



















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

运动机构示例

发布时间:2025年12月09日
- 0
- 877
本章节讲解 S7-1200 G2 运动机构应用示例
1 运动控制-运动机构示例
示例任务:编写路径插补程序,实现如图1的轨迹,并使用运动机构的轨迹功能记录运行轨迹。
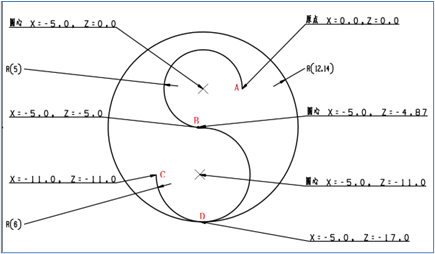
图1 运动路径轨迹
运行轨迹分为以下几部分:
• 从任意位置直线运行到初始位置 (x=0.0,z=0.0)
• “S” 曲线的上半部分 S1 ( 从 A 点到 B 点)
• “S” 曲线的下半部分 S2 ( 从 B 点到 C 点)
• “S” 曲线的下半部分 S3 ( 从 C 点到 D 点)
• 外部圆 S4
2 项目的组态及编写运动程序步骤
2.1 组态工艺对象
(1)创建两个定位轴,并设置为虚拟轴,分别用于 X-Z 平面的路径插补。
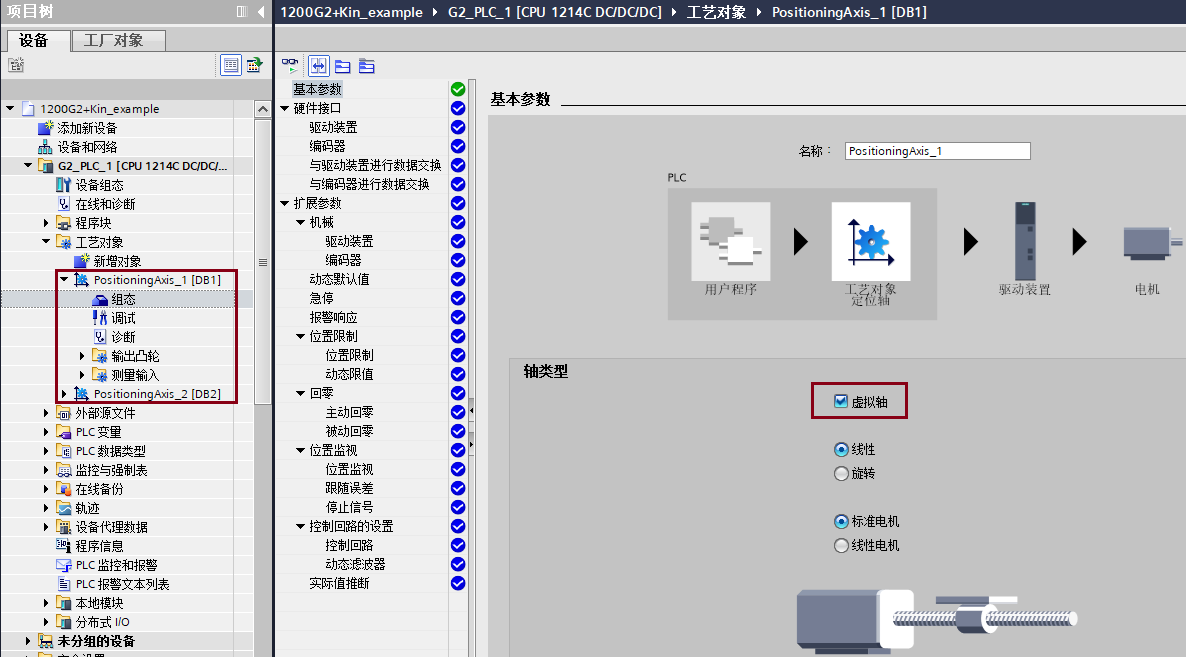
图2 创建两个定位轴
(2)双击“新增对象”,创建运动机构工艺对象。
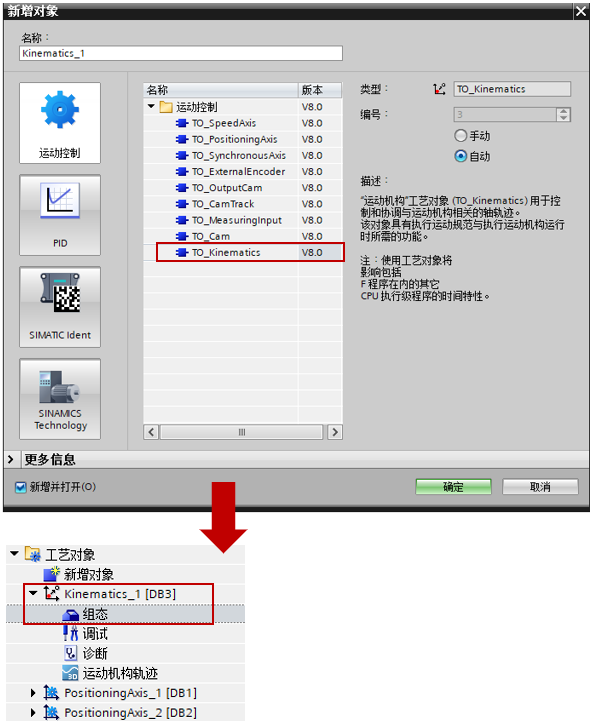
图3 创建运动机构工艺对象
(3)双击“运动机构工艺对象”下的“组态”,设置运动机构类型。
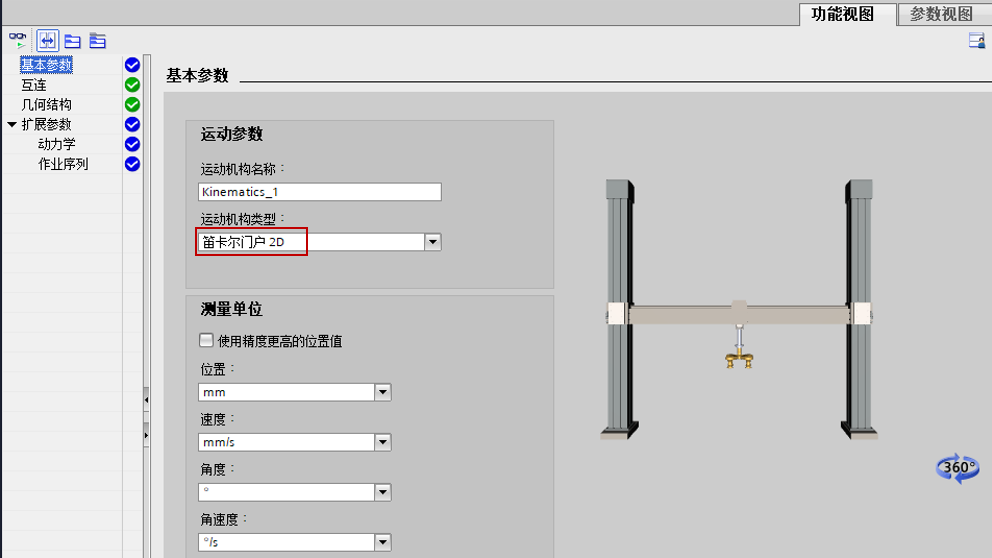
图4 运动机构类型
(4)在“互连”中关联相应的轴。
工艺对象“PositioningAxis_1”关联运动机构轴 A1,执行水平方向的运行;
工艺对象“PositioningAxis_2”关联运动机构轴 A2,执行垂直方向的运行。
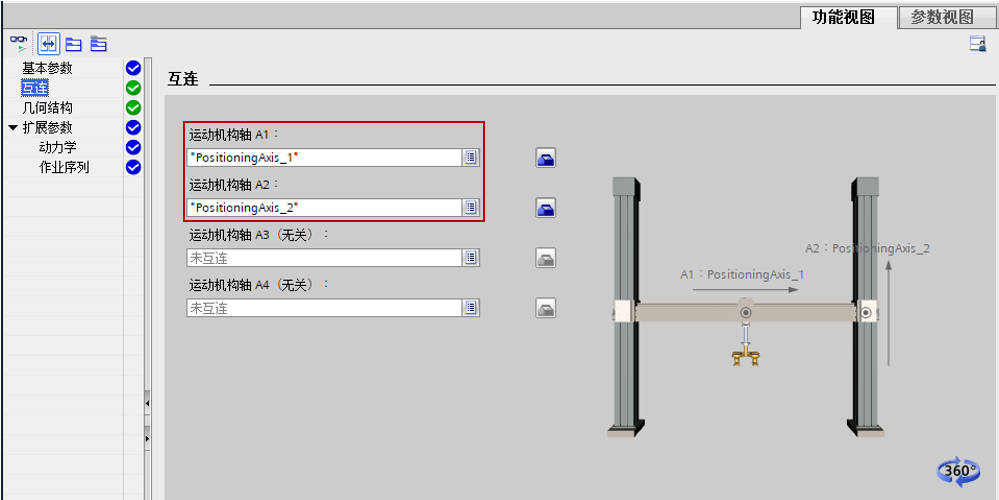
图5 互连运动机构轴
(5)在“几何结构”中设置运动机构的变换参数以及 3D 显示的范围。
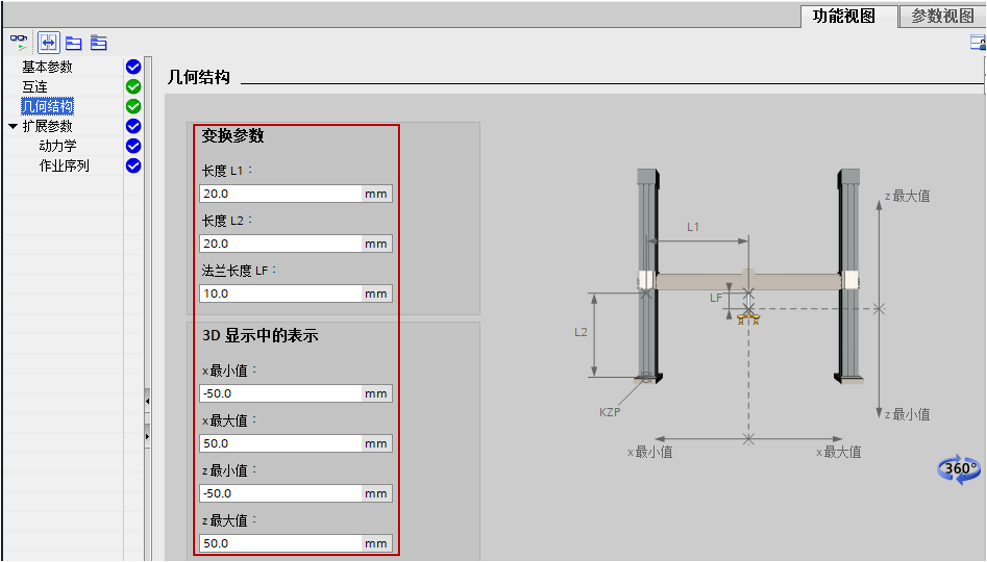
图6 运动机构几何结构
2.2 编写程序
(1)使能两个轴和回零。
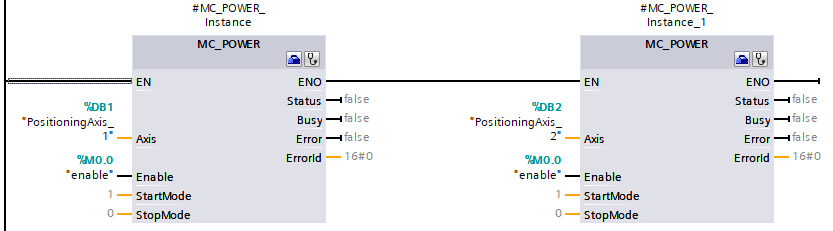
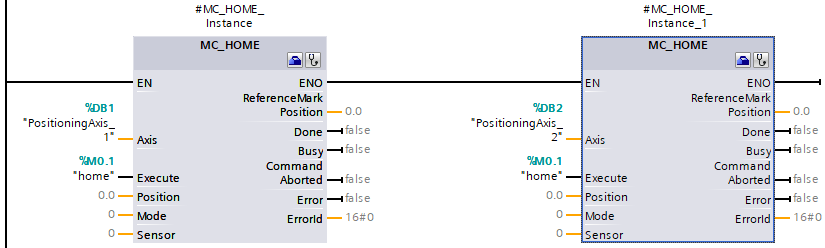
图7 轴使能和回零
(2)复位轴和运动机构。
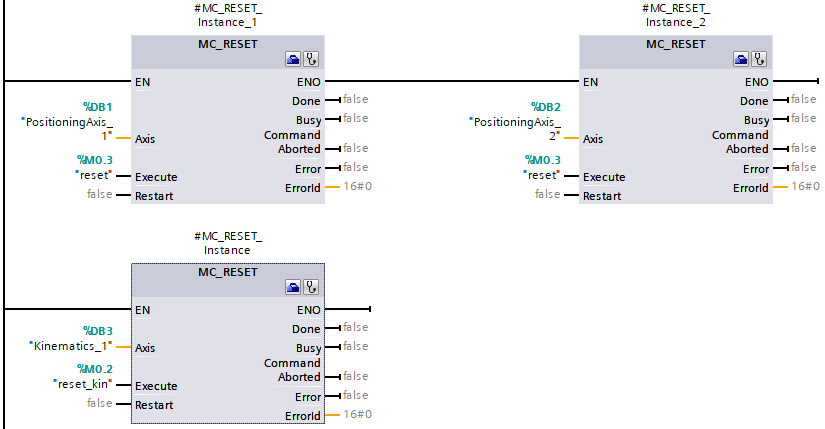
图8 复位轴和运动机构
(3)创建 DB 数据块,预设路径曲线中需要的各位置坐标数据。
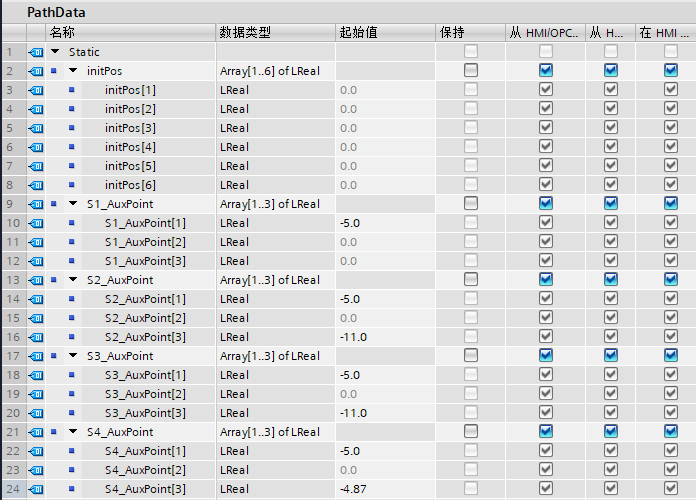
图9 预设路径曲线中的坐标数据
(4)移动到起始点 A。
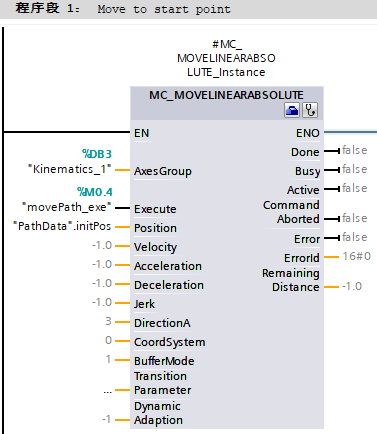
图10 移动到起始点 A
(5)编写画圆弧程序 S1 (S 的上半部分,从 A 到 B)。
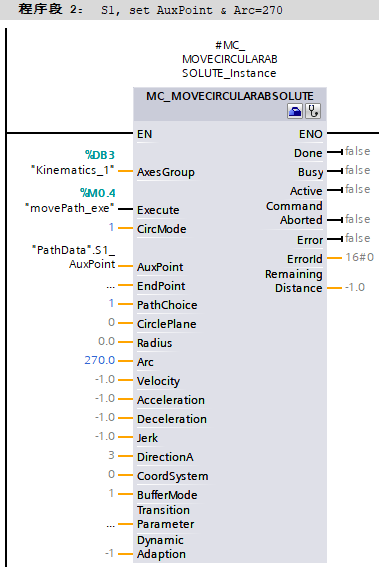
图11 圆弧轨迹 S1
参数说明:
“CircMode”=1:通过圆心和主平面中的角度从当前位置画圆弧,圆心由“Pathdata.S1_AuxPoint”参数指定,圆周运动的角度“Arc”=270,圆周轨迹的终点通过圆心和角度进行计算
“PathChoice”=1:圆周轨迹为负旋转方向
“CirclePlane”=0:X-Z 平面
(6)编写画圆弧程序 S2 (S 的下半部分,从 B 到 C)。
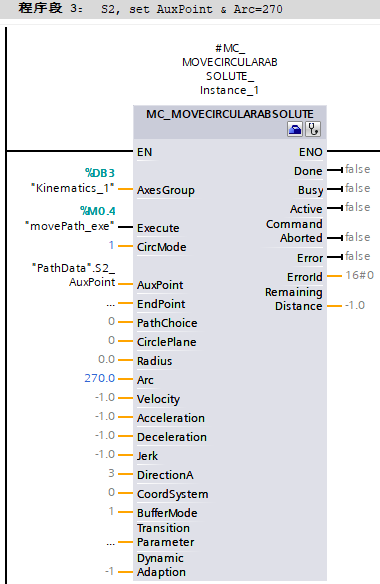
图12 圆弧轨迹 S2
参数说明:
“CircMode”=1:通过圆心和主平面中的角度从当前位置画圆弧,圆心由“Pathdata.S2_AuxPoint”参数指定,圆周运动的角度“Arc”=270,圆周轨迹的终点通过圆心和角度进行计算
“PathChoice”=0:圆周轨迹的方向为正方向
“CirclePlane”=0:X-Z 平面
(7)编写画圆弧程序 S3 (S的下半部分,从C到D )。
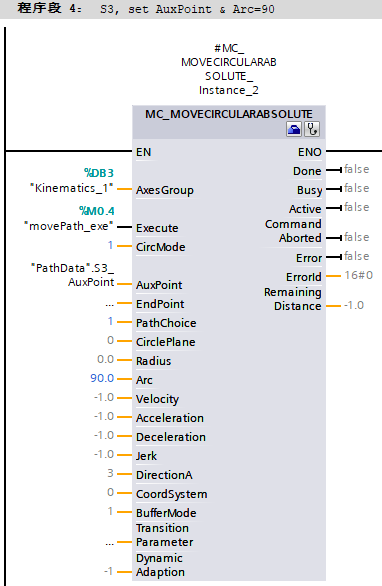
图13 圆弧轨迹S3
参数说明:
“CircMode”=1:通过圆心和主平面中的角度从当前位置画圆弧,圆心由“Pathdata.S3_AuxPoint”参数指定,圆周运动的角度“Arc”=90,圆周轨迹的终点通过圆心和角度进行计算
“PathChoice”=1:圆周轨迹为负旋转方向
“CirclePlane”=0:X-Z 平面
(8)编写画圆程序 S4 (外圆)。
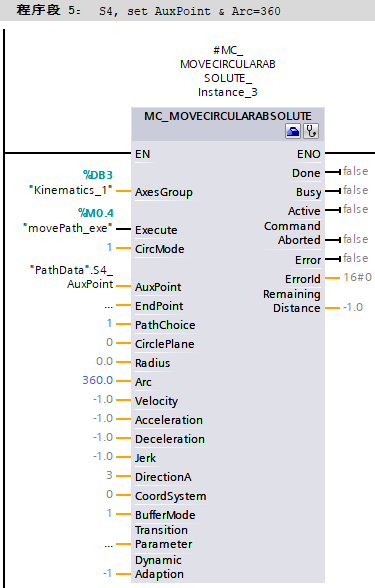
图14 画圆轨迹 S4
参数说明:
“CircMode”=1:通过圆心和主平面中的角度从当前位置画圆弧,圆心由“Pathdata.S4_AuxPoint”参数指定,圆周运动的角度“Arc”=360,圆周轨迹的终点通过圆心和角度进行计算
“PathChoice”=1:圆周轨迹为负旋转方向
“CirclePlane”=0:X-Z 平面
注:5 个运动指令的触发都使用同一个变量“movePath_exe”,因程序是从上往下执行的,所以,这 5 个指令的任务也是按照程序的先后顺序加载到作业序列中的。
2.3 运动轨迹的跟踪记录
(1)创建变量监控表,顺序置位启动程序。
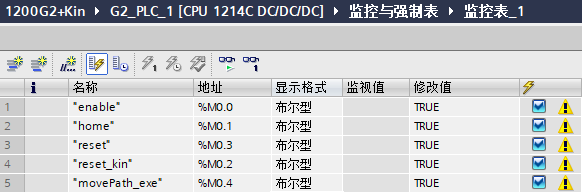
图15 变量监控表
(2)运动机构轨迹监控:双击运动机构工艺对象下的“运动机构轨迹”。
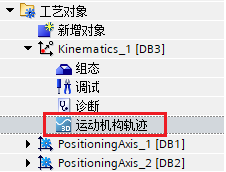
图16启动“运动机构轨迹”
(3)在“组态”界面中进行信号跟踪设置,如下图。
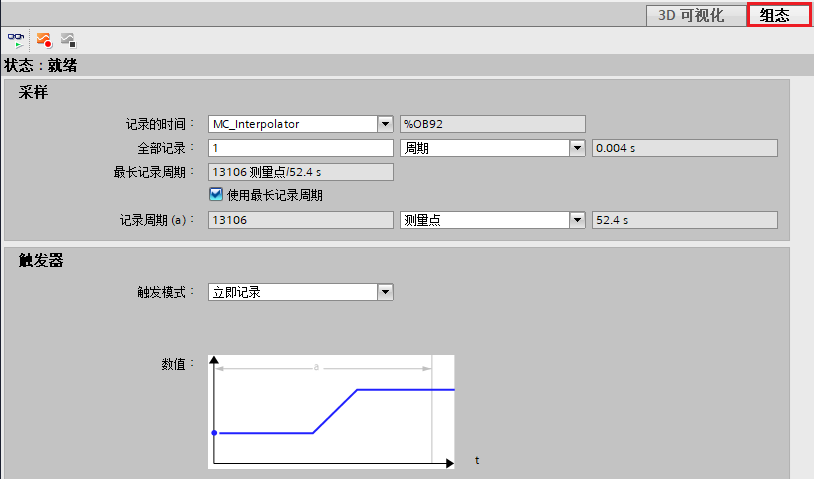
图17 运动机构轨迹—>组态
(4)在“3D 可视化”界面中单击“记录”按钮,跟踪路径曲线轨迹如下。
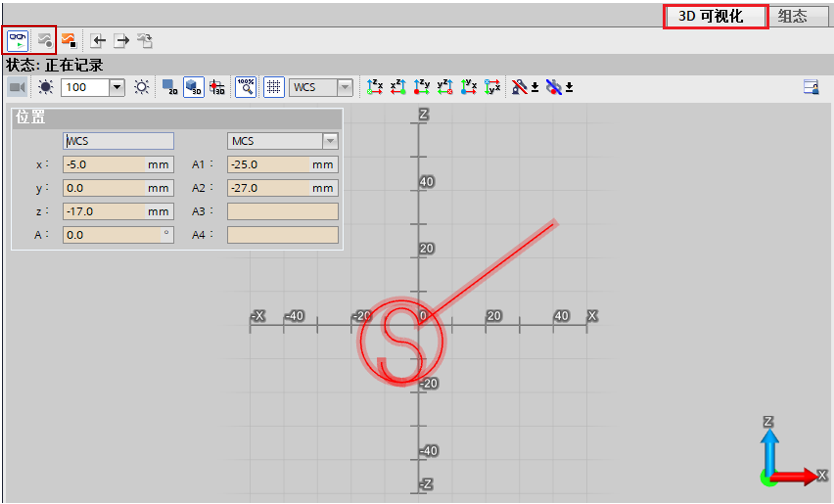
图18 录制路径轨迹

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}