


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

虚拟轴和仿真轴

发布时间:2025年12月09日
- 0
- 870
本章节讲解 S7-1200 G2 虚拟轴和仿真轴
运动控制-实际轴、虚拟轴和仿真轴的定义
1. 实际轴
实际轴是实际存在的物理轴,通常由电机和驱动装置组成,它是机械系统中的实际运动部分,用于实际驱动机械部件进行运动。通过伺服控制器向电机提供适当的电流或电压信号,控制电机的转动,从而实现精确的位置控制和运动。实际轴控制原理框图如图1所示。
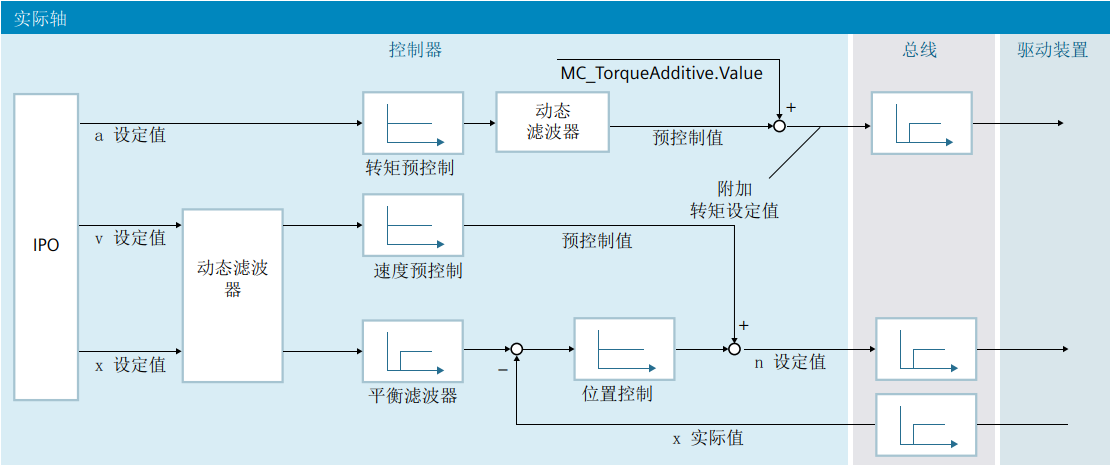
图1 实际轴控制原理图
2. 虚拟轴
虚拟轴是一种通过软件编程模拟的轴,不是实际的物理轴。它在实际机械系统中并不存在,仅存在于控制系统中。虚拟轴用于对多轴协调运动和复杂的运动轨迹进行描述和控制,实现对多个实际轴(跟随轴)的运动进行同步,实现复杂的运动控制和路径规划。
3. 仿真轴
在配置有实际轴的控制系统中,例如,在调试期间,相关硬件组件暂不可用,但需要对设备应用进行具体编程,临时将实际轴配置为仿真轴实现对轴运动的仿真,在仿真调试期间,不会发生轴运动。
下文主要对虚拟轴和仿真轴的功能区别和应用场合进行说明。
虚拟轴功能
S7‑1200 G2 固件 V1.0.2 的运动控制功能 V8.0,可将速度轴、定位轴或同步轴配置为虚拟轴。设定值仅在控制器内进行处理。在这种情况下,绝不会控制实际驱动器。原理图如图2所示。
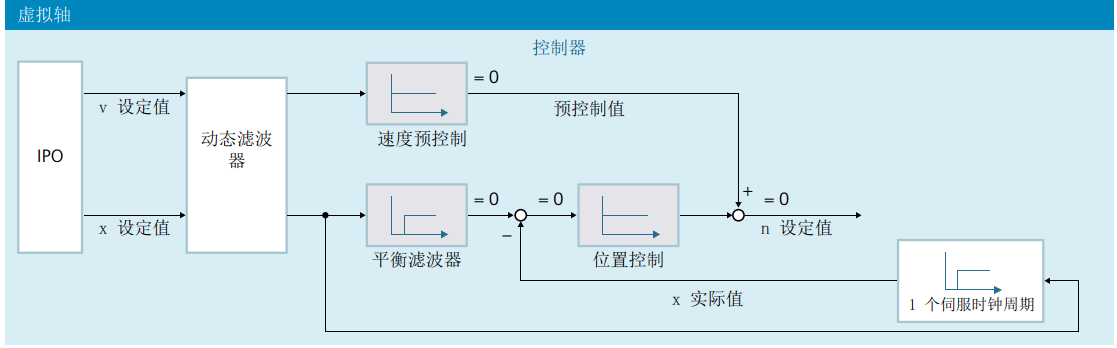
图2 虚拟轴原理图
1. 虚拟轴计算实际值
- 虚拟轴的实际值直接采用位置和速度的设定值,并具有应用周期延迟。
- 反馈回路和驱动模型未进行仿真。
- 动态滤波器激活。
- 控制回路的配置(速度预控,平衡滤波器和位置控制)未生效。
2. 虚拟轴操作期间的行为
- 在虚拟轴中,可使用工艺对象测量输入、输出凸轮和凸轮轨迹。
- 虚拟轴不会将设定值输出到驱动器中,也不会读取编码器的任意实际值。
- 硬限位开关和零位置开关不产生任何影响。
- 配置的报警响应“取消启用”不会输出到驱动器。
3. 应用场合
- 作为引导轴用于与实际跟随轴的同步应用。
- 适用于使用软件测试轴的运动指令功能。
4. 更改为“虚拟轴”注意事项
之前配置为实轴或仿真轴的工艺对象,如需更改为“虚拟轴”,只能在 CPU STOP 模式下,才能将“虚拟轴”配置下载到 CPU 中。
仿真轴功能
S7‑1200 G2 固件 V1.0.2 的运动控制功能 V8.0,可将速度轴、定位轴或同步轴配置为仿真轴。在仿真模式下, CPU 中无需连接驱动装置和编码器就可以仿真轴的运动。实际值通过控制回路和简化的驱动模型生成。原理图如图3所示。
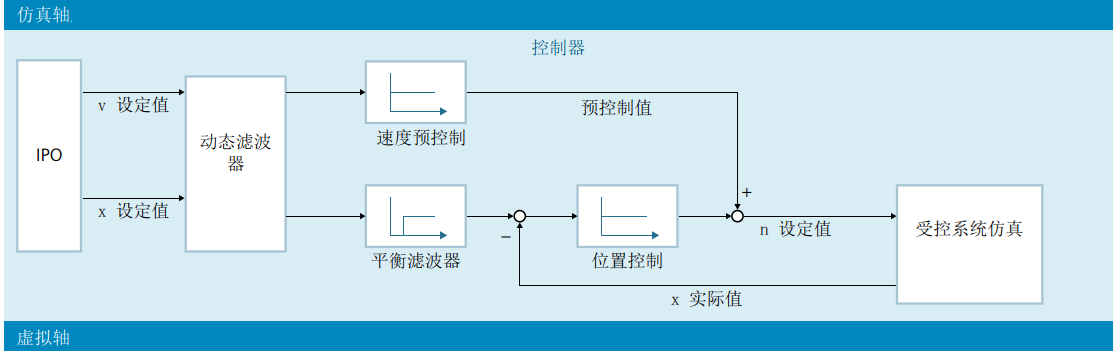
图3 虚拟轴原理图
1. 仿真轴计算实际值
- 仿真轴的实际值是通过设定值的时间延时生成的。延时时间如图4。
- 对反馈回路和驱动模型进行仿真。
- 动态滤波器激活。
- 控制回路的配置(速度预控,平衡滤波器和位置控制)生效。
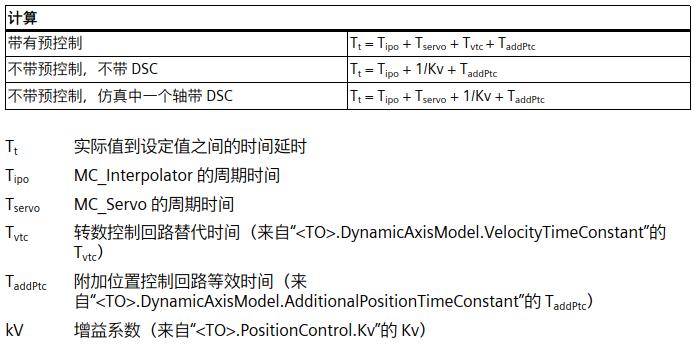
图4 从实际值到设定值之间的时间延时(Tt)
2. 仿真轴操作期间的行为
- 在仿真轴中,可使用工艺对象测量输入、输出凸轮和凸轮轨迹。
- 仿真轴不会将设定值输出到驱动器中,也不会读取编码器的任意实际值。
- 硬限位开关和零位置开关不产生任何影响。
- 配置的报警响应“取消启用”不会输出到驱动器。
3. 应用场合
- 例如,对轴进行仿真,从而对设备应用进行具体编程,随后在调试时将其分配给所配置的硬件设备
- 例如,在调试期间,并非所有硬件组件都可用。
- 在调试期间,不可发生轴运动。
4. 更改为“仿真轴”注意事项
激活仿真模式时,在轴配置中无需配置驱动装置和编码器的连接,例如,如果此时驱动装置配置尚不可用。在运行用户程序时,可对“仿真”配置进行更改 <TO>.Simulation.Mode(1= 仿真模式;0= 退出仿真模式)。退出仿真模式时,需对驱动装置和编码器进行有效连接。

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







{{item.nickName}}