


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART V3.0 虚拟轴配置

发布时间:2025年08月18日
- 0
- 1092
S7-200 SMART V3.0 虚拟轴配置
STEP 7-Micro/WIN SMART V3 运动控制功能可用于添加并组态以下运动控制组件:
• 虚拟轴:虚拟轴可执行运动控制指令,但不会输出脉冲串。
• PTO 轴:PTO(脉冲串输出)轴是使用脉冲串输出控制电机或其他执行器的轴。
• 编码器轴:增量式记录输入脉冲数,并在轴信息中显示对应的位置和速度。
• 凸轮:电子凸轮根据预定义的电子凸轮表,使用脉冲串控制从轴与主轴同步。
轴数限制
在运动控制中最多创建 16 个轴,每种设备数量的限制如下:
• 虚拟轴:16
• PTO 轴:5
• 编码器轴:2
注:HSC6 和 HSC7 的使用与编码器轴的使用不兼容。因此,如果启用了 HSC6 或 HSC7,只能使用一个编码器轴。如果同时启用了 HSC6 和 HSC7,则无法使用编码器轴,反之亦然。
• 凸轮:8
本节介绍虚拟轴的配置。
创建虚拟轴
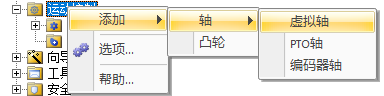
选中“运动控制”(Motion Control)文件夹,右键“添加”-“轴”-“虚拟轴”如下图所示。
虚拟轴基本配置
添加虚拟轴后,将显示如下图所示的“虚拟轴基本设置”(Virtual AxisBasic Setting) 对话框。可为新添加的轴组态自定义名称。默认名称为“轴_x”,其中“x”代表按照数字顺序创建的轴。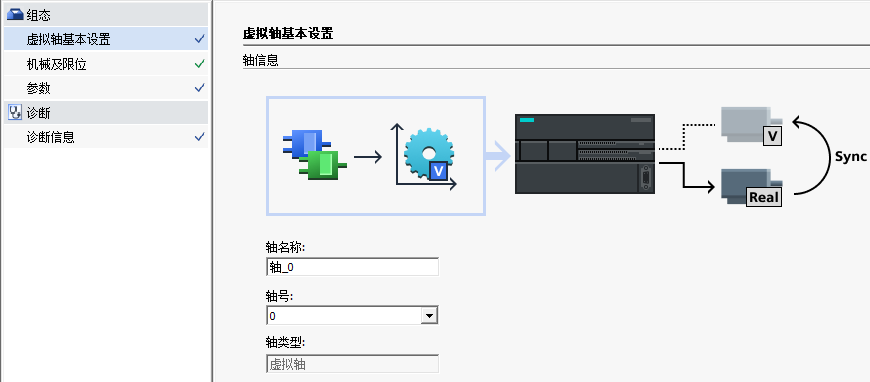
说明:
轴名称允许包含的字母数字字符和下划线的数量最多为 23 个,也允许包含扩展字符(ASCII128 至 ASCII 255)。第一个字符仅限使用字母或下划线。不允许使用关键字作为变量名,也不允许使用以数字开头的变量名,包含非字母数字字符的变量名,或与现有指令名称或关键字相同的变量名。轴名称不可重复,也不能与现有变量名相同。
机械及限位
轴模式:
线性:在此模式下,轴可沿直线移动,通常由线性导轨或轨道引导
旋转:在此模式下,轴可以围绕中心点或旋转轴旋转
测量系统
脉冲:
• 控制轴运动的所有速度均以“每秒脉冲数”为单位表示。
工程单位:
• 工程单位支持厘米、毫米、英寸、度,控制轴运动的所有速度均以“测量系统”每秒为单位表示。
减速装置
脉冲模式不支持使用“减速装置”(Reduction gear)
需要组态的参数如下:
• 电机/编码器旋转一圈脉冲数(请参见电机/编码器或驱动器的数据表)
• 工作台旋转一圈的移动量
如果在“减速装置”(Reduction gear) 中选择“使用减速”(Usereduction),则必须对“减速比分子”(Gear numerator) 和“减速比分母”(Gear denominator) 参数进行组态。
模数
模数如下图所示:

只有在“轴模式”(Axis mode) 中选择了“旋转”(Rotary),才能应用“模数”(Modulo) 组态。
“初始值”(Initial value) 定义了轴开始移动时的度数,而“长度”(Length) 定义了轴需要移动多少度。
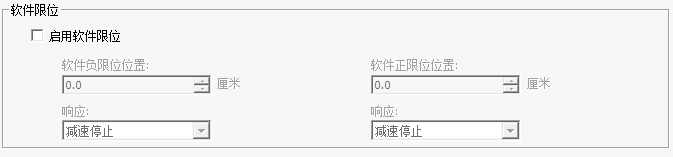
软件限位
默认情况下禁用软件限位。禁用此输入时,也禁用所有其他相关参数。选中“启用软件限位”(Enabled Software limit) 复选框时,可以访问“软件负限位位置”(Software negativelimit)、“软件正限位位置”(Software positive limit)、和“响应”(Response) 参数。
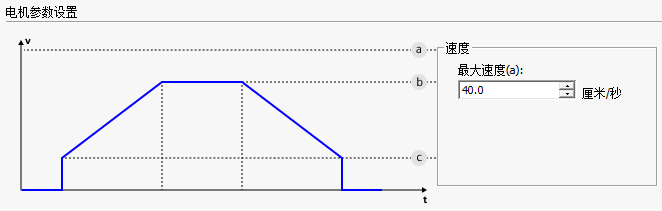
参数
在“电机参数设置”(Motor Speeds) 对话框中,可以定义应用的最大速度。
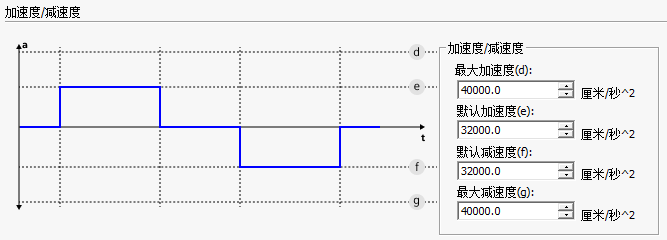
在“加速度/减速度”(Acceleration/Deceleration) 对话框中,可为应用指定加速度和减速度。
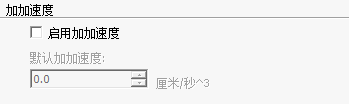
在“加加速度”(Jerk) 对话框中,可选择“启用加加速度(EnableJerk)复选框以向加速度或减速度应用加加速度补偿。加加速度补偿提供较平稳的位置控制,方法是减少移动包络加速和减速部分中的加加速度(速率变化)。
诊断信息
诊断功能用于监视已组态轴的重要状态和错误消息。
可通过单击“开始”(Start) 按钮和“结束”(Stop) 按钮来启用和禁用运动控制诊断过程。
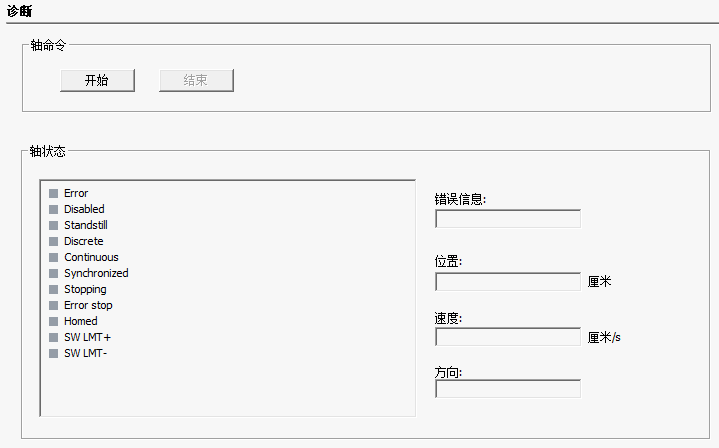
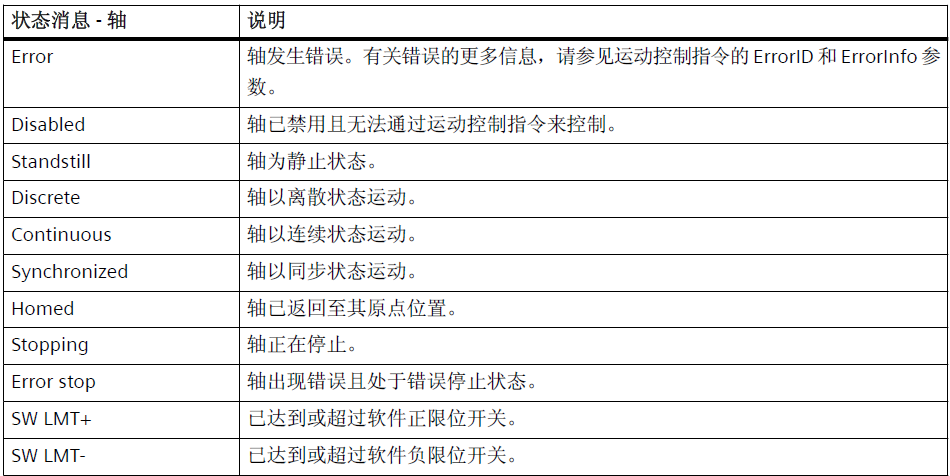
在轴的诊断窗口可以显示轴的错误信息、位置、速度、方向及轴状态,轴状态的具体含义请参考下面的表格。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}