找答案的高端用户(找答案钻石及双钻级别的用户)将尽可能从此问题下的所有回
答中,为您推荐最佳答案。届时您可以根据推荐数采纳答案。
如果自提问时间起7天内您仍无法选出最佳答案,您可以选择“无满意答案”关闭此问题。
 问题
问题
 取消精华
取消精华
 首页精华问答
取消推荐
首页精华问答
取消推荐
 高端用户推荐
高端用户推荐
 申请置评
已申请置评
申请置评
已申请置评
 修改
修改
 修改标签
添加标签
修改标签
添加标签
 官方认证
取消官方认证
修改标签
添加标签
官方认证
取消官方认证
修改标签
添加标签
 删除
删除
{{itemCategory}}
扫码小程序:
一键登录查看全部问答

 收藏({{answerDetail.Q_FavoriteCounts}})
收藏({{answerDetail.Q_FavoriteCounts}})


 专家建议
修改
专家建议
修改
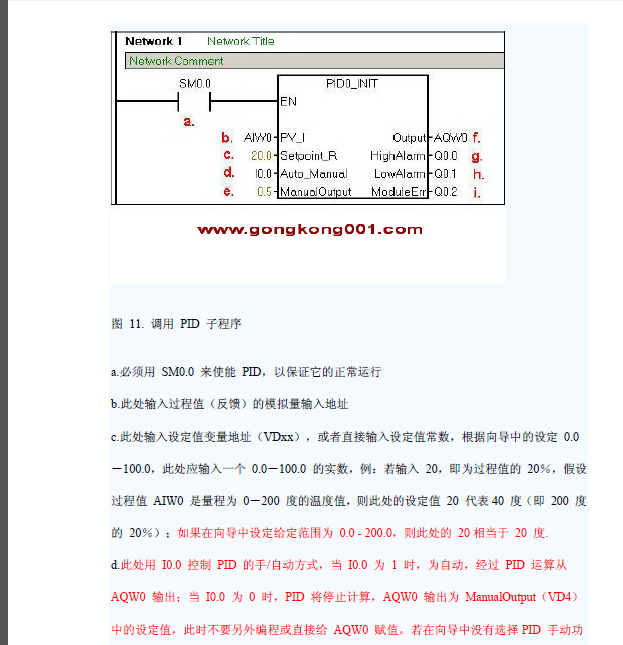
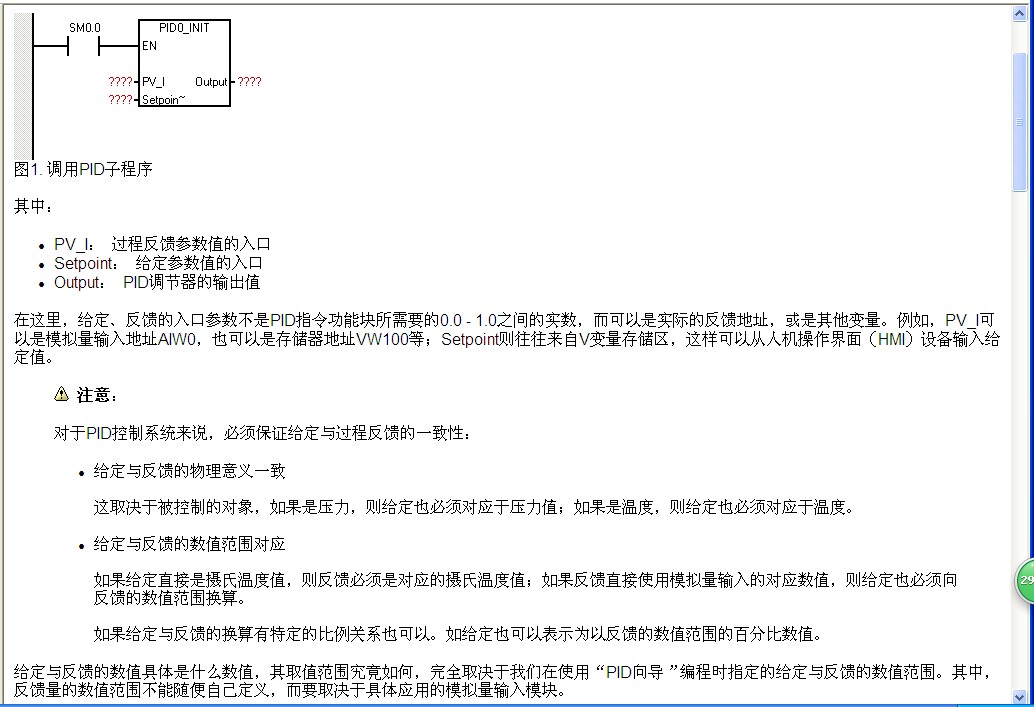
下面关于PID向导生成的子程序的使用方法的截图摘自Micro ''''n Power 。
补充问题的回答,其实你的那个图片上已经说的很明白了,这个设定值是与你用向导设置时的“回路给定值标定”中的上下限成线性比例关系的。输入信号4-20MA对应0-100Kg/h,设定端写入触摸屏输入0-100Kg/h,请问这样填入对不对?这样做是对的,那你用向导做“回路给定值标定”时,下限要设为0.0,上限要设为100.0,如果这里的下限设为6400.0,上限设为32000.0,那么设定值就要是6400-32000的值了.
多说两句,语文水平有限,可能说的不是很准确。其实PID的给定、反馈的入口参数需要的是0.0 - 1.0之间的实数,为什么用向导做可以是实际的反馈地址,或是其他变量?因为用向导时有回路输入和输出的标定设置,是向导自动的做了参数标准化的工作。你可以用这几张截图对照向导一步步的来理解。

图片说明:


 讲解视频
讲解视频
一分钟,西门子工程师带你解析本题
 等您来回答
换一换
等您来回答
换一换
 {{item.CoinValue}}西币
{{item.CoinValue}}西币
 {{item.VisitNum}}人想问
{{item.VisitNum}}人想问
 本版相关问题
换一换
本版相关问题
换一换



找答案微信小程序

提问

搜索






















 西门子商城
西门子商城 西门子中国
西门子中国
 1
1








 本版热门问题
本版热门问题
 {{item.ReadCount}}人关注
{{item.ReadCount}}人关注
 向您推荐
向您推荐

 {{item.VisitNum}}人关注
{{item.VisitNum}}人关注




