找答案的高端用户(找答案钻石及双钻级别的用户)将尽可能从此问题下的所有回
答中,为您推荐最佳答案。届时您可以根据推荐数采纳答案。
如果自提问时间起7天内您仍无法选出最佳答案,您可以选择“无满意答案”关闭此问题。
 问题
问题
 取消精华
取消精华
 首页精华问答
取消推荐
首页精华问答
取消推荐
 高端用户推荐
高端用户推荐
 申请置评
已申请置评
申请置评
已申请置评
 修改
修改
 修改标签
添加标签
修改标签
添加标签
 官方认证
取消官方认证
修改标签
添加标签
官方认证
取消官方认证
修改标签
添加标签
 删除
删除
{{itemCategory}}
扫码小程序:
一键登录查看全部问答


 收藏({{answerDetail.Q_FavoriteCounts}})
收藏({{answerDetail.Q_FavoriteCounts}})


 专家建议
修改
专家建议
修改
“收卷采用速度饱和转矩限幅 + 放卷直接张力控制”方案在原理上可行。
以下仅供参考
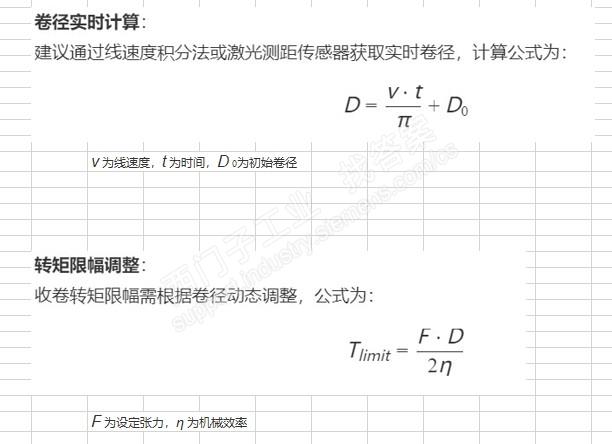
1、卷径计算与转矩限幅设计
详见图片
2、收放卷协同控制策略
收卷侧(速度饱和转矩模式):
主控轴设为速度模式,通过编码器反馈实现线速度闭环。
从控轴(收卷)在转矩模式下,根据卷径变化动态调整转矩限幅,确保张力恒定。
放卷侧(直接张力控制):
采用转矩模式,通过张力传感器实时反馈修正转矩指令。
若未配置传感器,可通过电机电流估算张力(需补偿摩擦和惯性力)。
3、系统动态补偿
惯性补偿:
加速/减速阶段需叠加惯性补偿转矩。
关键问题与优化建议
1.卷径计算精度提升
优先采用外部传感器(如超声波或激光测距)直接测量卷径,避免积分误差累积。
若使用积分法,需定期校准初始卷径D0
2.放卷张力控制稳定性
强制闭环反馈:
建议在放卷侧加装张力传感器(如HBM KMR40),直接闭环控制张力误差。
无传感器方案风险:
依赖电流估算时,需高精度电机模型,且动态响应可能滞后,导致张力波动±5%以上。
3. S120参数配置要点
控制模式选择:
收卷电机:速度模式(P1300=21) + 转矩限幅(P1522)。
放卷电机:转矩模式(P1300=22) + 张力闭环(通过工艺控制器或外部PLC)。
动态响应优化:
调整速度环参数(P1460/P1462)和电流环滤波器(P1350),确保转矩响应时间<10ms。
图片说明:


 讲解视频
讲解视频
一分钟,西门子工程师带你解析本题
 等您来回答
换一换
等您来回答
换一换
 {{item.CoinValue}}西币
{{item.CoinValue}}西币
 {{item.VisitNum}}人想问
{{item.VisitNum}}人想问
 本版相关问题
换一换
本版相关问题
换一换
 专家置评
专家置评



找答案微信小程序

提问

搜索


















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国
 1
1




 问题补充
问题补充



 本版热门问题
本版热门问题
 {{item.ReadCount}}人关注
{{item.ReadCount}}人关注
 向您推荐
向您推荐

 {{item.VisitNum}}人关注
{{item.VisitNum}}人关注





是通过调节收卷轴的角速度(ω = v/r)保持线速度恒定。
PID调节参数配置:
输入:设定线速度(v_set)与编码器反馈线速度(v_fb)的偏差值。
输出:收卷轴角速度修正量(Δω),需限制调节幅度以防止震荡。
参数整定,初始值可设为Kp=0.5,Ti=0.1s,Td=0.05s