找答案的高端用户(找答案钻石及双钻级别的用户)将尽可能从此问题下的所有回
答中,为您推荐最佳答案。届时您可以根据推荐数采纳答案。
如果自提问时间起7天内您仍无法选出最佳答案,您可以选择“无满意答案”关闭此问题。
 问题
问题
 取消精华
取消精华
 首页精华问答
取消推荐
首页精华问答
取消推荐
 高端用户推荐
高端用户推荐
 申请置评
已申请置评
申请置评
已申请置评
 修改
修改
 修改标签
添加标签
修改标签
添加标签
 官方认证
取消官方认证
修改标签
添加标签
官方认证
取消官方认证
修改标签
添加标签
 删除
删除
{{itemCategory}}
扫码小程序:
一键登录查看全部问答



 收藏({{answerDetail.Q_FavoriteCounts}})
收藏({{answerDetail.Q_FavoriteCounts}})


 专家建议
修改
专家建议
修改
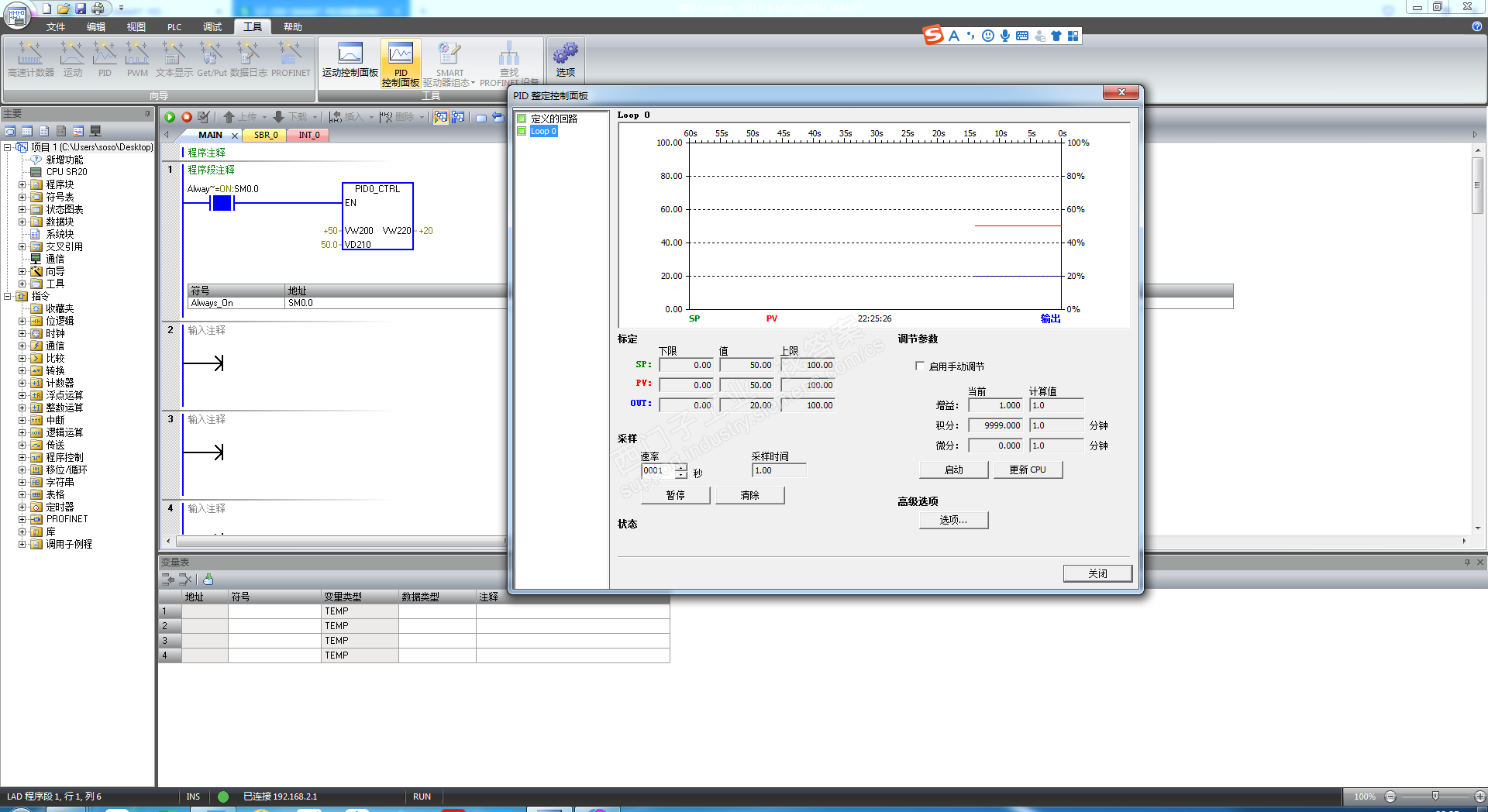
按照你的理论,偏差为零(也就是你所的差值为零),输出就应该为零,那么偏差又变大了。那系统永远稳定不了,我们的控制就没有意义了。建议你好好学习控制理论。
由于有积分项的存在,尽管偏差为零,但累计求和的积分项并不为零,维持了控制作用,输出也就不为零,而是接近控制目标即设定值。(即使是被控过程或对象,本身也可能有积分项存在)。我们引入PID控制器的目的,是改善被控过程或被控对象的静态性能和动态性能指标。
加热是一个热交换过程,环境温度低于设定温度,会带走热量,可以起到冷却的作用。因此加热量与环境冷却量一致温度才会稳定下来。
至于你选择Td=9999分钟,Ti=0,而采样时间只有1s。积分项系数ki=kp*T/Td=1*1/(9999*60)基本为零。Ti=0则微分项也为零。这样控制作用成了比例控制。你整定中pv=sp,err=0,此时out=20.0%,应该是你设置了输出通道20%的偏差(4-20mA)造成的。



 讲解视频
讲解视频
一分钟,西门子工程师带你解析本题
 等您来回答
换一换
等您来回答
换一换
 {{item.CoinValue}}西币
{{item.CoinValue}}西币
 {{item.VisitNum}}人想问
{{item.VisitNum}}人想问
 本版相关问题
换一换
本版相关问题
换一换



找答案微信小程序

提问

搜索






















 西门子商城
西门子商城 西门子中国
西门子中国
 3
3








 本版热门问题
本版热门问题
 {{item.ReadCount}}人关注
{{item.ReadCount}}人关注
 向您推荐
向您推荐

 {{item.VisitNum}}人关注
{{item.VisitNum}}人关注




