


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

运动机构

发布时间:2025年12月09日
- 0
- 512
本章节讲解 S7-1200 G2 运动机构相关内容
1. 运动机构功能
运动机构通常是指多轴机械系统,它采用多个机械耦合轴带动运动机构的工具中心点 (TCP) 进行运动。S7-1200 G2 通过对运动机构工艺对象的控制,实现各轴的合成工具中心点路径插补运动。路径由线段组成,每个线段可以是线性或圆弧的。由多个独立的路径插补命令组成沿路径的运动机构中心点连续运动。
对于固件版本 V1.0 的 S7-1200 G2 CPU 只支持笛卡尔门户 (Cartesian Portal) 的机械手,最多支持 4 个轴组成的运动机构插补操作。如图1所示。
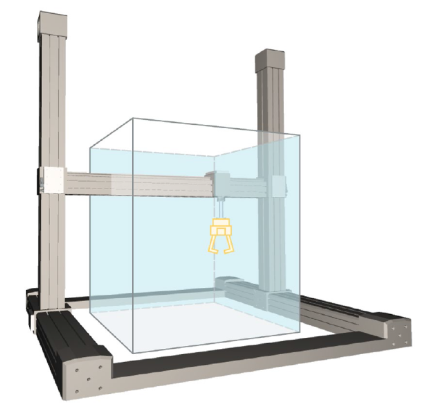
图1 3D 笛卡尔门户(带定位功能)
1.1 运动机构工艺对象的基本工作原理
运动机构工艺对象通过预定义的类型结构,按用户指定的机械尺寸提供运动机构的正逆变换,即运动机构工艺对象根据程序命令中设置的指定目标位置,计算运动机构工具中心点 (TCP) 的运动设定值(考虑动态设置)及运动机构各个轴的运动设定值。在TIA博途软件中,可以创建“定位轴”或“同步轴”工艺对象用于与运动机构工艺对象的互连,运动机构将计算出各个轴的运动设定值传递给相应的定位轴或同步轴,运动机构工艺对象的基本工作原理如图2所示。
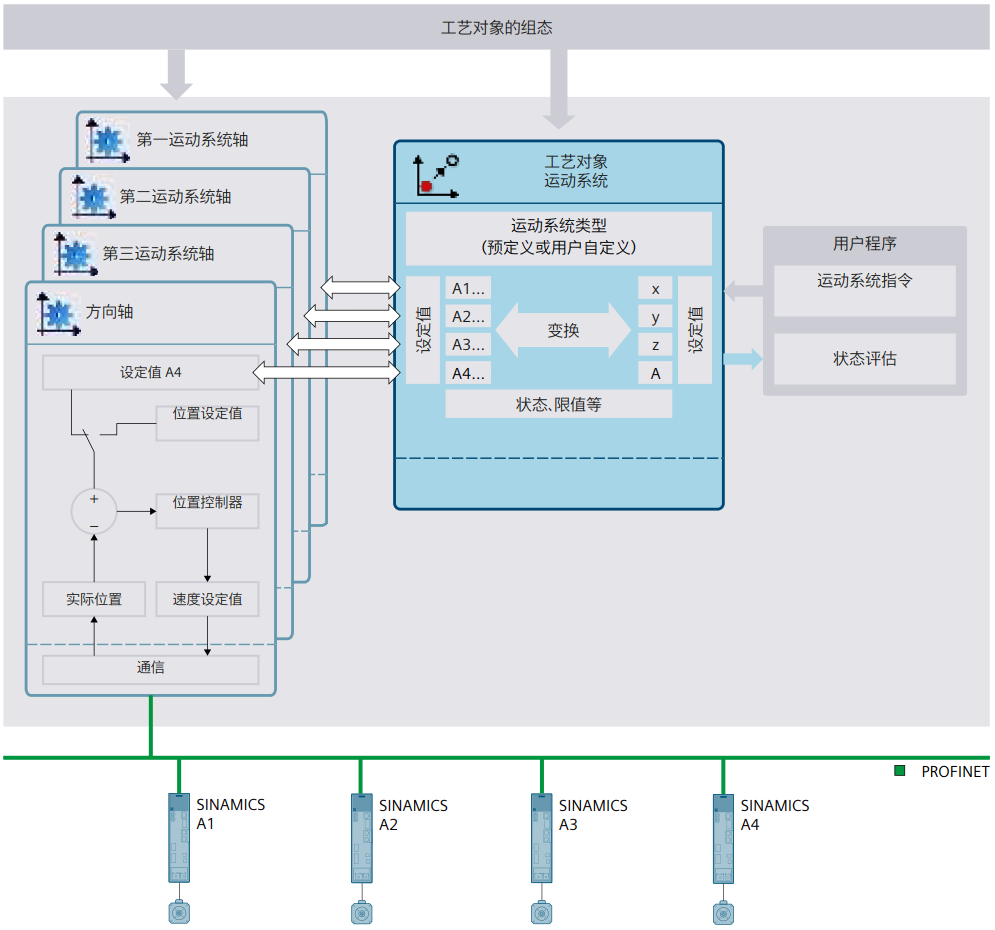
图2 运动机构工艺对象的基本工作原理
运动机构工艺对象的创建需要占用 PLC 的运动控制资源,除了互连轴的运动控制资源外,每个运动机构工艺对象还使用 30 个“扩展运动控制资源”,在 PLC 选型时应注意它具有的资源数目。
1.2 运动机构的运动类型
S7-1200 G2 支持运动机构的线性运动及圆周运动,在运动控制命令中可以通过设置参数实现多个运动的连续控制。
(1)线性运动
可采用线性运动的方式移动运动机构,运动控制命令为“MC_MoveLinearAbsolute”和
“MC_MoveLinearRelative”。通过“MC_MoveLinearAbsolute”命令将运动机构移动到绝对位置,目标位置在命令的输入参数“Position”中指定。通过“MC_MoveLinearRelative”命令控制运动机构基于当前位置进行相对移动,相对位置在命令的输入参数“Distance”中指定。运动机构的动态特性在输入参数“Velocity”、“Acceleration”、“Deceleration”和“Jerk”中指定。如图3所示。
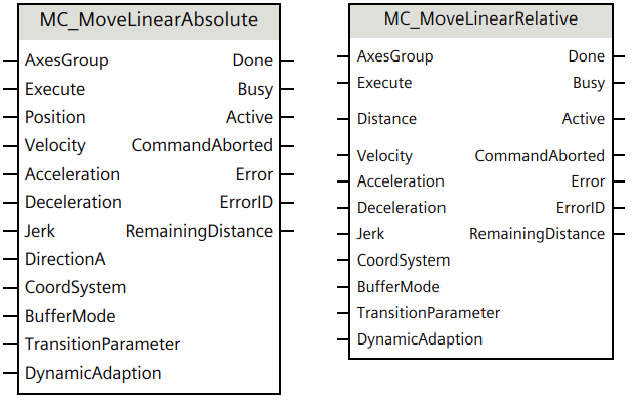
图3 线性运动指令
(2)圆周运动
可采用圆周运动的方式移动运动机构,运动控制命令为“MC_MoveCircularAbsolute”和“MC_MoveCircularRelative”。“MC_MoveCircularAbsolute”命令将运动机构移动到绝对位置,而“MC_MoveCircularRelative”命令控制运动机构基于当前位置进行相对移动。运动机构的动态特性在输入参数“Velocity”、“Acceleration”、“Deceleration”和“Jerk”中指定。如图4所示。
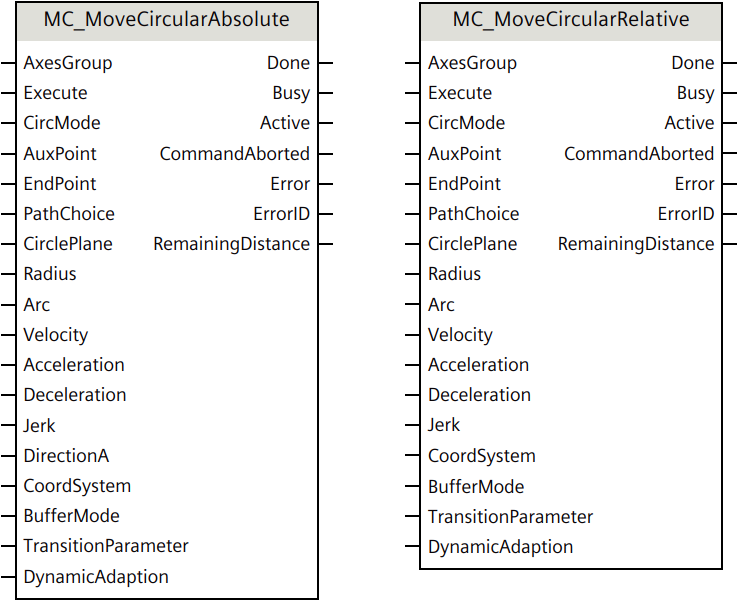
图4 圆周运动指令
重要参数说明如下:
• “CircMode”,指定圆周运动轨迹的方法
• “AuxPoint”,指定圆周轨迹中间点
• “EndPoint”,指定圆周轨迹的终点
• “PathChoice”,指定圆周轨迹正向行进或负向行进
• “CirclePlane”,指定圆周轨迹行进的主平面
• “Radius”,指定圆周运动的半径
• “Arc”,指定圆周角度
• “CoordSystem”,指定使用的坐标系
在圆周运动时,用三种方式定义圆周轨迹,通过命令中的输入参数“CircMode”指定:
1) 通过中间点和终点(“CircMode”=0)。输入参数“AuxPoint”指定一个圆周轨迹中间点,通过该点逐渐逼近参数“EndPoint”指定的终点。圆周轨迹可通过起点、中间点和终点进行计算,仅支持 360° 以内的圆周运动,如图5所示。
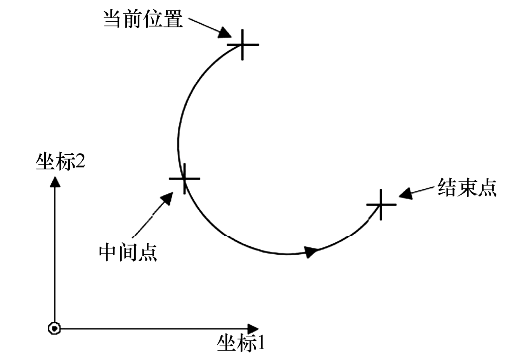
图5 “CircMode”=0 的圆周运动
2) 通过圆心和主平面中的角度(“CircMode”=1)。输入参数“AuxPoint”定义该圆的中心点,圆周轨迹的终点则通过“Arc”参数中指定的角度计算得出,参数“PathChoice”用来指定圆周轨迹正向行进或负向行进,参数“CirclePlane”可指定圆周轨迹行进的主平面。圆周轨迹的终点通过圆心和角度进行计算,如图6所示。
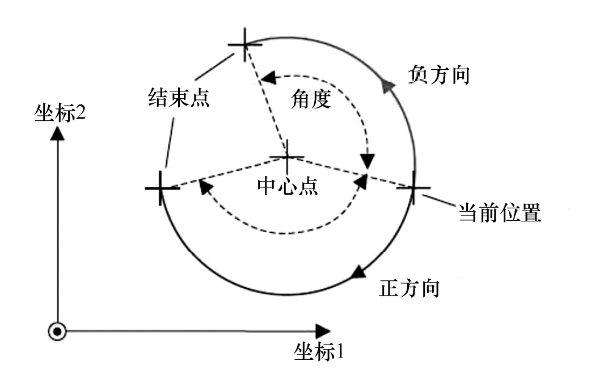
图6 “CircMode”=1 的圆周运动
3) 通过半径和主平面中的终点(“CircMode”=2)。输入参数“EndPoint”指定圆周轨迹的终点,“Radius”指定圆周轨迹的半径。在“CirclePlane”参数定义的平面中,最多可以有 4 个圆周轨迹,如图7所示。
可以通过参数“PathChoice”指定采用哪个圆:
•“PathChoice”=0采用较短的正向圆周轨迹
•“PathChoice”=1采用较短的负向圆周轨迹
•“PathChoice”=2采用较长的正向圆周轨迹
•“PathChoice”=3采用较长的负向圆周轨迹
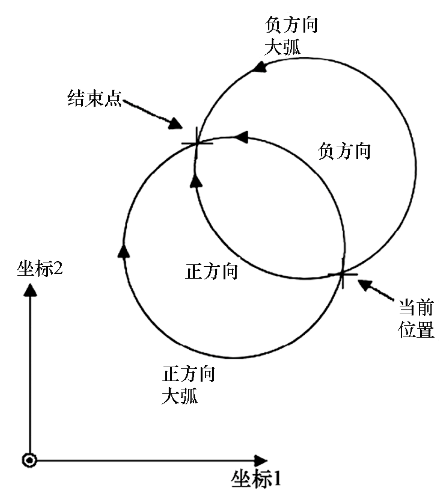
图7 “CircMode”=2 的圆周运动
(3)运动的状态
对于直线运动或圆弧运动的运动控制命令,可以使用“Busy”和“Active”输出参数标识运动的状态。
1) 执行命令时,“Busy”参数设置为TRUE,并将此命令添加到作业序列中。
2) 运动命令在作业序列中时,将“Active”参数设置为 FALSE。
3)命令在运动控制中激活后,将“Active”参数设置为 TRUE。
4) 如果运动命令完成,参数“Busy”和“Active”置位为 FALSE,参数“Done”置位为 TRUE。
5) 如果将其它运动命令添加到作业序列中,则会重新计算作业序列中的所有未激活命令。当前运动也包含在新的计算中,以便当前运动与下一个运动混合。
6) 输出参数“RemainingDistance”可以获取运动指令的剩余距离。
1.3 运动机构的多个运动衔接
对于运动机构可以进行多个运动的连接,即路径规划。运动机构可以在各个运动间停止,也可以实现连续的运动。路径是由点及过渡区域或标准的几何元素组成的,图8是由 P1~P5 共计 5 个点规划的路径。在由 P1-P2 和 P2-P3 两条直线的过渡区域可以由控制器进行计算,也可以在由 P2-P3 和 P4-P5 两条直线间增加 P3-P4 圆弧曲线过渡。
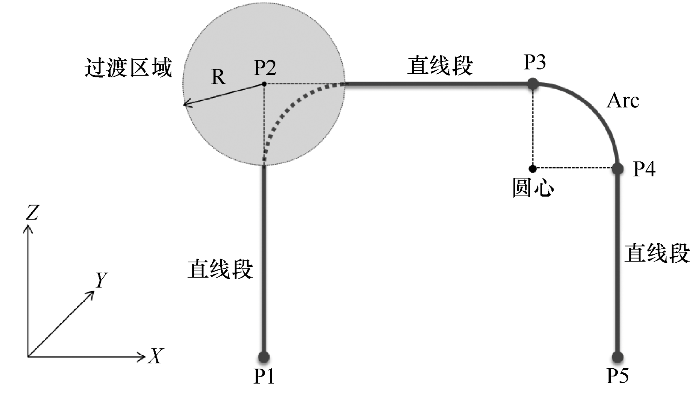
图8 路径规划示例
1) 对于线性运动的运动衔接
可以使用运动控制命令“MC_MoveLinearAbsolute”和“MC_MoveLinearRelative”的输入参数“BufferMode”及TransitionParameter[1]”设置两个运动的过渡模式,表1是“BufferMode”和“TransitionParameter[1]”两参数的设置,描述当前线性运动 (A1) 和后续线性运动 (A2) 来解释各种运动跳转。
表1 两个线性运动的过渡模式说明
| “TransitionParameter[1]” | “BufferMode” | 说明 |
| 不相关 | “BufferMode”=1 | 附加运动: 当前的线性运动已完成,运动机构将停止,然后执行下一个线性运动 |
| d>0.0 | “BufferMode”=2、5 | 运动过渡: 1)当到达目标位置的过渡距离时,激活的线性运动与下一个线性运动混合 2)当“BufferMode”=2 时,两种运动在低速状态下混合 当“BufferMode”=5 时,两种运动在高速状态下混合 |
| d=0.0 | “BufferMode”=2、5 | 运动过渡: 1)由于过渡距离为 0.0,因此行进过程与“BufferMode”=1 时相同 2)当前的线性运动已完成,运动机构将停止,然后执行下一个线性运动 |
| d<0.0 | “BufferMode”=2、5 | 运动过渡: 1)由于过渡距离为负,因此使用最大过渡距离,示例中最大过渡距离被“<TO>.Transition.FactorBlendingLength”默认值限制为较短距离的50%;当到达目标位置的过渡距离时,激活的线性运动与下一个线性运动混合 2)当“BufferMode”=2 时,两种运动作业在低速状态下混合 当“BufferMode”=5 时,两种运动在高速状态下混合 |
2) 对于圆周运动的运动衔接
可使用运动控制命令“MC_MoveCircularAbsolute”和“MC_MoveCircularRelative”,通过命令中的输入参数“BufferMode”及“TransitionParameter[1]”设置两个运动的过渡模式,表2是“BufferMode”和“TransitionParameter[1]” 两参数的设置,描述当前线性运动 (A1) 和后续圆周运动 (A2) 来解释各种运动跳转。
表2 线性运动和圆周运动的过渡模式说明
| “TransitionParameter[1]” | “BufferMode” | 说明 |
| 不相关 | “BufferMode”=1 | 附加运动: 当前的线性运动已完成,运动机构将停止,然后执行下一个圆周运动 |
| d>0.0 | “BufferMode”=2、5 | 运动过渡: 1)当到达目标位置的过渡距离时,激活的线性运动与圆周运动混合 2)当“BufferMode”=2 时,两种运动作业在低速状态下混合 当“BufferMode”=5 时,两种运动在高速状态下混合 |
| d=0.0 | “BufferMode”=2、5 | 运动过渡: 1)由于过渡距离为 0.0,因此行进过程与“BufferMode”=1 时相同 2)当前的线性运动已完成,运动机构将停止,然后执行下一个圆周运动 |
| d<0.0 | “BufferMode”=2、5 | 运动过渡: 1)由于过渡距离为负,因此使用最大过渡距离,示例中最大过渡距离被“<TO>.Transition.FactorBlendingLength”默认值限制为较短距离的50%;当到达目标位置的过渡距离时,激活的线性运动与下一个圆周运动混合 2)当“BufferMode”=2 时,两种运动作业在低速状态下混合 当“BufferMode”=5 时,两种运动在高速状态下混合 |
1.4 运动机构的调试
(1)运动机构的控制面板
为了方便运动机构的运行调试,TIA 博途软件中提供了运动机构的控制面板,可获取运动机构工艺对象的控制权限,控制该运动机构或各个独立关节轴的运动,如图9所示。
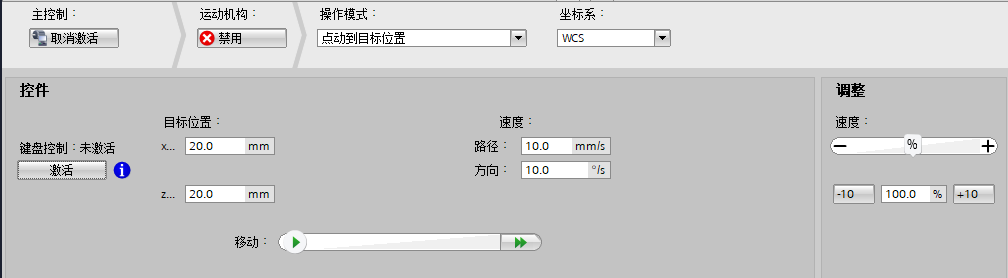
图9 运动机构的控制面板
通过运动机构的控制面板控制运动机构或各个独立关节轴,请按下列步骤操作:
1) 在“主控制”区域中,单击“激活”按钮可以获取该工艺对象的主控制权限。
2) 在“运动机构”区域中单击“启用”按钮,启用该工艺对象。
3) 在“操作模式”区域中的下拉列表中,选择运动机构控制面板所需的功能。
4) 在“坐标系”下拉列表中选择需要的坐标系。
5) 在“控件”区域,可以设置对应操作模式下的相关参数。
6) 在“调整”区域,可以设置速度的倍率。
7) 如果要禁用该工艺对象,可以单击“禁用”按钮。
8) 单击“取消激活”按钮,将主控制权限返回给用户程序,取消控制面板的操作。
(2) 运动机构的轨迹
在运动机构运行时,可以通过运动轨迹跟踪功能实时查看运动轨迹,以便更加直观地看到路径运行的状态。主要有以下功能:
1) 工具中心点 (TCP) 当前运动的三维可视化。
2) 记录运动机构的运动路径,并作为轨迹回放。
3) 可组态记录持续时间、采样率和触发记录等参数。
4) 路径运动的记录保存为测量值,或者以文件格式导出和导入。
双击路径对象下的“运动机构轨迹”,如图10所示。
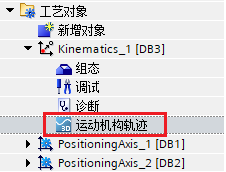
图10 运动机构轨迹
在打开的界面中,可单击“组态”标签进行信号跟踪的设置,如图11所示。
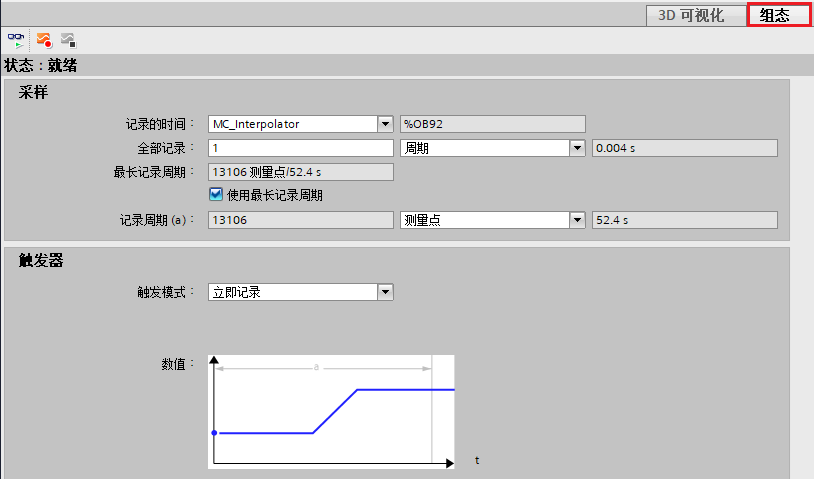
图11 运动机构轨迹“组态”界面
完成轨迹的组态后,操作运动机构运动,并在“3D 可视化”界面单击“记录”按钮,可以跟踪路径曲线轨迹,如图12所示。
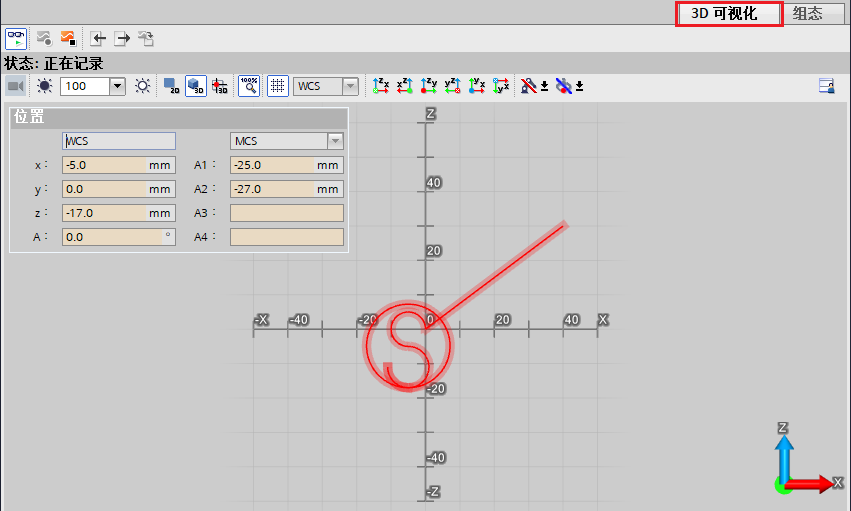
图12 运动机构轨迹“3D 可视化”界面
1.5 运动机构的编程
在用户程序中,可通过运动机构的直线运动、圆弧运动、中断、继续、停止运动等命令对运动机构进行路径运动控制。在前面章节中已对直线及圆弧运动控制命令做了详细介绍,以下对其它运动机构命令:中断、继续、停止和复位做简要介绍。
1) MC_GroupInterrupt
该控制命令可中断运动机构工艺对象上执行的运动。使用参数“Mode”,可指定中断动作的动态特性。当“Mode”=0 时,使用被中断运动命令的动态特性进行停止;当“Mode”=1 时,通过运动机构组态的最大动态参数进行停止。
2) MC_GroupContinue
该控制命令可继续执行之前由“MC_GroupInterrupt”中断的运动系统的运动。只有当工艺对象的状态为“Interrupted”时(<TO>.StatusWord.X17),该命令才有效。
3) MC_GroupStop
该控制命令可停止和中止运动机构工艺对象上当前的运动。如果运动已由“MC_GroupInterrupt”中断,则将中止运行。作业序列中所有未执行的命令也将被“MC_GroupStop”中止。
4) MC_Reset
该命令用于复位或重启工艺对象,确认运动机构工艺对象的错误,使用“MC_Reset”时,需要在“Axis”参数上填写运动机构工艺对象的名称。
1.6 运动机构的应用示例
示例任务:编写路径插补程序,实现如图13的轨迹,并使用运动机构的轨迹功能记录运行轨迹。
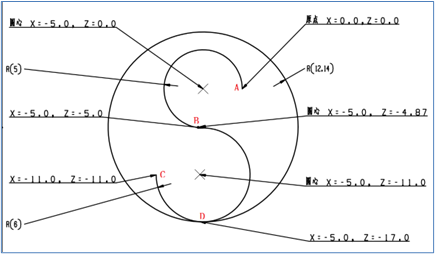
图13 运动路径轨迹
运行轨迹分为以下几部分:
• 从任意位置直线运行到初始位置 (x=0.0,z=0.0)
• “S” 曲线的上半部分 S1 ( 从 A 点到 B 点)
• “S” 曲线的下半部分 S2 ( 从 B 点到 C 点)
• “S” 曲线的下半部分 S3 ( 从 C 点到 D 点)
• 外部圆 S4
创建运动机构功能的配置过程,请参见:运动机构示例

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







{{item.nickName}}