


















 西门子官方商城
西门子官方商城
- {{item.name}}
更多

PID_3Step V2 使用PLCSIM仿真

发布时间:2025年12月22日
- 0
- 256
本章节讲解 S7-1200 G2 PID_3Step V2 使用 PLCSIM 仿真
1.PID_3Step V2 使用 PLCSIM仿 真
PLCSIM 支持针对 S7-1200 G2 仿真 PID_3Step V2 。
与“真实”PLC 相比,仿真 PLC 的循环中断 OB 的实际循环时钟波动可能更大。
为防止因采样时间报错而出现的异常,应注意设置以下变量:
- CycleTime.EnEstimation = FALSE
- CycleTime.EnMonitoring = FALSE
- CycleTime.Value:以秒为单位,为此变量设置调用循环中断 OB 的周期时钟。
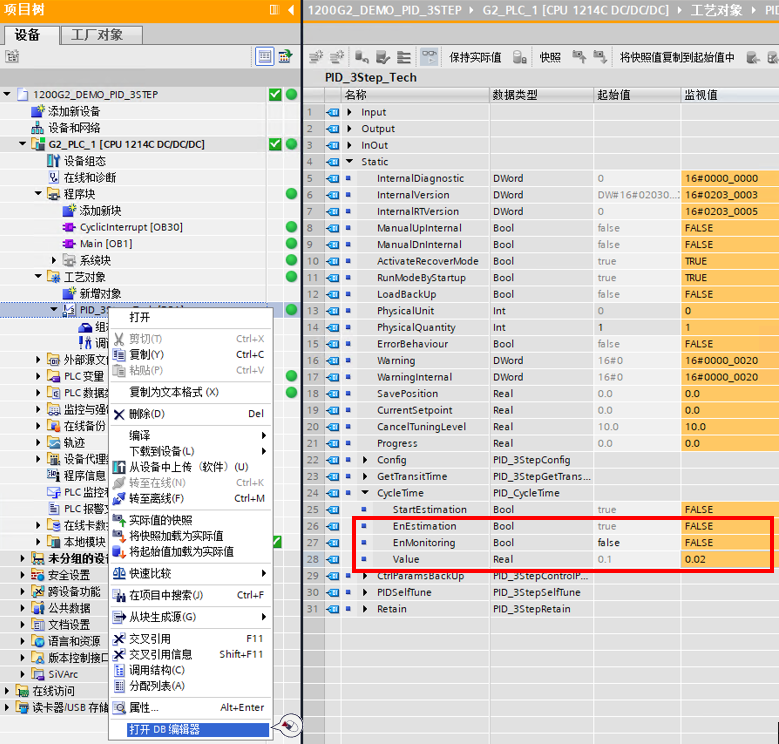
图1.1 PID_3Step 工艺对象 DB 编辑器
2.PID_3Step V2 使用 PLCSIM 仿真

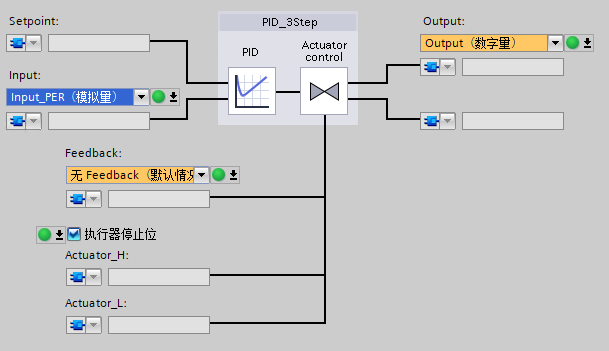
图2.1 PID_3Step 指令及组态
可以使用 PLCSIM 仿真观察 PID_3Step 的行为:
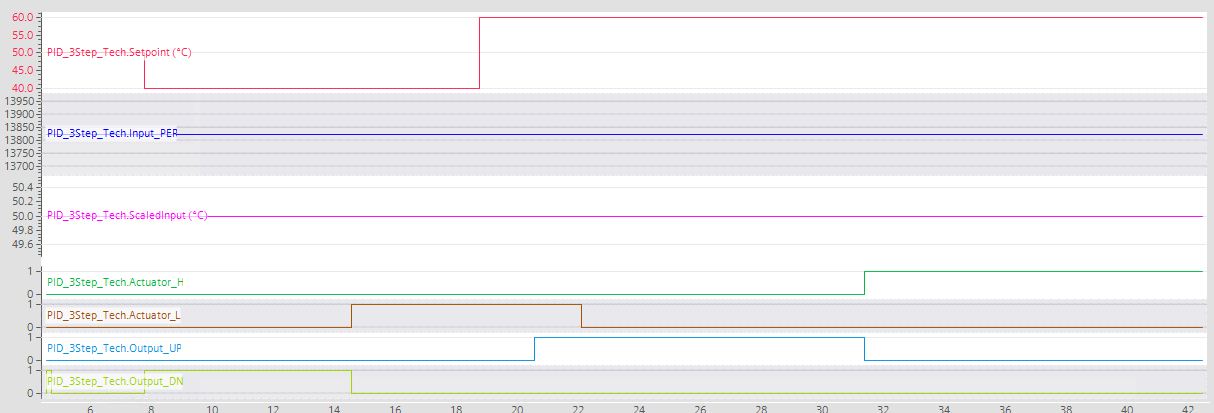
图2.2 PID_3Step 仿真曲线
PID_3Step 组态及连接 Input_PER; <TO>.ScaledInput 为过程值标定转换后的反馈值。
<TO>.Setpoint > <TO>.ScaledInput, 基本设置未启用反转控制逻辑,<TO>.Output_DN 输出;
执行机构到达下限位,输入信号<TO>.Actuator_L 置位,DN 输出复位;
<TO>.Setpoint > <TO>.ScaledInput, 基本设置未启用反转控制逻辑,<TO>.Output_UP 输出;
执行机构到达上限位,输入信号<TO>.Actuator_H 置位,UP 输出复位;
本次仿真未连接被控对象及反馈。仅仿真 PID 的设定值、反馈值以及输出的行为;
如需要带被控对象及反馈的仿真效果,可参考 1500 3Step 仿真示例,但使用仿真整定的 PID 参数不能用于实际现场:
PID_3Step 带仿真对象的示例:链接
更多内容可访问:

- 评论
更多
-
分享
扫码分享
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错







{{item.nickName}}