




















 官方商城-正品备件
官方商城-正品备件
 DIMOIS
DIMOIS
- {{item.name}}
更多

S120 伺服驱动系统中如何通过编码器数值核算实际位置

发布时间:2026年04月02日
- 0
- 313
本文介绍了在S120 伺服驱动系统中,如何通过编码器数值核算实际位置
S120 伺服驱动系统中,如何通过编码器数值核算实际位置
1、绝对值编码器有绝对码值r483和增量码值r482,增量编码器只有增量码值r482
2、r482的结构:圈数+p0408+p0418 32位,编码器一圈,r482变化 p0408*2P418
3、r483的结构:p421+p408+p0419 32位,编码器一圈,r483变化 p0408*2P419
例如:p408=512, p418=11,p419=9,P421=1 圈数(仅用于r483)
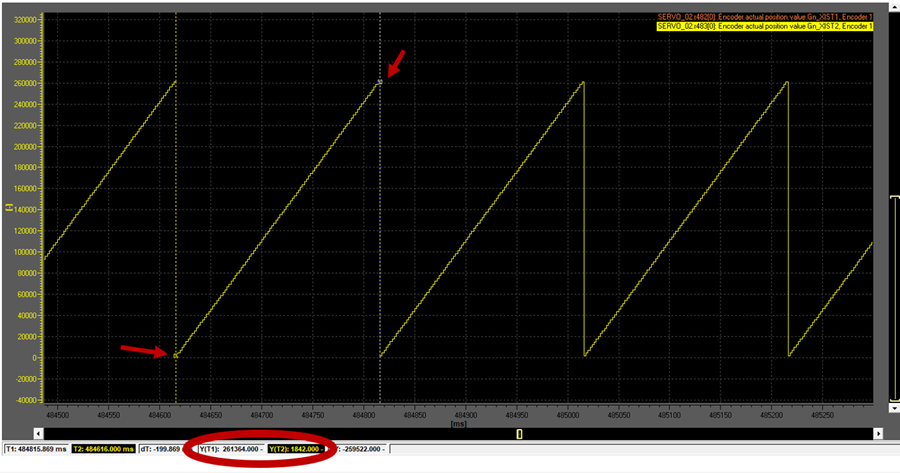
编码器一圈变化r483=p0408*2P419=262144
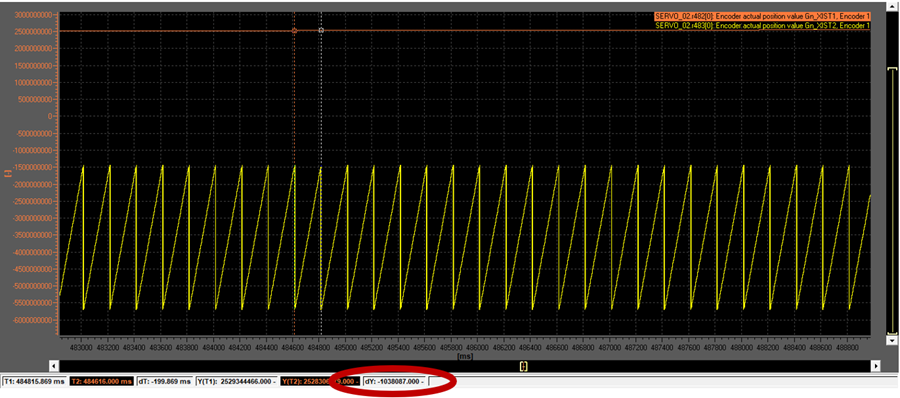
编码器一圈变化r482=p0408*2P418= 1048576
4、R482的范围是0-232
5、如何通过编码器的码值与位置对应
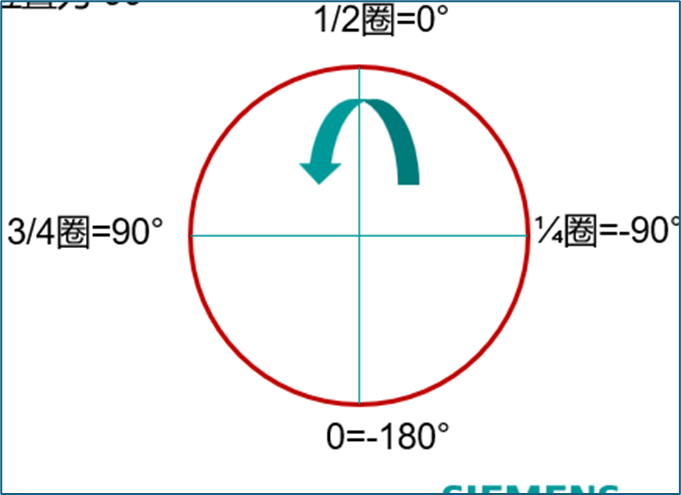
设置参考零位:旋转轴,一圈为360°,找到r483和r2521的对应关系
例如,当r483=131072(1/2圈)时,位置校准为0°。
重新上电,系统读r483的值,例如r483=65536(1/4圈),系统认为实际位置为-90°。后续,s120或者工艺对象根据r482变化值,计算走了多少距离。
6、总结:
· 绝对值编码器有r483和r482,增量编码器只有r482
· 编码器转一圈,r483的变化为=p0408*2P419,r482变化= p0408*2P418
· 单圈绝对编码器r483只能记录一圈的值,范围0- p0408*2P419
· 多圈绝对对编码器r483可以记录4096圈,范围0-P421* p0408*2P419
· 单圈(多圈)绝对值编码器重新上电后,r483的值为能识别范围内的值。单圈0-360°,多圈4096*360°。
· r482的范围是0-232断电重新上电,r482始终为“0”,由于细分不完全是0。
· EPOS和工艺对象位置轴,设置零点确定r483与机械零点的对应关系
· 每次重新上电读取r483值,通过偏移得出当前位置,运行过程中根据当前位置和r482增量相加为实时位置

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错






{{item.nickName}}