


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART V3.0 运动控制指令简介

发布时间:2025年11月28日
- 0
- 1807
S7-200 SMART V3.0 运动控制指令简介
运动控制变量概览
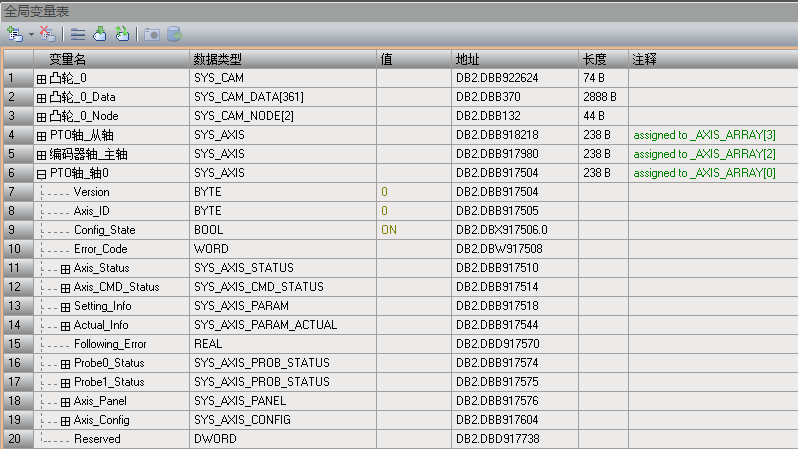
STEP7-Micro/WIN SMART V3 中的全新运动控制遵循 IEC 61131-3 标准。运动控制相关程序中,参数设置和状态信息等数据将作为变量进行处理。
轴变量为系统定义的变量,由轴参数、当前位置和错误信息等监视信息组成。通过 STEP7-Micro/WIN SMART V3 创建轴时,轴变量按照创建的顺序注册在全局变量表中。
轴变量的数据类型为结构类型,而其数据名称为“轴_x”。
• 轴变量
用于处理从伺服器驱动、编码器输入端子、位置接口单元以及虚拟伺服器驱动和编码器输入的变量。
– STEP7-Micro/WIN SMART V3 创建的变量名称为:轴_0 - 轴_15。
• 凸轮变量
用于处理主轴和从轴位置之间关系的变量。
– STEP 7-Micro/WIN SMART V3 创建的变量名称为:凸轮_0 - 凸轮_7,凸轮_0_Data - 凸轮_7_Date,凸轮_0_Node - 凸轮_7_Node。
系统运动控制变量表如下图所示:
基本指令
STEP7-Micro/WIN SMART V3运动控制基本指令如下图所示:
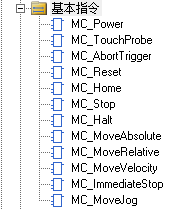
每个指令的功能如下表所示:
| 控制指令 | 使能 | MC_Power |
| 错误确认 | MC_Reset | |
| 停止 | MC_Halt/Stop/ImmediateStop | |
| 定位指令 | 回参考点 | MC_Home |
| 相对定位 | MC_MoveRelative | |
| 绝对定位 | MC_MoveAbsolute | |
| 速度指令 | 点动 | MC_MoveJog |
| 以设定的速度移动 | MC_MoveVelocity | |
| 其他指令 | 探针 | MC_TouchProbe |
| 取消探针 | MC_AbortTrigger |
凸轮和齿轮指令
STEP7-Micro/WIN SMART V3运动控制凸轮和齿轮指令如下图所示:
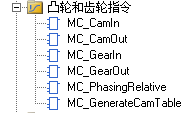
每个指令的功能如下表所示:
| 凸轮指令 | 启动凸轮运行 | MC_CamIn |
| 解除MC_CamIn凸轮 | MC_CamOut | |
| 修改凸轮表 | MC_GenerateCamTable | |
| 齿轮指令 | 启动齿轮运行 | MC_GearIn |
| 解除MC_GearIn齿轮 | MC_GearOut | |
| 偏移指令 | 偏移指令相位 | MC_PhasingRelative |
轴组指令
STEP7-Micro/WIN SMART V3运动控制轴组指令如下图所示:
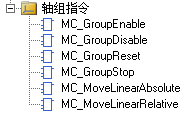
每个指令的功能如下表所示:
| 控制指令 | 使能/取消使能 | MC_GroupEnable/GroupDisable |
| 错误确认 | MC_GroupReset | |
| 停止 | MC_GroupStop | |
| 定位指令 | 相对定位 | MC_MoveLinearAbsolute |
| 绝对定位 | MC_MoveLinearRelative |

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}