
















 西门子官方商城
西门子官方商城

- {{item.name}}
更多
操作指南
 5.0 分
5.0 分
如何在PDM 中使用FF设备的功能块
文档编号:A0652|
文档类型:操作指南|
发布时间:2024年01月30日
- 0
- 229
- 1161
本文以西门子FF仪表SIPART PS2 FF阀门定位器为例,介绍PDM V8.0中关于FF设备功能块的使用,包括参数设置、诊断、功能块的使用,并结合PCS 7 V8.0功能块实现CIF功能。FF设备的配置过程和SIPART PS2 FF手册参考以下链接: PCS 7 V8.0下FF设备配置入门 76254711 SIPART PS2 FF - Electropneumatic Positioner with FOUNDATION Fieldbus 17914342 ......
本文以西门子FF仪表SIPART PS2 FF阀门定位器为例,介绍PDM V8.0中关于FF设备功能块的使用,包括参数设置、诊断、功能块的使用,并结合PCS 7 V8.0功能块实现CIF功能。FF设备的配置过程和SIPART PS2 FF手册参考以下链接:
| PCS 7 V8.0下FF设备配置入门 76254711 |
| SIPART PS2 FF - Electropneumatic Positioner with FOUNDATION Fieldbus 17914342 |
1.FF功能块介绍
功能模块(FUNCTION BLOCK)技术是FF现场总线实现分布式控制的一项重要手段。在传统的DCS中,控制功能主要在工作站实现,不能真正实现分散控制。在FF现场总线中,FF用户层协议将实现控制系统所需的各种功能封装为通用的模块结构,并定义它们的输入、输出、算法、事件及控制图等内容。FF的功能块可以供用户自由选择,可统一组态,构成所需的的控制系统,并且实现了彻底的分散控制。另外,基金会现场总线使用标准功能块完成控制策略。功能块是标准的自动化函数,现场总线基金会把功能块FB主要分成了三类:资源块(Resource Block)、转换块(Transducer Block)、功能块FB(Function Block)。
资源块RB描述了诸如设备名、生产厂家和序号等的现场总线设备特征,还提供设备健康状态或状况的整个信息。一台设备只有一个资源块,在运行期间,可利用它获得整个设备的组态信息和状态信息,以及运行一些特定设备的诊断程序。
转换块TB把读传感器和命令输出到硬件的本地输入/输出的功能分开,并控制执行结构、显示器等其他输出硬件。它们还包含标定日期和传感器类型等信息。每个输入或输出功能块通常就是一个转换块。
功能块FB提供了控制系统行为。功能块的输入和输出可通过现场总线相连接,包括模拟量和离散量输入和输出块,以及诸如表征器、分路器或 PID 之类的控制算法,通过现场总线连接以执行过程控制。在一个用户应用中可以有多个功能块。
FF协议支持CIF(Control in Field,现场控制)功能,可以实现FF设备现场控制CIF,即通过FF设备的功能块互联,实现脱离PLC的回路控制。典型的控制回路如图1所示: PID功能块的调节输出作为AO功能块的输入,由AO功能块完成输出到设备;由另一个设备的AI功能块为PID提供PV值。根据FF功能块规则需要将AO.BKCAL_OUT 和PID.BKCAL_IN互联。
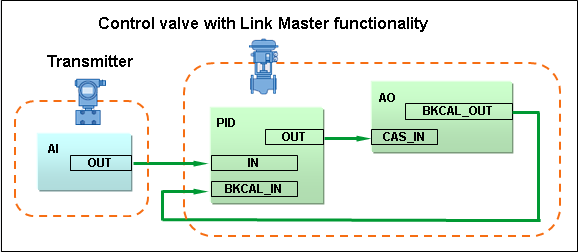
图1 典型的CIF控制回路
2. SIPART PS2 FF功能块参数设置和功能块介绍
SIPART PS2 FF的组态过程参考链接文档。配置SIPART PS2 FF地址为22,并完成FF总线优化和下载。在HW组态界面双击FF-devices或者通过Process Devices View中右击FF-devices通过命令“Open Object” 打开PDM界面。菜单如图2所示;

图2 PDM界面和菜单功能
通过PDM的菜单能够完成以下功能:
• FF设备配置文件(XML格式)的导出和导入;
• 功能块的参数设置、上载和下载;
• 在线模式的切换;
• 显示功能块的过程值;
• 查看功能块的诊断信息;
2.1 功能块Modes
在PDM中功能块参数Common选项下Permitted和Normal可以设置功能块允许和期望的mode。而功能块实际运行的mode只能在online时查看。通过菜单DeviceModes打开设备在线模式,如图3所示;
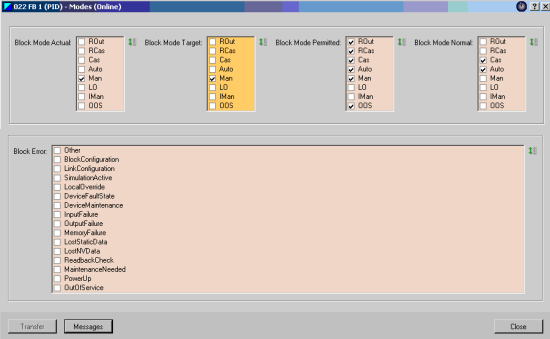
图3功能块的mode
其中:
• Block Mode Actual:块运行当前的模式
• Block Mode Target:操作员设置的模式
• Block Mode Permitted:块允许使用的模式
• Block Mode Normal:块期望的操作模式
功能块支持的mode不完全相同,需要查看对应的设备手册进行设定对应的Permitted mode。功能块在线后设定功能块的Target mode并通过Transfer按钮送到功能块Actual mode。块实际模式主要受以下因素影响,当Target mode和Actual mode不一致时,应该首先检查这几个条件是否相关。
• 块许可(Block Mode Permitted)模式,即设定的模式必须是允许的;
• 输入参数的状态,在CIF控制中会检测输入参数的质量代码。如果状态为Bad,则模式不会切换到设定模式;
• 资源状态,要求RB和TB工作在AUTO模式;
• 块特定的输入和退化选项(Shed_opt)
2.2 诊断和参数状态
通过菜单DevicesObject Properties打开阀门定位器的属性,可以查看FF设备的诊断信息,诊断页面如图4所示;
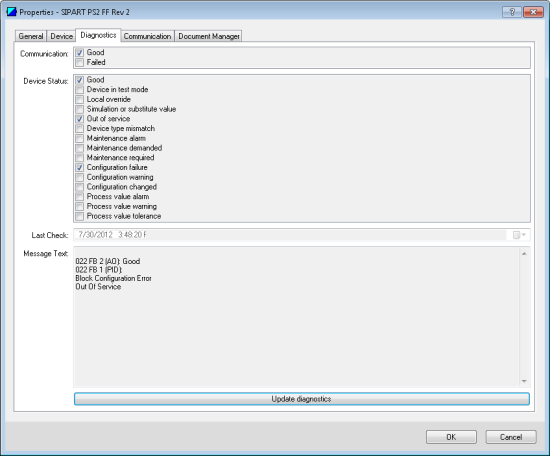
图4 FF设备的诊断信息
在FF设备的输入和输出参数中都包含一个特定字节,用来显示参数的状态。在功能块互联时,功能块之间需要判断参数状态,来决定上游块和下游块的模式。参数状态的内容见表1;
表1 参数状态
| 品质: (2bit) | (品质)子状态: (4bit) | 限制: (2bit) |
| 反映值的主要品质状态 | 反映值的主要品质下进一步的品质状态; 不同品质下具有不同的品质子状态集 | 表明相关值是否受限制 |
| • 坏的 • 不确定的 • 好的-非串级 • 好的-串级 | • 无限制 • 低端受限 • 高端受限 • 恒定/常数 |
2.3 初始化和功能块RB、TB
SIPART PS2 FF阀门定位器在调试前必须进行初始化。通过阀门定位器的按钮,按照实际的设备设置对应的参数,步骤如下图5所示;
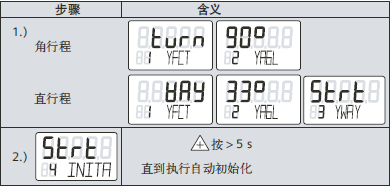
图5 SIPART PS2 FF初始化步骤
初始化完成后在定位器界面显示操作模式和对应的输出值,可以通过按钮切换到自动模式。之后在PDM中上传定位器在线参数到软件中,并查看RB和TB功能块的工作模式。这两个功能块必须工作在AUTO模式下。在对阀门定位器完成参数初始化自后,RB和TB即可以进入AUTO模式;如果RB和TB不在AUTO模式,可以使用诊断功能检查参数设置并通过模式切换。
选中功能块后通过菜单DevicesBlock parameters(online)查看功能的在线模式和数值,RB和TB的部分参数如图6所示;
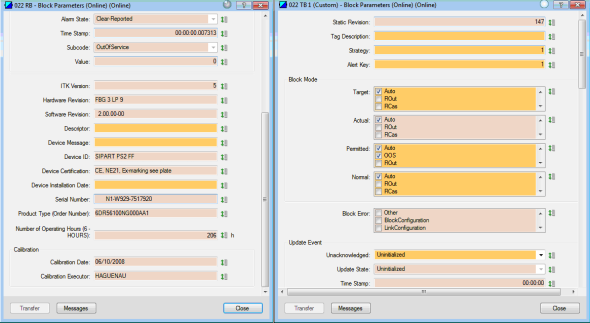
图6 RB和TB的部分参数
注意:由于EDD文件并没有包含定位器标准值,定位器设备必须在完成进行初始化之后才能正常投入运行。同时在修改TB和RB的参数之前必须先上载设备参数到PG。
2.4 AO功能块
AO功能块是模拟输出变换块接口;将块的计算结果输出至现场设备,AO功能块的原理图如图7示;
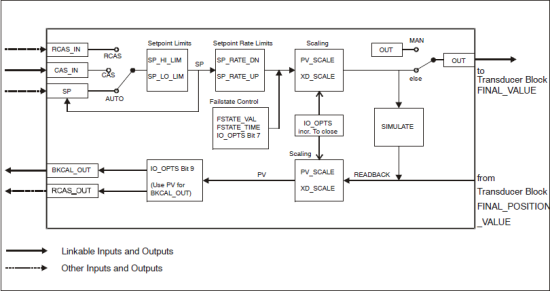
图7 AO功能块原理图
AO功能块支持以下功能:
• 支持O/S、LO、IMan、Man、Auto、Cas与RCas模式;功能块的由mode来选择SP的数据源;
• 具有PV_SCALE 至XD_SCALE的量纲变换功能;
• OUT支持XD_SCALE跨度反转(INC to Close);
• SP支持完整的串级功能,可支持输出回读。
必须正确设置以下参数:Process Value Scale、Transducer Scale、Setpoint Limit、Channel后AO功能块才能正常工作。
2.5 PID功能块介绍
PID功能块主要完完成比例/积分/微分控制功能,原理图如图8 所示;
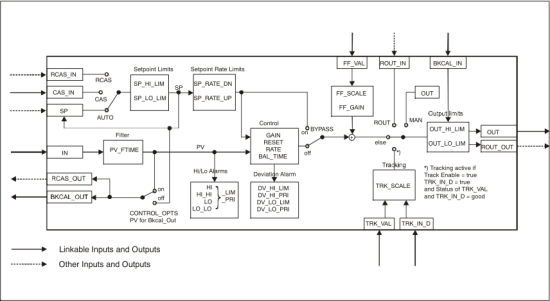
图8 PID功能块原理图
PID功能块的IO管脚见表2,PID功能块有以下特性:
• 支持模式控制、信号变换与限制、前馈控制、替代跟踪、报警限检测;
• 支持O/S、LO、IMan、Man、Auto、Cas、RCas及ROut模式;
• 支持正、反作用与旁路功能、支持PID块的串级、支持输出跟踪算法。
表2 PID功能块IO说明
| IO | 描述 |
| BKCAL_IN | 从其他功能块连接BKCAL_OUT的数值和状态;用于反向输出跟踪和无扰动切换 |
| CAS_IN | 从上游功能块块传递过来的设定值 |
| IN | 测量值 |
| TRK_IN_D | 启动外部跟踪功能 |
| TRK_VAL | 在Local Override模式下用于输出的设定值 |
| BKCAL_OUT | 连接到其他功能块的BKCAL_IN管脚提供数值和状态,用于无扰动切换 |
| OUT | 功能块的输出值 |
PID功能块必须正确设置以下参数:Bypass、Setpoint Limit、Output Limit、Process Value Scale、Output Scale、Tracking Scale、Feed Forward Scale。即使没有使用Tracking和Feed forward功能,也必须设置对应的Scale高低限。否则功能块提示“Configuration failure”并保持在OOS模式。
在功能块中还有部分参数需要结合实际的仪表和现场控制需求进行设置,例如:I/O options、control options、status options。详细信息参考对应的技术手册。
3.CIF功能配置和调试
在定位器中集成了AO和PID功能块,可以构成简单的控制回路;也可以通过CFC的PID功能块实现对AO的输出控制,下面通过示例介绍这两种方法。由于在硬件组态中仅组态了SIPART PS2 FF,无法获取现场数据。示例中通过CFC的功能块FbAnOu提供现场的返回值,由PIDConL充当FB的上游块。在实际环境下可以获取实际测量值时需要在CIF中配置FF设备的测量值和PID.IN之间的连接,也能够通过FF设备的测量值为PID.CAS_IN提供数据。
3.1 编辑CIF连接
在FF Link上右击,通过菜单“Start Connection Editor”进入Connection Editor界面。如图9所示,

图9 CIF连接组态
在Connection Editor界面分别列出了可以互联的IO管脚,选择需要互联的管脚通过“Add interconnection“命令完成, CIF组态如图10所示。也可以通过“Delete interconnection”命令删除已经配置的连接。完成CIF的组态工作之后,必须对FF总线进行优化并重新装载Schedule。

图10 CIF连接组态界面
在硬件组态中设置PID的IO地址IN、CAS_IN、TRK_IN_D和TRK_VAL地址,并分配符号名。IO地址包含数据和参数状态两部分内容,参数状态占1byte,需要单独分配符号名,如图11所示;
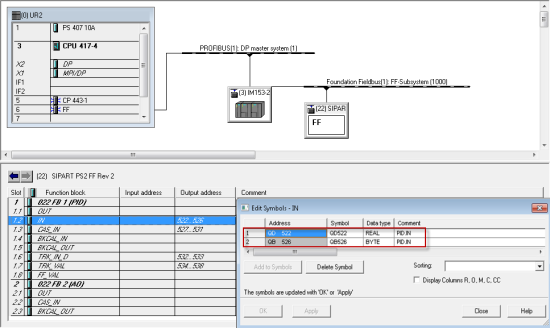
图11 FF设备IO地址和符号名分配
3.2 通过FF设备的PID功能块控制
借助FF 设备的PID和AO功能块实现CIF功能。通过CFC的功能块FbAnOu为FF设备功能块PID提供IN和CAS_IN数据,由PID调节后由AO输出,框图如图12所示;

图12 FF设备PID连接框图
CIF的连接如下图9所示,在CFC程序中调用功能块FbAnOu,连接符号变量,如图13所示。必须连接状态变量至功能块的SP_ST管脚。

图13 CFC程序截图
在线模式下将AO功能块切换到CAS mode之后,再切换PID功能块至CAS mode。功能块PID和AO实际模式都为CAS后,定位器会跟随CAS_IN和IN变化。
通过菜单ViewProcess Variables查看PID功能块如图14所示;

图14 CAS mode下PID功能块的过程值
3.3 通过CFC的PIDConL功能块控制
在实际应用时,需要由操作人员设定阀门定位器的开度,并实现PID调节;此时必须在PLC程序中调用CFC功能块。在FF功能块中无法将CFC的数值传递给AO功能块。但可以借助PID功能块的Tracking功能实现此功能。如图7所示,在TRK_ID为1时开启PID的tracking功能,此时PID不再处理CAS_In数值, 而是将TRK_VAL通过OUT输出到AO功能块。
需要使能PID功能块参数Control options中的“Track Enable”。
CIF的互联如图9所示,功能块框图如图15所示;

图15 CFC功能块PID连接框图
在CFC中调用PIDConL功能块,PIDConL的输出通过FbAnOu连接至符号变量;调用功能块FbDiOu用于控制TRK_IN_D;如图16所示;
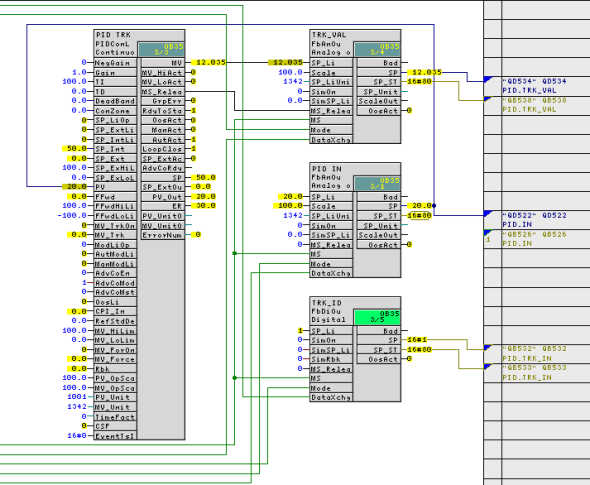
图16 CFC程序截图
在项目中进行OS编译后会在操作员界面生成PID的控制图标,可以设定定位器开度。在PID功能块处于CAS mode时,当TRK_IN_D=1时,功能块进入Tracking模式,同时PID mode切换为LO模式,如图17所示;

图17 Tracking功能下PID功能块处于LO mode
PID功能块在LO mode时的Process Variables在线值如图18所示;
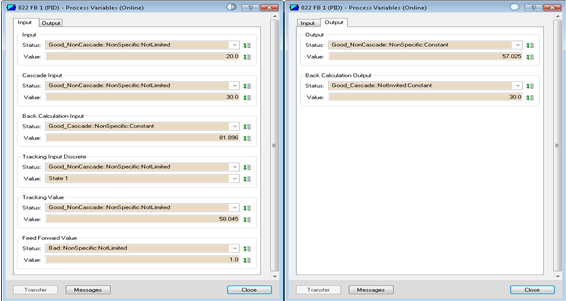
图18 LO mode下的PID功能块的过程值
关键词
control in field,PDM,foundation field

剩余80%未阅读,请登录后下载/查看文档

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错




 关联文档
关联文档
- PCS 7 V8.0下FF设备配置入门
- 机械设备的功能安全/安全性/TUEV, TÜV(技术检验协会)
- 如何将Modbus 协议的多功能物位计接入到PDM中
- 如何在AS系统中使用SIMATIC方式进行时间同步
- 如何在STEP 7 Professional V11 或更高的版本中使用FM352凸轮控制器(6ES7352-1AH02-0AE0) ?
- 如何在STEP 7 V5.x中使用循环中断实现信号发生器(矩形, 锯齿形, 三角形, 正弦信号)?
- 如何在AS-i现场总线系统中使用CM AS-i主站模块及F-CM AS-安全模块操作AS-从站?
- 用 PCS 7 V6.0中的SIMATIC PDM和Hardware Configuration配置现场设备
- 用于评估SITOP SEL1200/SEL1400诊断接口“COM”和可视化设备数据的功能块和面板
- 用于评估诊断接口“COM”与设备数据可视化的功能块和面板
















{{item.nickName}}