


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

驱动器优化(一键优化、实时优化)

发布时间:2025年09月17日
- 0
- 2221
主要介绍驱动器优化的方法,包括websever、startdrive优化等。
驱动器优化(一键优化、实时优化)
一、优化说明
优化是调节驱动器控制环的 参数,用于获得期望性能的过程。S200伺服驱动器具有的一键自动优化、实时自动优化的功能,可以简化对于伺服系统优化方面的调试工作,降低了伺服系统的调试难度,对于解决运行中震动、异响应等问题发挥出卓越的性能。
(1)一键优化:
– 该过程中会自动优化转速控制器和位置控制器。优化过程中,伺服驱动系统会转动测量一次,对于行程范围允许的工况下,推荐优先使用。
(2)实时优化:
– 在该优化过程中,并不会自动转动测量,需要外部控制指令伺服轴转动,控制器参数是通过估算出的恒定转动惯量或设置的转动惯量来确定的。
在计算出控制器数据并掉电保存控制器优化后获得的数值以及滤波器设置后,需要立即关闭实时优化。
(3)手动优化:
当自动优化功能没有达到预期的优化效果时,可以进行手动优化。
二、优化具体步骤
- Startdrive 一键优化:
1. 点击“控制权”处的“激活”按钮。
2. 在 “行程限制从0至” 处输入一个合适的角度,该角度是电机旋转测量转动的角度,需要设置合适角度;另一方面要注意避免损坏机械装置。该角度应当至少为 60°,以便确定合理的控制器参数。运行距离越长,优化结果也就也好。
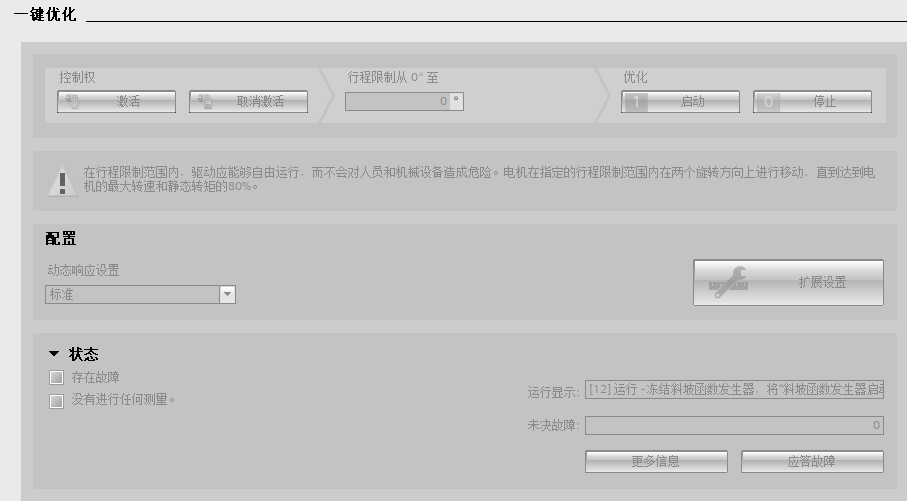
3. 根据机器的机械情况选择一键优化功能的动态响应设置。
一键优化会根据选中的动态响应设置来优化驱动器。
– 保守型:转速控制缓慢,机械负载低。
– 标准型:最佳均衡,快速转速控制的同时保持低机械负载
– 动态型:转速控制迅速,动态性好,机械负载高
4. 点击“开始”,启动优化,此时电机来时。
5. 检查优化结果,点击“控制权”下的 “取消激活”,将优化结果保存到ROM区。
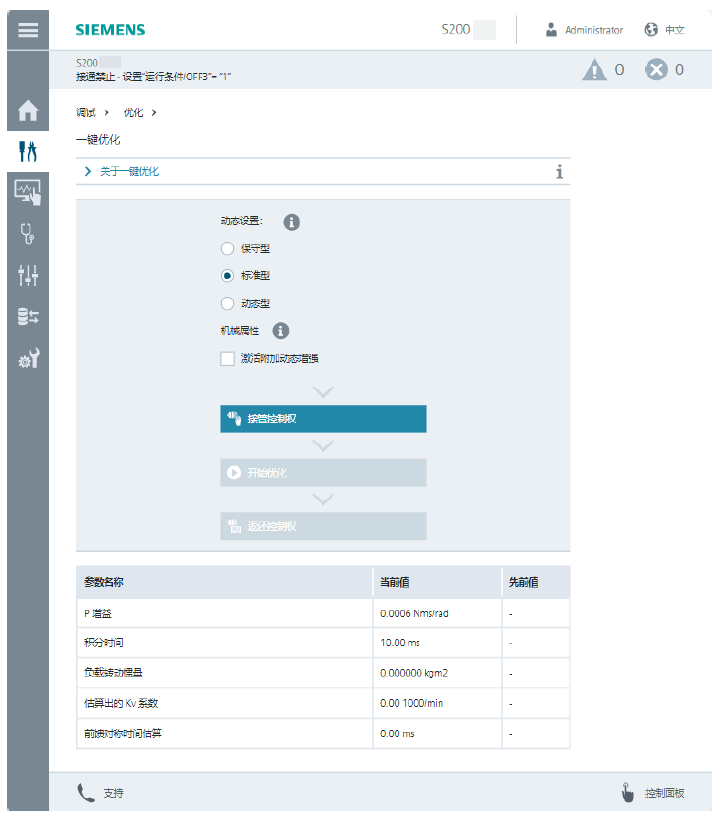
- 网络服务器(webserver) 一键优化:
在“调试” >> “优化”,在 “动态设置” 中选择合适的设置,点击“接管控制权”,点击“开始优化,输入旋转角度(最大行程)”,完成优化后,点击“返还控制权”;
- Startdrive 实时优化:
- 配置实时优化功能(p5302),由下表设置。
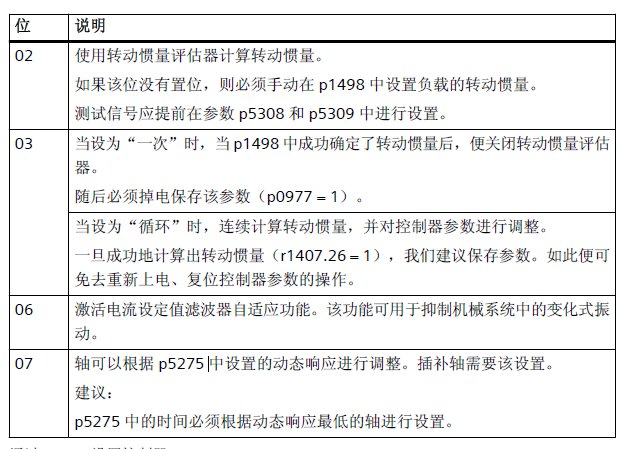
2、通过 p5271 设置控制器,有以下常用设置。
3、激活实时优化功能(p5300 = 2)。运行驱动系统,启动优化。
4、测试运行,若没有获得预期的优化结果时,可调整实时优化动态系数 p5272。
5、如需保存优化后的转速值和位置控制器参数值,要将参数保存在非易失存储器中(“从RAM 复制到 ROM”或 p0977 = 1)。
- 手动优化:
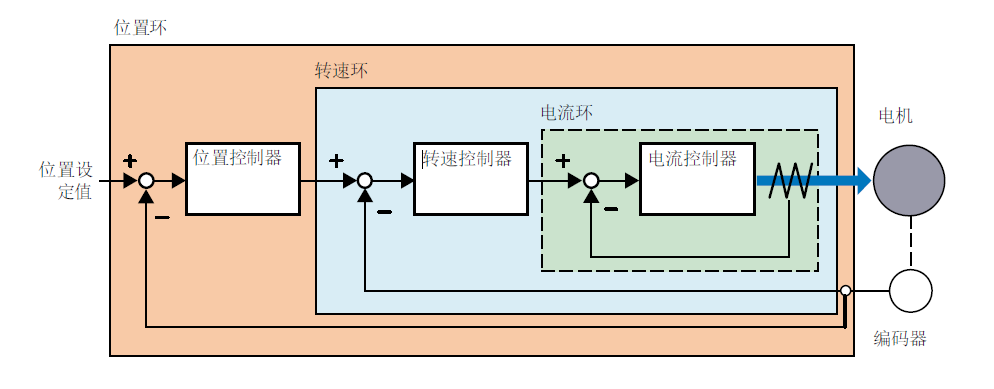
驱动器包含三个控制环,我们可以通过对控制环的伺服增益进行设置,优化机械的响应性能,伺服增益可通过一组参数进行设置。这些参数会相互影响,因此在优化时必须考虑所设值之间的平衡。
- 电流控制环
- 转速控制环
- 位置控制环
手动优化需要重点关注的参数:
• 位置环增益P1460
位置环增益直接影响位置环的响应性能。如机械系统未振动或产生噪音,可增加位置环增益,以提升位置环响应性能并缩短定位时间。
• 位置环前馈增益P1462
可缓慢增加位置环前馈增益,以提升响应性能并减小位置偏移。过高的位置环前馈增益会导致电机转速超调以及数字量输出信号 INP 重复开/关。
• 转速环增益P2534
转速环增益直接影响转速环的响应性能。如机械系统未振动或产生噪音,可增加转速环增益,以提升转速环响应性能。
• 转速环积分时间P2538
通过将积分分量加入转速环,驱动器可消除转速的稳态误差并对转速的微小变化作出响应。
一般情况下,如机械系统未振动或产生噪音,可减小转速环积分时间,从而增加系统刚性。如机械系统有谐振系数或负载惯量比很高,可增大转速环积分时间,以消除谐振。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}