



















 西门子官方商城
西门子官方商城
- {{item.name}}
更多
常问问题
 5.0 分
5.0 分
SIMOTION 工艺对象 Alarm 配置
文档编号:F0693|
文档类型:常问问题|
发布时间:2024年01月24日
- 1
- 1236
- 1052
1 工艺对象的报警 如果SIMOTION的工艺对象发生了一个错误,那么该对象就会产生一个工艺报警。在系统中可同时产生最多160个工艺对象报警。以下是在工艺对象的编程中可能产生的错误: • 工艺......
1 工艺对象的报警 如果SIMOTION的工艺对象发生了一个错误,那么该对象就会产生一个工艺报警。在系统中可同时产生最多160个工艺对象报警。以下是在工艺对象的编程中可能产生的错误: • 工艺......
1 工艺对象的报警
如果SIMOTION的工艺对象发生了一个错误,那么该对象就会产生一个工艺报警。在系统中可同时产生最多160个工艺对象报警。以下是在工艺对象的编程中可能产生的错误:
• 工艺对象本身不能执行应用所需的功能或者报告某些事件和状态时:
会输出一个工艺报警
• 对工艺对象施加的命令不能被执行时:
命令的返回值会提供关于原因的信息
• 当访问配置数据,系统变量或I/O变量时出错:
调用“ExecutionFaultTask ”
2 报警的作用
工艺报警会在系统中引起响应,有以下两种响应:
• Local response : 作用于产生故障的工艺对象本身• Global response : 作用于其他工艺对象或者执行系统
对于每一个报警,相应的反应有默认的设定。但是,可以调整这些设定来满足实际需求:
• 通过指定”error activation”,可以定义报警是立即激活、错误重复出现后激活,还是经过一段时间后激活。• 可以屏蔽一些报警
3 报警的配置说明
打开EXECUTION SYSTEM -> SystemInterruptTasks->TechnologicalFaultTask -> Alarm configuration, 弹出如下界面(图1,图2):
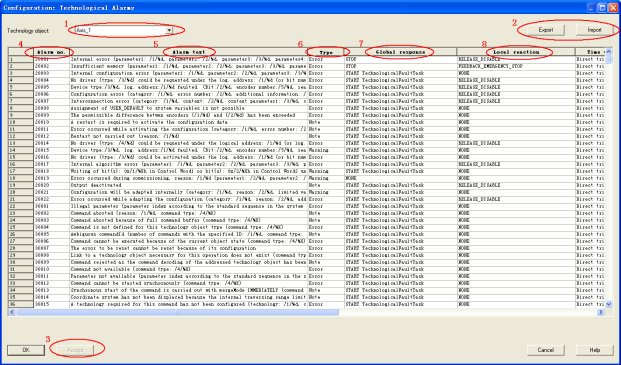
图1
(1) 选择要配置报警的工艺对象(轴,CAM,外部编码器等),可以选择所有轴或者单个轴。
(2) 点击“Export”/“Import”按钮,可以将工艺报警的配置以XML格式导入/导出。
(3) 接受对所有报警配置的修改
(4) 工艺报警编号
(5) 报警文本显示
(6) 类型共有4种,分别为Note、Error、Warning、Hidden。如设置为“Hidden”类型,报
警信息不会显示。
(7) 全局响应的设置(Global response)
在这里可以设置工艺报警触发时,执行系统或其他工艺对象是如何响应的。可设置的响应类型如下:
>NONE:系统不做任何响应。
>STOP:系统进入STOP模式,在STOP模式下,所有工艺对象处在非激活状态,用户程序不再执行并且所有输出为0.
>STOP U:系统进入STOP U模式,工艺对象仍为激活状态并且可以进行测试和调试。其他方面,等同于STOP模式。
>START TechnologicalFaultTask:当报警触发时,“TechnologicalFaultTask”被执行。分配给此任务的程序开始运行。如果在“TechnologicalFaultTask”中没有分配程序,则系统进入STOP模式。
(8)本地响应的设置(Local reaction)
决定了报警的工艺对象本身接下来会执行何种动作。例如,当一个定位轴产生工艺报警时,可以选择是立即取消该轴正在执行的指令或者令轴按照指定的斜坡停车。根据工艺对象的不同,local reaction会有不同的设置,下面以轴为例介绍:
> NONE:无反应
> DECODE_STOP:正在执行的命令被停止;当前运动和motion buffer中的命令继续执行;新运动指令被拒绝。
> END_OF_MOTION_STOP:在激活的运动命令完成之后停止
> MOTION_STOP:按照指令中设定的值停车
> MOTION_EMERGENCY_STOP:按照最大加速度极限值停车
> MOTION_EMERGENCY_ABORT:按照最大加速度极限值停车并且取消激活的指令
> FEEDBACK_EMERGENCY_STOP:按照快速停车的斜坡停车并且取消激活的指令
> OPEN_POSITION_CONTROL:按照速度设定值为0停车并且取消激活的指令
> RELEASE_DISABLE:轴去使能停车并且取消当前激活的指令
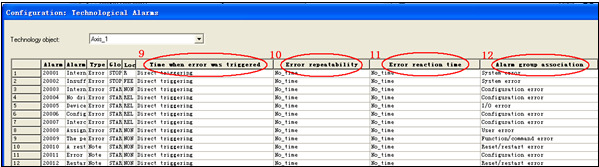
图 2
(9)Time when error was triggered
当故障发生时,选择如何或者何时触发报警,可设置的选项如下:
> Direct triggering:在错误发生后,报警响应被直接执行。
> Delayed triggering:报警响应经过延迟后被执行。在” Error repeatability ” 或者” Error reaction time ” 中,选择报警触发在错误发生几次或是经过一段时间之后。
(10)Error repeatability
选择错误重复多少次之后报警响应被执行。
> no_time:当错误发生时报警立即被激活。
> time_n:当错误重复出现n 次之后,报警被激活。
(11)Error reaction time
选择错误发生与报警响应触发之间的时间间隔。
> no_time:当错误发生时报警立刻触发。
> time_n:错误发生后经过n 毫秒报警被触发。
(12)Alarm group association
显示TO报警被分配的相应报警组。
4 报警响应的配置示例
以轴报警”40003: Programmed acceleration(type: /1/%d)is limited”为例,当轴运动时的加速度设定值超过TypeOfAxis.MaxAcceleration.maximum中的值时,会触发此报警,该报警的默认设定如下图3:

图 3
A、Type:Note
B、Local Reaction:None
按照默认设定,当轴的设定加速度大于极限加速度时,报警会以”Note”的形式出现,但不会对轴进行任何额外的操作,轴仍旧会继续运动。报警显示如图4:

图 4
修改A、B处的报警配置,Type:Error,Local Reaction:MOTION_STOP,如图5所示:

图 5
则当轴的设定加速度大于极限加速度时,报警会以”Error”的形式出现,同时轴会按照指令中设定的减速度停车,报警显示如图6:

图6
关键词
SIMOTION,工艺对象,配置,报警响应。


- 评论
更多
-
分享

手机扫码分享文档(需在手机端重新登录账号)
- 收藏 收藏
- 点赞 点赞
- 纠错 纠错





.jpg)
 关联文档
关联文档
- 如何在SIMOTION程序中读写工艺对象的配置数据
- 如何在HMI上显示Simotion 工艺对象的报警信息
- 如何通过TSI获取工艺对象的报警代码及信息
- PLC工艺对象中的V90 编码器数据设置
- S7-1500(T)通过工艺对象连接 S200实现位置控制(使用GSD文件)
- S7-1200G2/1500 PLC连接SINAMICS S200组态工艺对象参数设置注意事项
- S7-1500(T)通过工艺对象连接 S200实现位置控制(使用Startdrive 文件)
- S7-1200G2 连接 S200 PN通过工艺对象实现定位控制(Startdrive)
- S200工艺对象的回零方法
- 如何拷贝SIMOTION轴的配置数据






{{item.nickName}}