


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART V3.0 轴组指令介绍

发布时间:2025年10月13日
- 0
- 697
S7-200 SMART V3.0 轴组指令介绍
S7-200 SMART V3.0 轴组指令介绍
1. MC_GroupEnable
功能:将轴组的状态从Disabled更改为Standby,不产生任何运动。
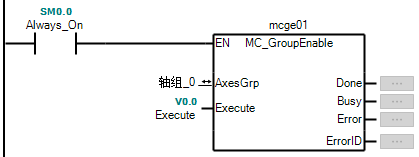
图1 MC_GroupEnable指令
EN:参数必须开启,才能启用其它运动控制子例程向轴组发送命令
AxesGrp:选择组态的轴组
Execute:上升沿触发
Done:当指令完成时,轴组处于Standby状态
Busy:指令未完成时等于1
Error:错误指示位
ErrorID:错误代码
注意:轴组中的每个单轴必须先使能后,再触发MC_GroupEnable指令;MC_GroupEnable不能被任何其它运动控制终止或缓冲。
2. MC_GroupDisable
功能:将轴组的状态更改为Disabled,不产生任何运动。
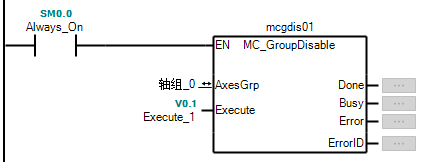
图2 MC_GroupDisable指令
指令引脚功能参考指令MC_GroupEnable
注意: MC_GroupDisable不能被任何其它运动控制终止或缓冲;禁用轴组将立即终止关联轴组的所有运动控制指令。
3. MC_GroupReset
功能:通过重置所有与轴组相关的内部错误,将状态从ErrorStop切换到Standby或Disabled。此指令不影响任何其它指令的输出。该指令还像MC_Reset一样重置该轴组中的所有轴。
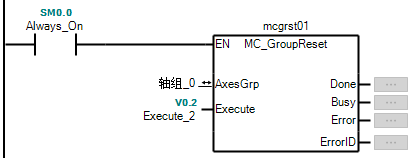
图3 MC_GroupReset指令
指令引脚功能参考指令MC_GroupEnable
注意: 轴组内各轴和轴组本身必须配置正确,Axes Group必须处于ErrorStop状态。MC_GroupReset指令不能被任何其它动作终止或缓冲;新的MC_GroupReset指令不会中止或缓冲任何其它活动的运动控制指令。
4. MC_GroupStop
功能:命令轴组减速和停止,并将轴组转移到Stopping状态,该指令可中止任何正在执行的指令。当轴组处于Stopping状态时,其它指令不能在同一轴组上执行运动命令。在轴组达到速度零后,Done输出立即设置为TRUE。只要Execute输入为TRUE或速度尚未达到零,轴组就保持在Stopping状态。一旦Done输出设置为1,Execute输入设置为0,则轴组转换到Standby状态。

图4 MC_GroupStop指令
Execute:上升沿触发
Deceleration:减速度值
Jerk:加加速度值
CommandAborted:该命令被其他指令终止,轴组状态变Disabled。
其余指令引脚功能参考指令MC_GroupEnable
注意:
– MC_GroupStop 指令可由以下运动控制指令中止:
MC_GroupDisable
MC_Power
– MC_GroupStop 指令无法由任何运动控制指令缓冲。
– MC_GroupStop 指令会中止以下主动运动控制指令:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
– MC_GroupStop 指令无法缓冲到任何运动控制指令。
5. MC_MoveLinearAbsolute

图5 MC_ MoveLinearAbsolute 指令
功能:让轴组在笛卡尔坐标系进行线性插补,从当前位置运动到指定的 绝对位置。 该指令支持 2D 和 3D 线性运动。
Execute:上升沿触发
Position:最终位置,ARRAY [0..3] OF REAL是一个real类型的数组,有4个元素,前3个元素分别代表了X轴\Y轴\Z轴的位置,第四个元素预留。
例:MC_GPOS01定义见下图

图6 MC_ MoveLinearAbsolute 指令Position引脚定义
Velocity:笛卡尔坐标系中已定义路径的速度[单位长度/秒],始终为正值,不一定要达到(为复合速度,这个速度不能大于轴组和单组的最大速度)。
Acceleration:加速度值,始终为正值,不一定要达到。
Deceleration:减速度值,始终为正值,不一定要达到。
Jerk:加加速度值,始终为正值。
BufferMode:
• 0:中断模式。根据原命令的 Deceleration 的值,在原路径速度降为
零。然后启动该命令。
• 1:缓冲模式。当前运动结束后启动指令
TransitionMode:预留
TransitionParam:预留
Active:表示指令可对轴组进行控制
其余指令引脚功能参考指令MC_GroupStop
注意:因为是绝对位置运动,使能指令前每个单轴都必须先回零位,否则报0x1008由于零位未知(未归位)而导致的错误。
– MC_MoveLinearAbsolute 指令可由以下运动控制指令中止:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
MC_GroupDisable
MC_GroupStop
MC_Power
– MC_MoveLinearAbsolute 指令可由以下运动控制指令缓冲:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
– 新的 MC_MoveLinearAbsolute 指令可中止以下主动运动控制指令:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
– 新的 MC_MoveLinearAbsolute 指令可缓冲至以下运动控制指令:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
6. MC_MoveLinearRelative
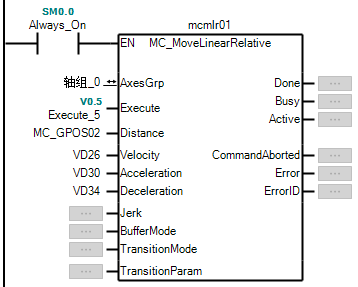
图7 MC_ MoveLinearRelative 指令
功能:让轴组在笛卡尔坐标系进行线性插补,从当前位置运动到指定的相对位置。 该指令支持 2D 和 3D 线性运动。
指令引脚功能参考指令MC_MoveLinearAbsolute
– MC_MoveLinearRelative 指令可由以下运动控制指令中止:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
MC_GroupDisable
MC_GroupStop
MC_Power
– MC_MoveLinearRelative 指令可由以下运动控制指令缓冲:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
– 新的 MC_MoveLinearRelative 指令可中止以下主动运动控制指令:
MC_MoveLinearAbsolute
MC_MoveLinearRelative
– 新的 MC_MoveLinearRelative 指令可缓冲至以下运动控制指令:
MC_MoveLinearAbsolute
MC_MoveLinearRelative

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}