


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

S7-200 SMART G2 V3.2 齿轮和凸轮-MC_CamIn

发布时间:2026年04月09日
- 0
- 202
S7-200 SMART G2 V3.2 齿轮和凸轮-MC_CamIn介绍
MC_CamIn 激活相对齿轮同步
功能: 本指令可使相位(主轴)和位移(从轴)按照凸轮表进行同步凸轮动作。由本指令指定的凸轮表,必须事先使用凸轮编辑器制作,并下载到 PLC 中。。
MC_CamIn 指令中主轴和从轴所支持的轴类型:
| 从轴 | 主轴 | |||
|---|---|---|---|---|
| IRT | PTO | Virtual | Encoder | |
| IRT | ✓ 1 | - | ✓ | ✓ |
| PTO | - 2 | ✓ | ✓ | ✓ |
| Virtual 虚拟轴 | ✓ | ✓ | ✓ | ✓ |
1 “ ✓ ” 表示该轴类型受支持。
2 “ - ” 表示该轴类型不受支持。
注意:
由于 PTO 控制的轴与通过 IRT 通信的轴无法实现严格同步,即使通过虚拟轴进行齿轮级联(例如 IRT 轴 → Virtual → PTO 轴),也无法确保 IRT 和 PTO 之间的精确同步。

指令引脚定义
| 参数 | 声明 | 数据类型 | 初始值 | 说明 |
|---|---|---|---|---|
| MasterAxis | IN_OUT | SYS_AXIS | - | 引用主轴 |
| SlaveAxis | IN_OUT | SYS_AXIS | - | 引用从轴 |
| CamTable | IN_OUT | SYS_CAM | - | 引用凸轮表 |
| Execute | IN | BOOL | - | 上升沿处开始指令 |
| Periodic | IN | BOOL | False | 指定是周期执行指定凸轮表还是仅执行一次。 • TRUE:周期 • FALSE:非周期 |
| StartMode 1 | IN | WORD | 0 | 指定 MasterStartDistance 的坐标。 • 0:绝对位置 • 1:相对位置 |
| StartPosition | IN | REAL | 0.0 | 指定凸轮表的起点(0 相位) |
| MasterStartDistance 1 | IN | REAL | 0.0 | 指定轴开始凸轮运动时主轴的位置 |
| MasterScaling | IN | REAL | 1.0 | 以指定的比例放大/缩小主轴的相位。 |
| SlavingScaling | IN | REAL | 1.0 | 以指定的比例放大/缩小从轴的位移。 |
| MasterOffset 1 | IN | REAL | 0.0 | 主轴表的偏移量,主轴至凸轮的角偏移量。 |
| SlaveOffset 1 | IN | REAL | 0.0 | 从轴表的偏移量,锐化的凸轮(即更高的凸起和更深的凹陷)。 |
| ReferenceType 2 | IN | BYTE | 0 | 指定主轴的位置类型。 • 0:指令位置(同一任务周期下的计算值) • 1:反馈位置(同一任务周期下获取的主轴反馈位置) 当使用 Reference Type = 1 的非周期凸轮时,必须设置滞后值。这是为了防止由于 actual position 的波动,导致 CamIn 触发 EOP ,引起凸轮同步退出。 • 2:指令位置(上个任务周期下的计算值) |
| Direction | IN | BYTE | 0 | 主轴沿指定方向移动时,从轴凸轮移动。仅当主轴按指定方向反向移动时,从轴凸轮才会停止。 • 0:正方向 • 1:负方向 • 2:未指定方向 |
| BufferMode | IN | BYTE | 0 | 指定执行多个运动指令时的行为 • 0:打断模式 • 1:缓冲模式 |
| InCam | OUT | BOOL | False | 执行凸轮表起点时为 TRUE |
| StartSync | OUT | BOOL | False | 从轴追赶主轴的行为 • 0:从轴没有追赶主轴 • 1:从轴开始追赶主轴,还未追上(未进入同步状态) |
| InSync | OUT | BOOL | False | 从轴与主轴同步时为 TRUE |
| EndOfProfile | OUT | BOOL | False | 执行凸轮表终点时为 TRUE |
| Busy | OUT | BOOL | False | 指令未结束 |
| Active | OUT | BOOL | False | 表示该指令可对轴进行控制 |
| CommandAborted | OUT | BOOL | False | Command 被另一个命令中止 |
| Error | OUT | BOOL | False | 表示指令内发生了错误 |
| ErrorID | OUT | WORD | 0 | 错误代码 |
1 PTO: 这四个参数的输入的值不会生效,使用默认参数。StartMode 的默认值为 1(相对运动模式),而其它参数的默认值为 0.0。
2 当从轴为 PTO 时,不支持设置此参数,默认为 0。当从轴为虚轴时,设置为 1 等同于设置为 0。
前置条件
- 主轴和从轴已正确组态。
- 通过用户程序中的 MC_Power 成功使能从轴。
注意事项
- 使用 MC_CamIn 时,尽量不要在主轴上执行 MC_Home 或 MC_ImmediateStop 指令。在主轴上执行 MC_Home/MC_ImmediateStop 指令可能导致从轴快速跟踪,这种情况十分危险。 如果希望在主轴上使用 MC_Home/MC_ImmediateStop 指令,在执行该指令之前解除主轴与从轴之间的关系。
- 对于使用实际值作为参考类型(ReferenceType=1)的单向凸轮,建议您在主轴“实际值推断”页面中设置合适的滞后值。
MC_CamOut 解除相对齿轮同步
作用:解除 MC_CamIn 凸轮行为,减速停止轴

说明:
- 从 STEP 7 Micro/WIN SMART V3 (3.2 版) 开始,MC_CamOut 功能的 Jerk 参数将生效,且适用于所有轴类型。
- MC_CamOut的Done位,对于IRT轴: 轴处于standstill时。对于PTO轴、虚轴:速度为0时。
启用凸轮移动
发出启动命令后,等待主轴到达 StartPosition(凸轮表的起始位置)。
当主轴通过 StartPosition 时,执行凸轮表的起始点,输出变量 InCam(凸轮移动进行中)变为 1。
凸轮表的相位和位移被指定为相对于零点的相对值。因此,每个轴在每个相位的绝对位置都是基于凸轮表每个轴的起点绝对位置的相对值。例如,主轴模式为 0 ~ 360° 的旋转模式,StartPosition 为 60°。如下图所示,主轴的绝对位置为凸轮表的相位加上 StartPosition 的值,从轴的绝对位置为凸轮表的位移加上凸轮表起点处从轴的绝对位置。
对于凸轮表,其相位和位移均以起点 “0.0” 起的相对量制定。关于主轴,从轴的指令位置,则以直线方式对两个凸轮数据之间进行插补,求得相当于相位(主轴)的位移(从轴)。凸轮数据数量较少时,相位间隔增大,表现为精度较低的凸轮动作。相反,凸轮数据较多时,相位间隔减少,表现为精度较高的凸轮动作。
StartPosition 指定凸轮表的起点(0相位)
达到 StartPosition 的判断条件
- 主轴绝对位置穿越 StartPosition(包括正向穿越和负向穿越)
- 主轴绝对位置正好在 StartPosition 上

MasterStartDistance 指定跟随轴开始凸轮运动时主轴的位置
注意:PTO功能不支持MasterStartDistance
主轴通过 MasterStartDistance(主轴跟踪距离)时,开始从轴的凸轮动作,输出变量 StartSync(开始追赶)变 1。MasterStartDistance 以绝对位置或 StartPosition(凸轮表起始位置) 起的相对距离来指定。绝对位置或相对位置通过 StartMode(起始位置指定方式)来设定。
MasterStartDistance 和 StartPosition 不在一个点时, 主轴在 MasterStartDistance 位置时从轴开始追赶。

Periodic 重复模式
Periodic(重复模式)中设置了 TRUE [重复] 时,凸轮移动将从凸轮表的起点到终点重复执行。
设置了 FALSE [无重复] 时,凸轮运动会在继续执行到凸轮表终点时结束。
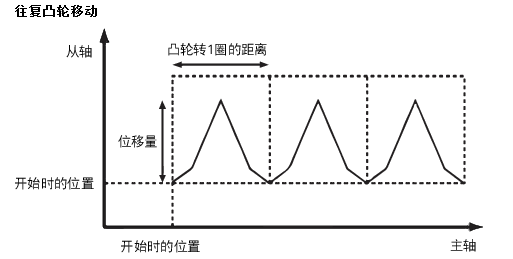
如果从轴在凸轮表的起点和终点处的行程位置相同,则将以往复凸轮方式运动(请参见往复凸轮运动)。
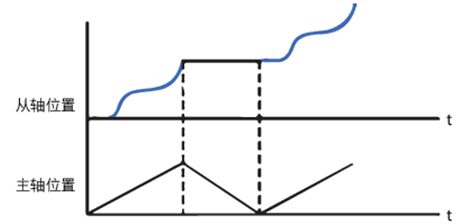
如果从轴在凸轮表的起点和终点处的行程位置不同,则将以传送凸轮方式运行(请参见传送凸轮移动)。
下图中,水平轴显示了主轴位置,垂直轴显示了从轴位置。

缩放和偏移凸轮
注意:PTO功能不支持偏移
下图展示了缩放和移动凸轮的一般顺序:

- 系数(缩放)
针对指定凸轮表的主轴相位、从轴位移,可按照指定比例进行缩放。
主轴、从轴都可以设定不同的倍率。

- 偏置
针对指定凸轮表,可按照偏置量移动相位和位移的功能。 对主轴相位、从轴位移可指定不同的偏置量。
- MasterOffset(主轴偏置)> 0 时:

- MasterOffset(主轴偏置)< 0 时:

- SlaveOffset(从轴偏置)> 0 时:

- SlaveOffset(从轴偏置)< 0 时:

Direction 方向
只有当主轴移动方向与 Direction 相同时,才可启动从轴的凸轮移动。
Direction 在 InSync 为 1 时才有效。
未指定方向
无论主轴朝正方向或负方向运动,凸轮都会开始移动。

正方向
主轴正向移动时,凸轮开始移动。
指定为负方向
主轴负向移动时,凸轮开始移动。

EndofProfile
组态 EndofProfile 引脚时,请注意以下几点:
- 对于非周期凸轮,在凸轮周期结束时, Endofprofile 将置位为 TRUE 并保持。
- 对于周期凸轮,在每个凸轮周期结束时,将置位 1 个扫描周期。
- PTO: EndOfProfile 相对于凸轮表终点最大提前 24 ms。
- IRT: EndOfProfile 相对于凸轮表终点不会提前,滞后最大不超过 2 个 IRT 周期。
从轴的超速行为
| 轴类型 | 同步状态之前(超速行为) | 达到同步状态之后 |
|---|---|---|
| PN IRT 轴 虚轴 | 当从轴发生超速时,系统将立即进入追赶状态。从轴会加速以追赶主轴,直至重新达到同步状态。 | • 从轴超速后,将以轴配置中设定的最大速度持续运行。 • 此时,StartSync 标志位被置为1,InSync 标志位被置为0,EOP (End of Path) 标志位被置为0。其他参数保持不变。从轴的 TO 中的 VelLimit 标志位将被置为 1,表示速度限制已激活。 • 一旦主从轴再次进入同步状态,StartSync 标志位将被置为0,InSync 标志位将被置为1。同时,从轴 TO 中的 VelLimit 标志位将被置为0,系统恢复正常的同步运行状态。 • 如果从轴在超速运行期间,主轴到达了 EOP 点,从轴将继续追赶至该 EOP 点。 • 从轴到达 EOP 点后,将退出 CamIn 模式,并且 EOP 标志位将被置为 1(此行为类似于其他指令的 Done 位)。 |
| PTO 轴 | 当从轴发生超速时,系统将立即报错并退出当前操作。 |

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}