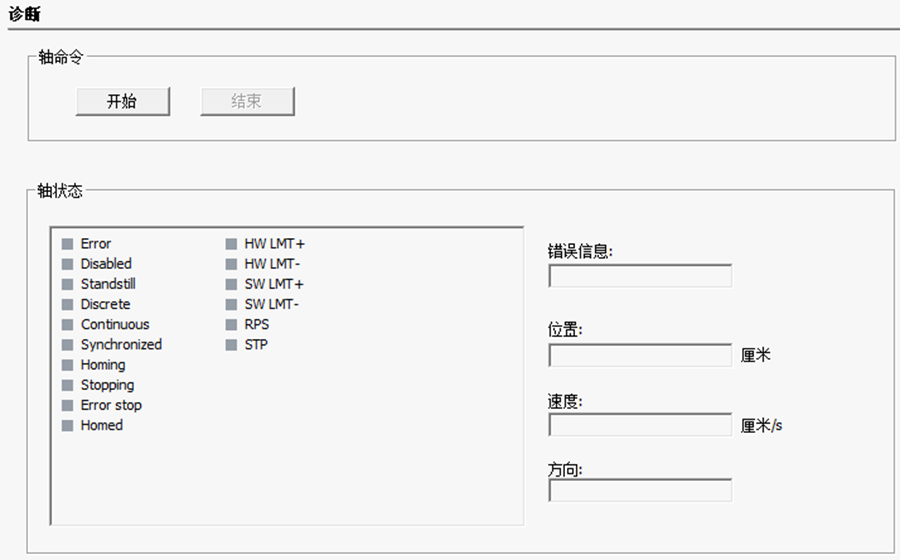
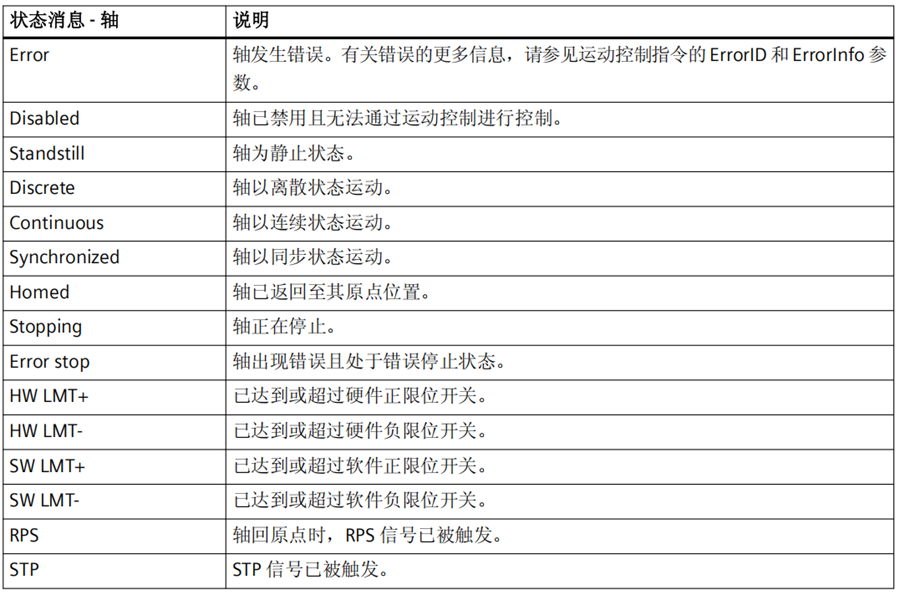
轴状态的具体含义及轴的错误信息、位置、速度和方向请参考下面的表格。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}