


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

PID_3Step V2 自整定

发布时间:2025年12月22日
- 0
- 218
本章节讲解 S7-1200 G2 PID_3Step V2 自整定
1. PID_3Step V2 电机转换时间测量
为了能获得良好的控制结果,PID_3Step 中需要设置的电机转换时间尽可能的准确。
系统提供了以下 2 种途径组态电机转换时间:
- “工艺对象”-“组态”-“执行器设置”中,根据人工测算,直接填写电机转换时间;
- “工艺对象”-“调试”中,使用自动测量。
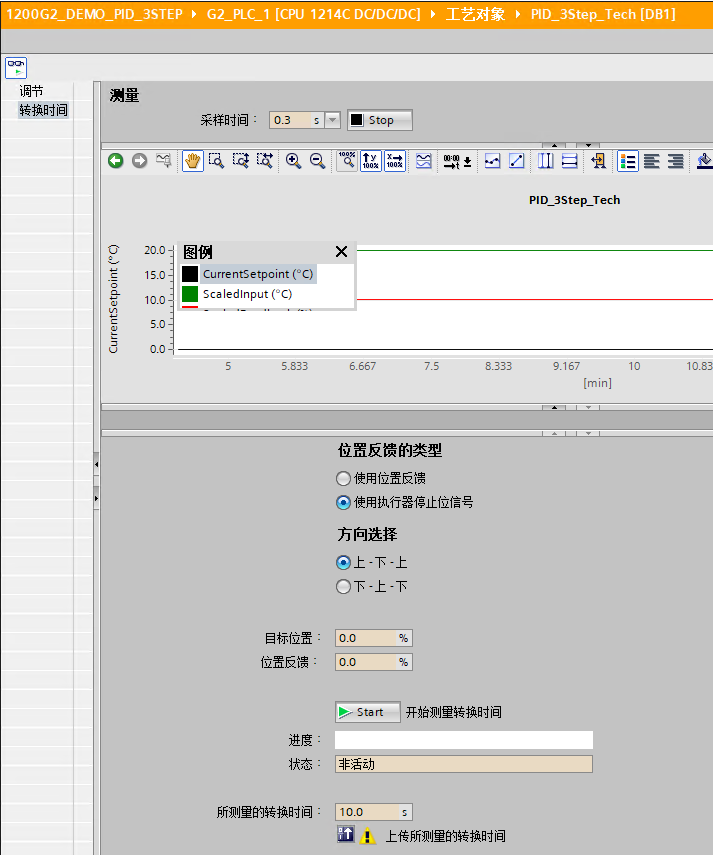
图1.1 调试转换时间界面
电机转换时间自动测量的操作步骤:
基本设置中选择 Feedback 或 Feedback_PER 并且已连接信号时,选择“使用位置反馈”,并设定“目标位置”;
或者基本设置中选中“停止位信号”(Endstop signals) 复选框并且已连接 Actuator_H 和 Actuator_L时,选择“使用执行器停止位信号”,选择一个运行方向;
点击“Start”按钮,待“状态”更新为“转换时间测量已成功完成”。
点击 上传参数按钮,并下载项目到PLC。
上传参数按钮,并下载项目到PLC。
2. PID_3Step V2 预调节
预调节可确定对输出值脉冲的过程响应,并搜索拐点。 经过调整的 PID 参数是根据受控系统的最大斜率和死区时间计算得出的。
过程值越稳定,PID 参数就越容易计算,结果的精度也会越高。
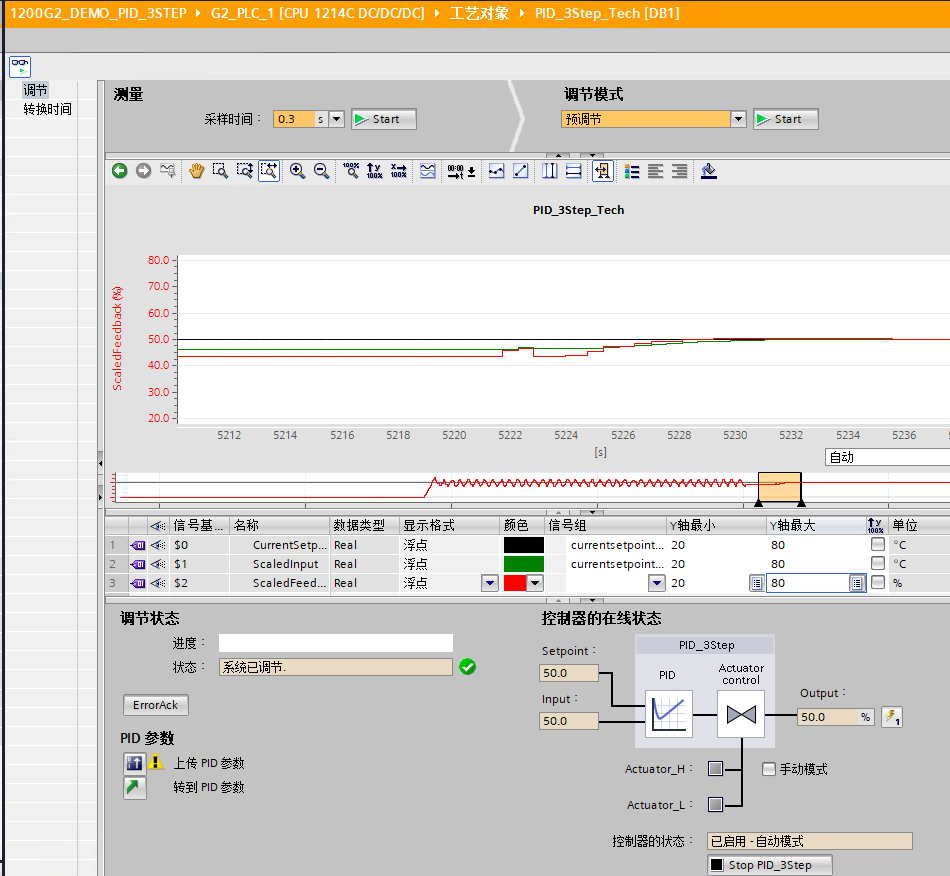
图2 预调节 V2
预调节启动条件:
- 现场设备已经准备好调节,执行器已经手动测试正常运行;
- 已在循环中断 OB 中调用 PID_3Step 指令,并正确连接管脚;
- ManualEnable = FALSE;
- Reset = FALSE;
- 已对电机转换时间进行了组态或测量;
- PID_3Step 处于下列模式之一: “未激活”、“手动模式”或“自动模式”;
- 设定值和过程值均处于组态的限值范围内。
预调节步骤:
点击采样“Start”按钮,开启过程值更新;
点击预调节“Start”按钮,开始预调节过程;
待进度完成,状态更新为“系统已调节”,完成调节过程;
点击 按钮,上传预调节参数到项目,并下载程序到 PLC。
按钮,上传预调节参数到项目,并下载程序到 PLC。
3. PID_3Step V2 精确调节
精确调节将使过程值出现恒定受限的振荡。根据该振荡的幅度和频率,针对工作点调整 PID 参数。所有 PID 参数均根据结果重新计算。 精确调节得出的 PID 参数通常比预调节得出的 PID 参数具有更好的主控和扰动特性。
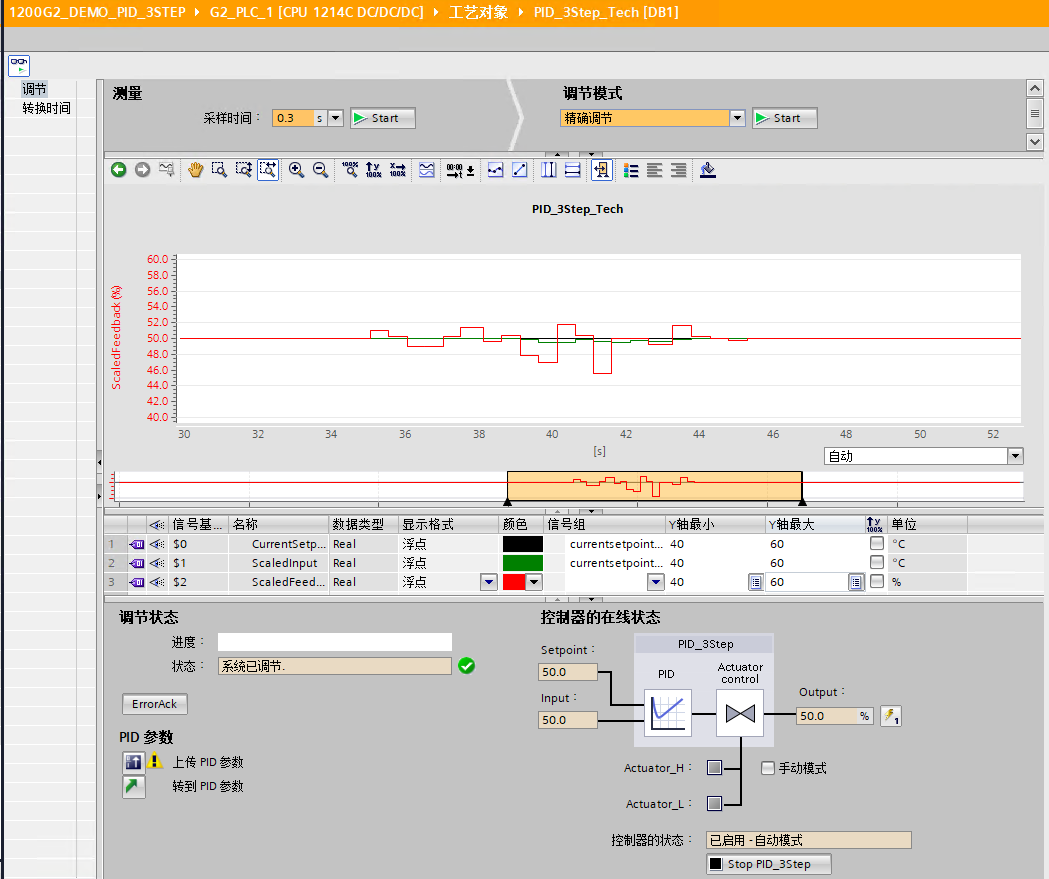
图3 精确调节 V2
精确调节启动条件:
- 现场设备已经准备好调节,执行器已经手动测试正常运行;
- 已在循环中断 OB 中调用 PID_3Step 指令,并正确连接管脚;
- ManualEnable = FALSE;
- Reset = FALSE;
- 已对电机转换时间进行了组态或测量;
- PID_3Step 处于下列模式之一: “未激活”、“手动模式”或“自动模式”;
- 设定值和过程值均处于组态的限值范围内;
- 在操作点处,控制回路已稳定。过程值与设定值一致时,到达操作点;
- 不能被干扰。
精确调节步骤:
- 点击采样“Start”按钮,开启过程值更新;
- 点击精确调节“Start”按钮,开始精确调节过程;
- 待进度完成,状态更新为“系统已调节”,完成调节过程;
- 点击
 按钮,上传预调节参数到项目,并下载程序到PLC。
按钮,上传预调节参数到项目,并下载程序到PLC。
注意:本测试基于仿真工艺对象运行。仿真系统稳定,实际现场情况多变,自整定可能会经历更长的整定时间,或多次整定才能达到理想的结果。
更多内容可访问:

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







{{item.nickName}}