



















 官方商城-正品备件
官方商城-正品备件
 DIMOIS
DIMOIS
- {{item.name}}
更多

S7-200 SMART V3.0 MC_CamIn

发布时间:2025年07月18日
- 0
- 1596
S7-200 SMART V3.0 MC_CamIn
S7-200 SMART V3.0 MC_CamIn介绍
MC_CamIn 指令通过使用指定凸轮表实现凸轮同步,同步后从轴会按照凸轮表所规划的凸轮曲线跟随从轴进行运动。
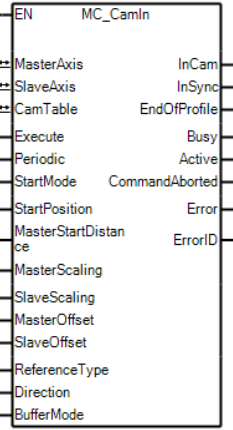
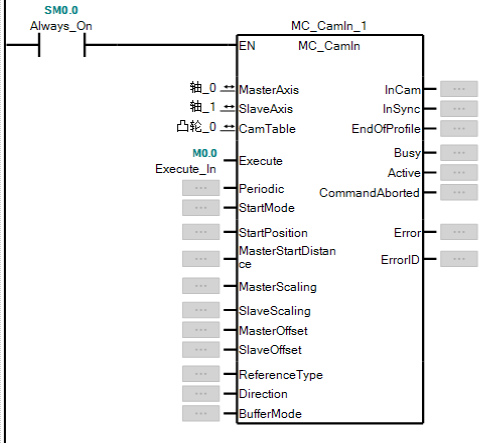
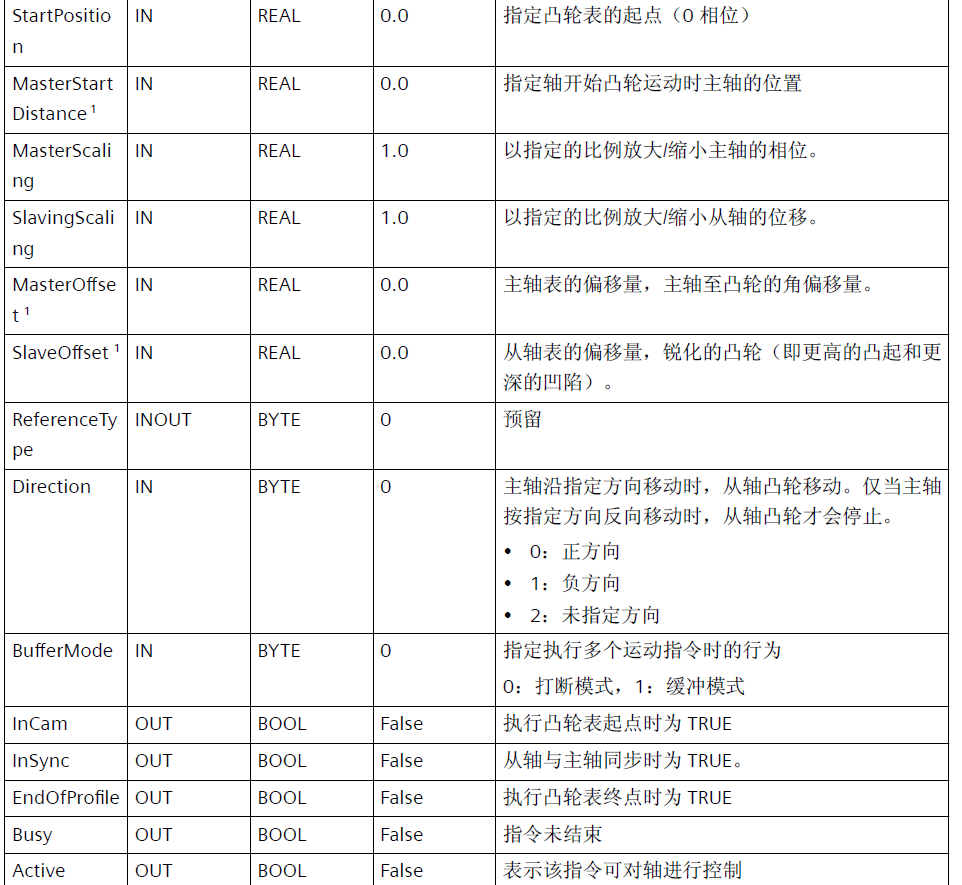
S7-200 SMART V3.0 MC_CamIn指令引脚定义
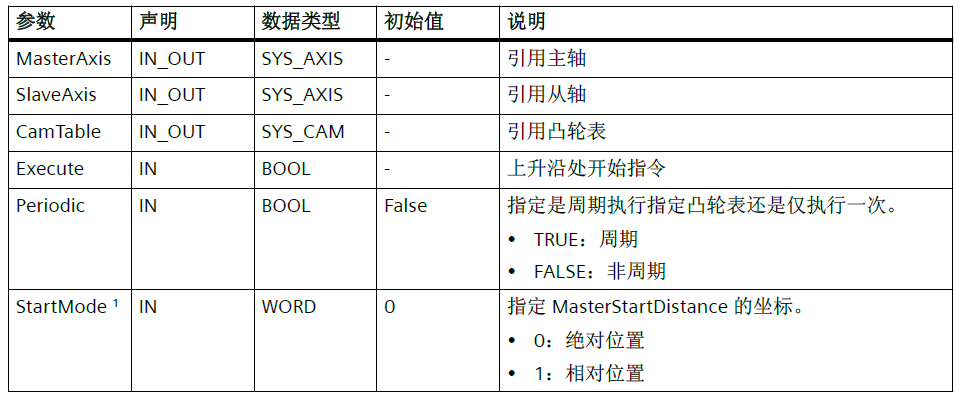

1注:这四个参数现在被保留,输入的值不会生效。StartMode 的默认值为1(相对运动模式),而其他参数的默认值为 0。
说明:
组态 Endofprofile 引脚时,请注意以下几点:
• 对于非周期凸轮,在凸轮周期结束时, Endofprofile 将置位为 TRUE 并保持。
• 对于周期凸轮,在每个凸轮周期结束时,将置位 1 个扫描周期。
• EndOfProfile 相对于凸轮表终点最大提前 24 ms。
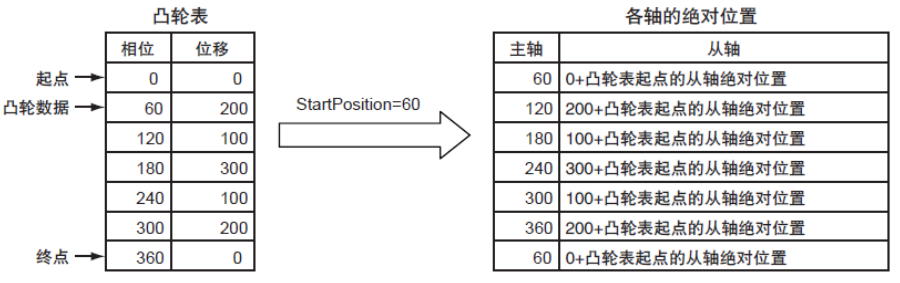
StartPosition功能
例如,主轴计数模式为 0 ~ 360°的旋转模式,凸轮表的 StartPosition 为 60°。如下图所示,主轴的绝对位置为凸轮表的相位加上StartPosition 的值,从轴的绝对位置为凸轮表的位移加上凸轮表中轴起点的绝对位置。
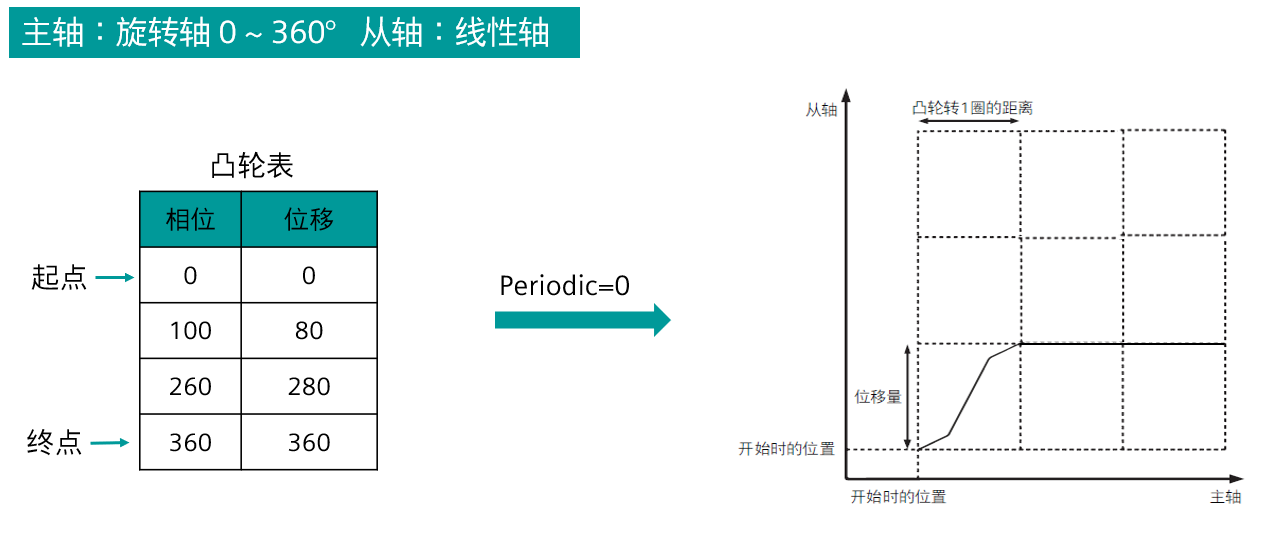
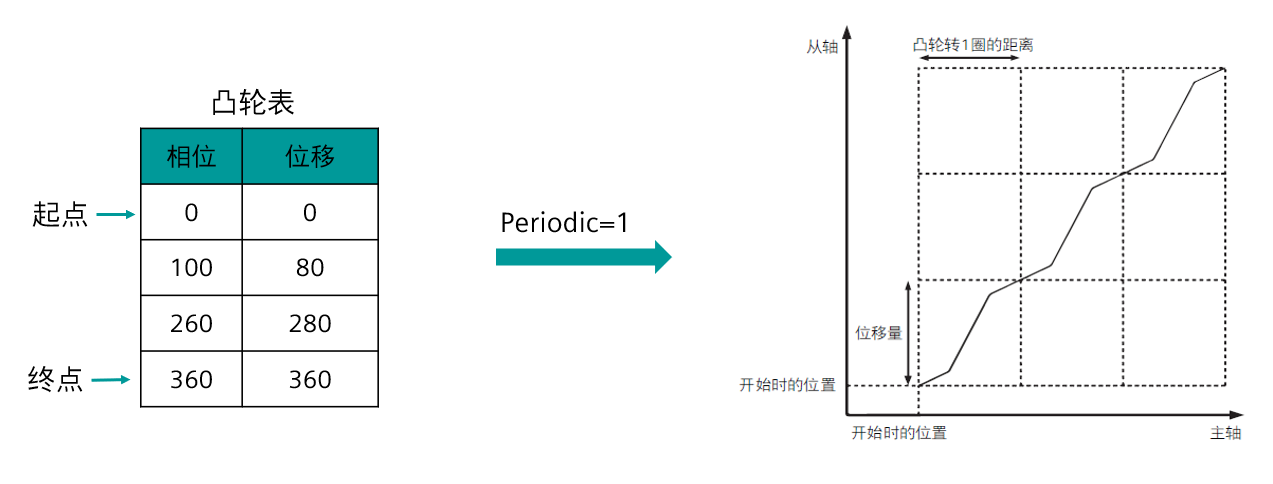
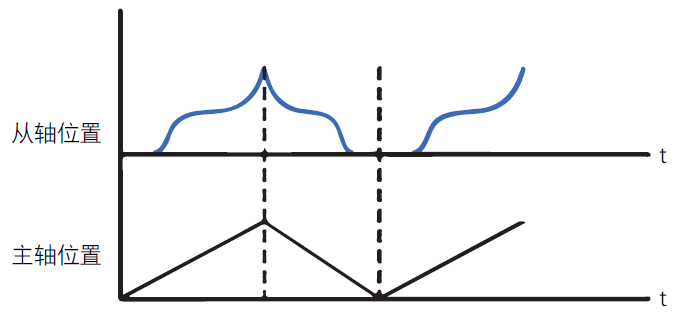
Periodic(重复模式)功能
Periodic(重复模式)中设置了 TRUE [重复] 时,凸轮移动将从凸轮表的起点到终点重复执行。
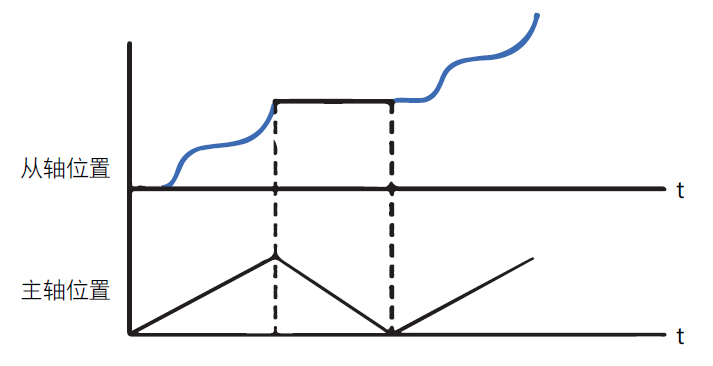
设置了 FALSE [无重复] 时,凸轮运动会在继续执行到凸轮表终点时结束。如下图:
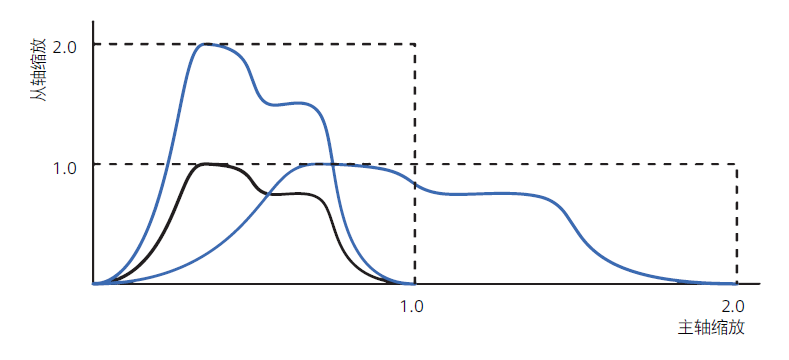
MasterScaling和SlavingScaling系数(缩放)功能
针对指定凸轮表的主轴相位、从轴位移,可按照指定比例进行缩放。主轴、从轴都可以设定不同的倍率。
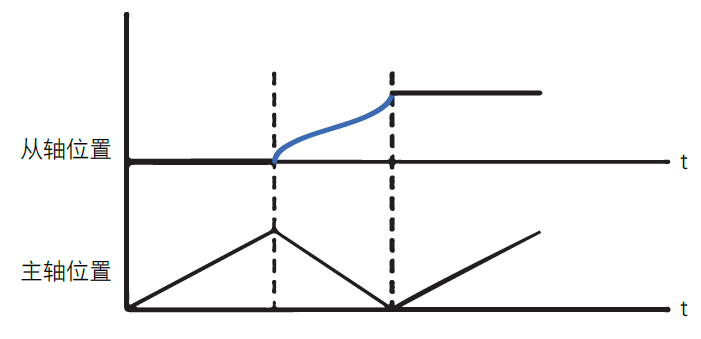
Direction(方向)功能
只有当主轴移动方向与 Direction 相同时,才可启动从轴的凸轮移动。
当选择 Direction 时,表示系统目前处于 InSync 状态。
未指定方向:
无论主轴朝正方向或负方向运动,凸轮都会开始移动。
正方向:
主轴正向移动时,凸轮开始移动。
指定为负方向:
主轴负向移动时,凸轮开始移动。
BufferMode(打断/缓冲模式)功能
MC_CamIn 指令可由以下运动控制指令中止:
MC_Halt
MC_Stop
MC_ImmediateStop
MC_MoveAbsolute
MC_MoveRelative
MC_MoveVelocity
MC_MoveJog
MC_CamIn
MC_GearIn
MC_CamOut
MC_CamIn 指令无法由任何运动控制指令缓冲。
新的 MC_CamIn 指令会中止以下主动运动控制指令:
MC_Halt
MC_MoveAbsolute
MC_MoveRelative
MC_MoveVelocity
MC_MoveJog
MC_CamOut
MC_GearOut
MC_CamIn
MC_GearIn
MC_PhasingRelative
新的 MC_CamIn 指令可缓冲以下运动控制指令:
MC_Halt
MC_MoveAbsolute
MC_MoveRelative

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}