

















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

MAP库移植

发布时间:2024年01月12日
- 0
- 383
MAP库移植介绍
MAP库移植
S7-200 MAP 库移植至 S7-200 SMART 运动控制,移植时需要在 S7-200 SMART 中通过运动控制向导编程。
测量系统移植
1、如果 MAP 库使用相对脉冲,S7-200 SMART 运动控制向导的测量系统选择相对脉冲,如图1:
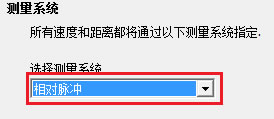
图1. 选择测量系统
2、S7-200 SMART 运动控制向导的方向控制根据实际情况可以选择“单相(1个输出)”或者“单相(2个输出)”,如图2:
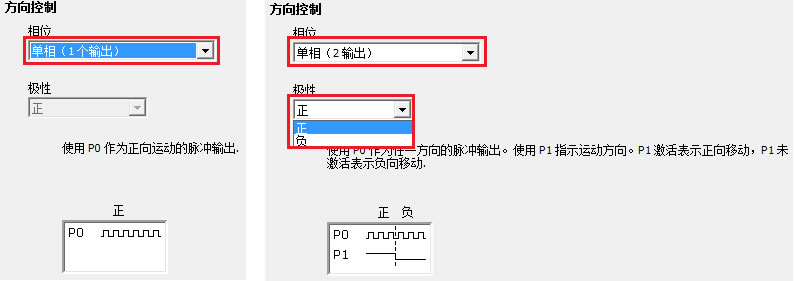
图2. 选择方向控制
3、如果 MAP 库使用工程量,S7-200 SMART 运动控制向导的测量系统选择工程单位,如图3所示:
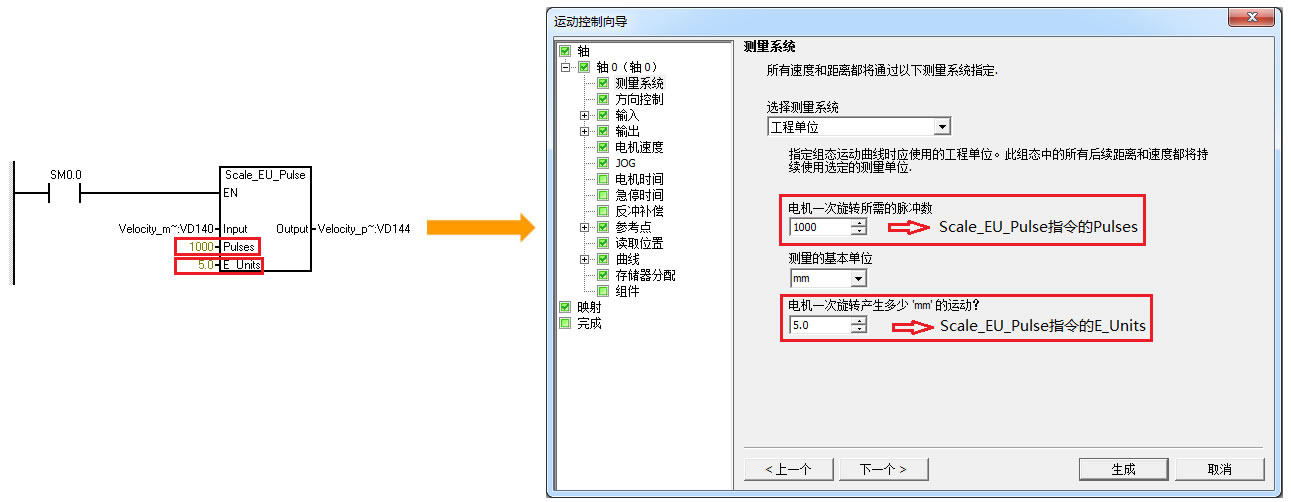
图3. Scale_EU_Pulse指令移植
4、最大速度和启动/停止速度在S7-200 SMART运动控制向导中设置,如图4所示:
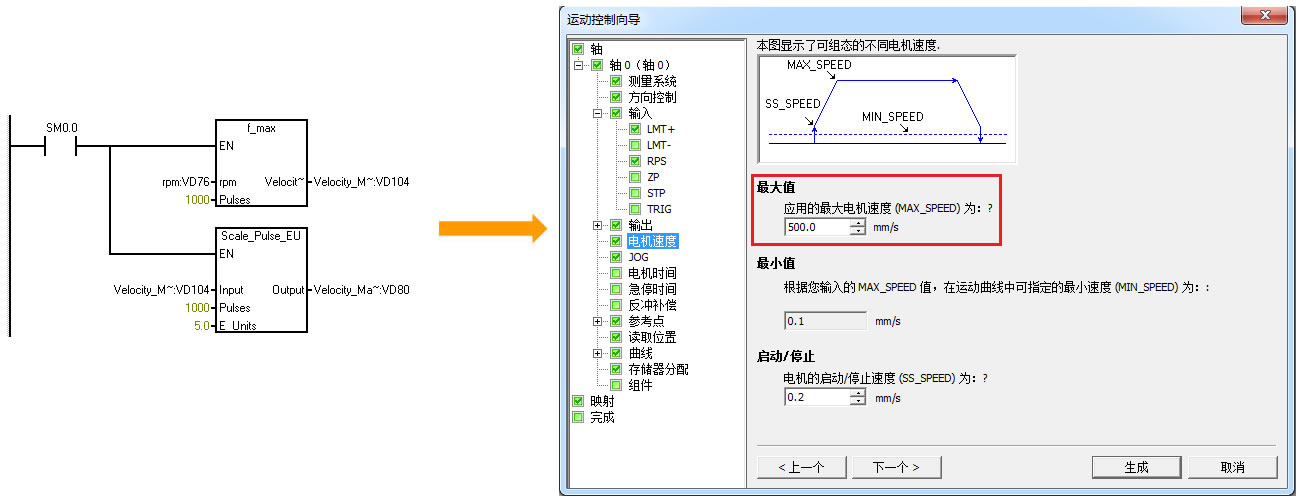
图4. 最大速度
5、加减速时间在 S7-200 SMART 运动控制向导中设置,如图5所示:
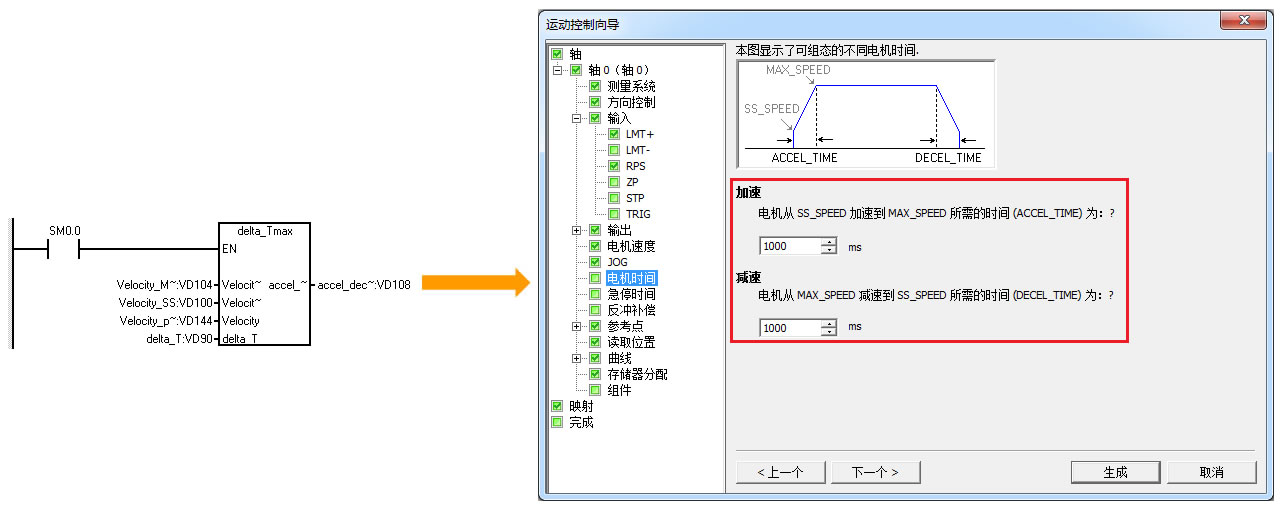
图5. 加减速时间
CTRL指令移植
Q0_X_CTRL指令由AXISx_CTRL指令替换,如图6所示:
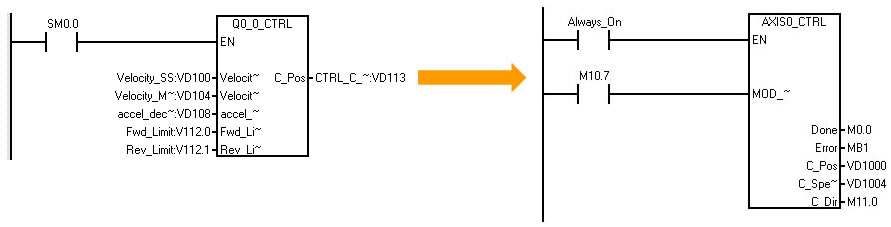
图6. CTRL指令移植
启动/停止速度、最大速度、加减速时间、正限位和负限位,在S7-200 SMART 运动控制向导中设置。
MoveVelocity指令移植
1、使用 Q0_X_MoveVelocity 指令,在运动过程中修改速度,由 AXISx_MAN 指令替换,如图7所示:
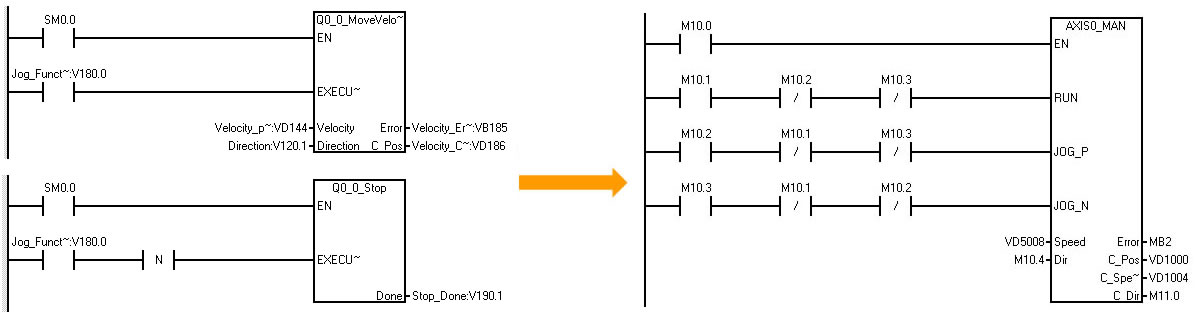
图7. MoveVelocity指令移植
2、使用 Q0_X_MoveVelocity 指令,在运动过程中不需要修改速度,由 AXISx_MAN 指令或者 AXISx_GOTO 指令(正向模式2,反向模式3)替换,如图8所示:
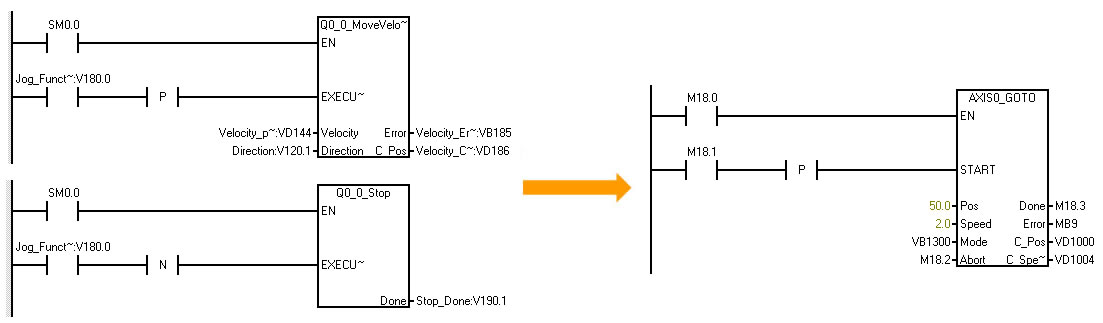
图8. MoveVelocity 指令移植
MoveAbsolute 指令移植
Q0_X_MoveAbsolute 指令由 AXISx_GOTO 指令(模式0)替换,如图9所示:

图9. MoveAbsolute指令移植
MoveRelative 指令移植
Q0_X_MoveRelative 指令由 AXISx_GOTO 指令(模式1)替换,如图10所示:

图10. MoveRelative 指令移植
Q0_X_MoveRelative 指令的方向 Direction(0=反向、1=正向),AXISx_GOTO 指令的 Pos 正数为正向、负数为反向。
Home 指令移植
Q0_X_Home 指令由 AXISx_RSEEK 指令替换,如图11所示:

图11. Q0_X_Home 指令移植
1、Q0_X_Home 指令的 Start_Dir、Final_Dir、Homing_Slow_Spd、Homing_Fast_Spd 需要在 S7-200 SMART 运动控制向导中设置,如图12所示:
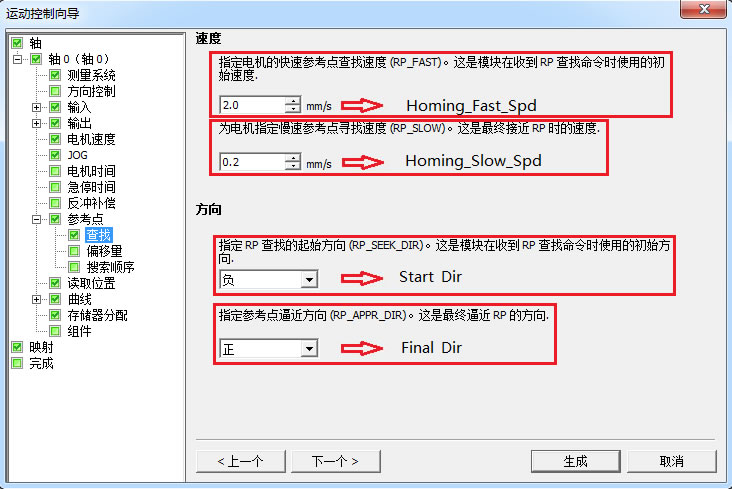
图12. S7-200 SMART 运动控制向导方向、速度设置
2、Q0_X_Home 指令的 Position 需要在 S7-200 SMART 运动控制向导中设置参考点偏移量,如图13所示:
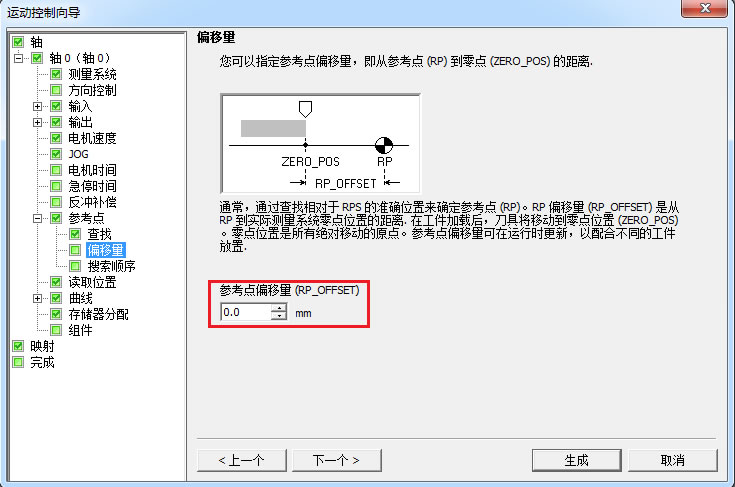
图13. S7-200 SMART 运动控制向导设置参考点偏移量
3、需要在 S7-200 SMART 运动控制向导中设置搜索顺序为1,如图14所示:
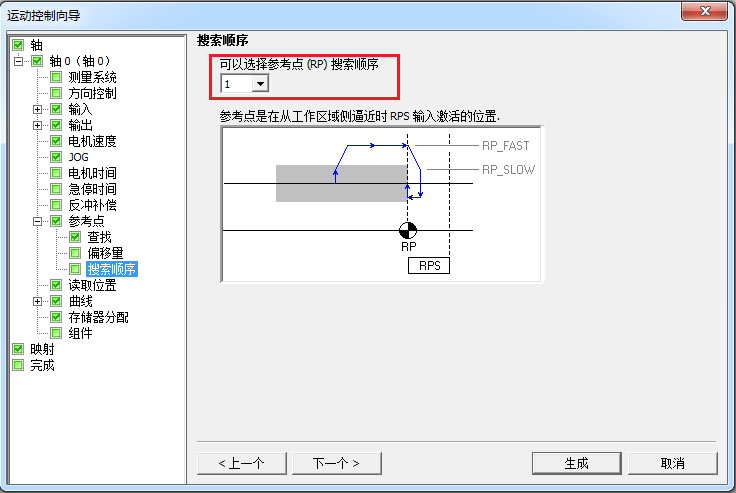
图14. S7-200 SMART 运动控制向导设置搜索顺序
LDPOS 指令移植
Q0_X_LoadPos 指令由 AXISx_LDPOS 指令替换,如图15:

图15. Q0_X_LoadPos 指令移植

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}