


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART V3.0 回原点介绍

发布时间:2025年08月18日
- 0
- 1967
S7-200 SMART V3.0 回原点介绍
STEP 7-Micro/WIN SMART V3提供了两种回零方式,一种方式是通过控制面板回零(仅适用于PTO轴),另外一种方式是使用指令MC_Home回零。
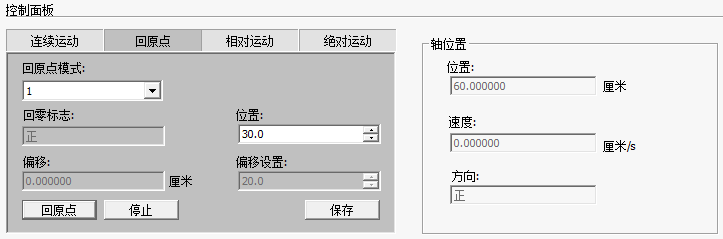
控制面板回零
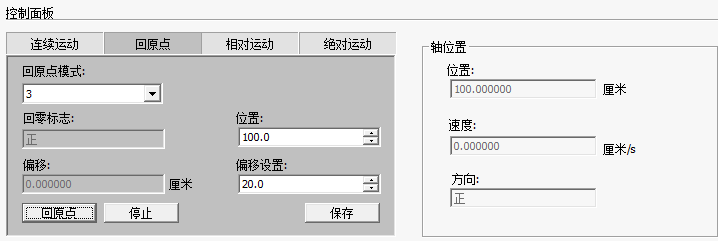
控制面板回零只能检查控制系统接线是否正确,调整运动控制参数组态并测试每个预定义的运动曲线。回原点模式支持0、1、3三种模式。模式3可以设置原点偏移。
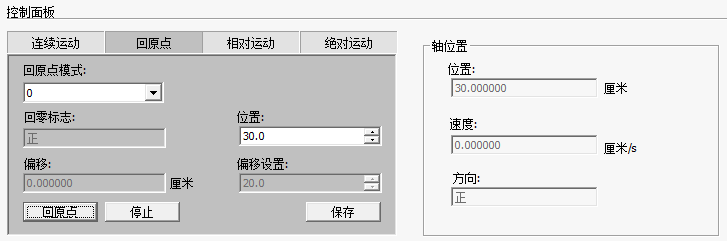
单击“回原点”(Home),触发回原点运动。
单击“停止”(Stop) 以停止运动。
MC_Home指令回零
MC_Home指令
使用MC_Home指令设置或搜索轴的原点。
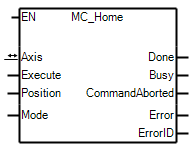
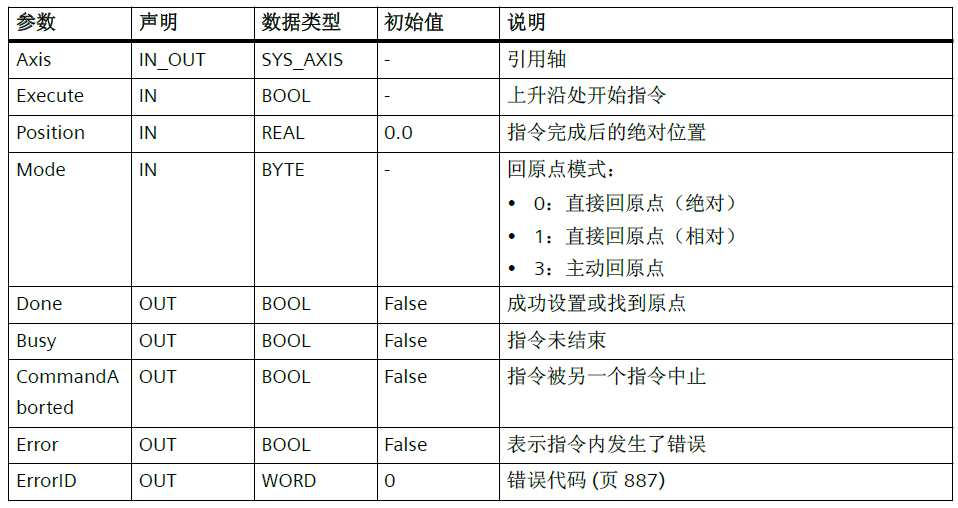
MC_Home参数
MC_Home参数如下:
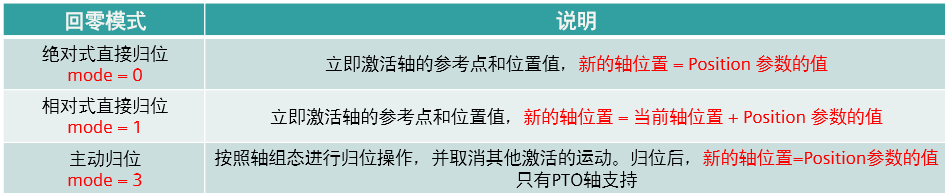
Mode模式说明如下:
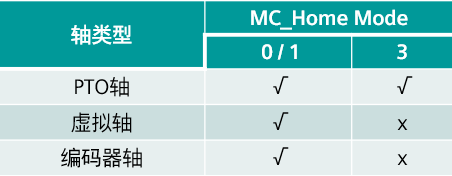
PTO轴、虚拟轴、编码器轴支持的Mode模式如下表所示:
回原点组态
模式3主动回零,需要组态RPS,如下图所示:
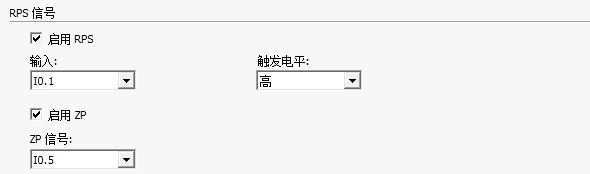
启用 RPS
在“RPS 信号”(RPS Signal) 对话框中,可以定义参考点查找输入分配给哪个引脚以及 RPS 输入的特性,包括“触发电平”(Trigger Level)。 RPS 输入定义执行参考点查找命令时的原点位置或参考点。
默认情况下禁用 RPS 输入。禁用此输入时,也禁用该页面上的所有其他参数。选中“启用”(Enabled) 复选框时,可以访问“输入”(Input) 和“触发电平”(Trigger Level) 参数。
输入参数
可将 RPS 分配给 CPU 上的一个输入。可分配 CPU 上从 I0.0 到 I1.7 之间的任何一个输入,但 此输入 (I) 不能再用于此轴或其他轴的运动控制功能。因此,如果运动控制组态中的另一个功能使用输入 (I),则该输入 (I) 不会再此输入的选择下拉列表中显示。
触发电平
在此参数中,可指定RPS输入的触发电平。如果设为高电平,有电流流入输入时读取逻辑 1。 如果设为低电平,没有电流流入输入时读取逻辑 1。默认设置是高电平。
启用 ZP
可通过选择“启用 ZP”(Enable ZP) 复选框定义 ZP 输入分配给哪个输入引脚。零脉冲 (ZP) 输 入有助于建立参考点查找 (RPS) 命令中所用参考点或原点位置。通常,每转一圈,电机驱动器/放大器就会产生一个 ZP 脉冲。 可分配 CPU上的ZP输入。可分配CPU上的 I0.0 到 I1.7,但此输入(I)不能再用于此轴或其 他轴的运动控制功能。
回原点
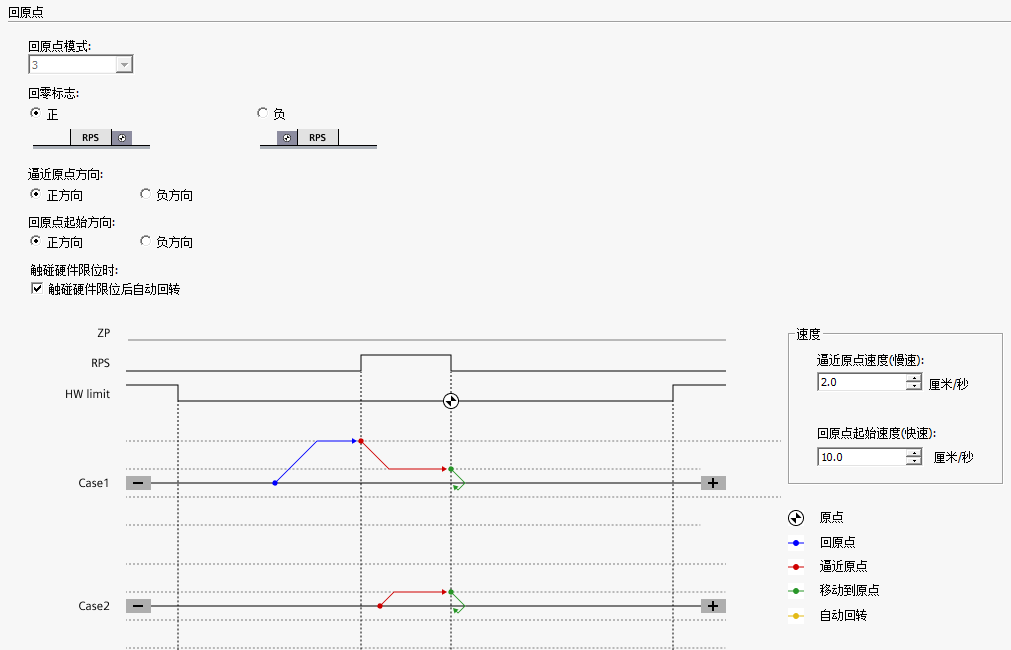
回零标志
选择负向或正向作为原始方向。
逼近原点方向</strong>/回原点起始方向
通过选择方向,您可以确定在主动回原点过程中用于寻找回原点开关的逼近方向以及回原点的方向。回原点方向指定了在执行回原点操作时,轴向回原点开关配置端移动的方向。
触碰硬件限位时
如果选择此“触碰硬件限位后自动回转”(Auto-return when hardware limit is reached),则轴能够反向旋转至归零点。
速度
• 逼近原点速度:定义逼近原点的速度
• 回原点起始速度:定义回原点的起始速度

如果期望的原点位置与回原点开关的位置有偏移,则可在该字段中指定原点位置偏移。
如果值不等于 0,轴回到回原点开关位置后将执行以下动作:
1. 以回原点速度使轴移动原点位置偏移值。
2. 到达“原点偏移”(home position offset) 后,原点处于“MC_Home”运动控制指令“位置”(Position) 参数中指定的原点。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}