| 作者 | 主题 |
|---|---|
|
看雪001 至圣 
经验值:19338 发帖数:2076 精华帖:72 |
楼主
主题:国产机器视觉的使用体验
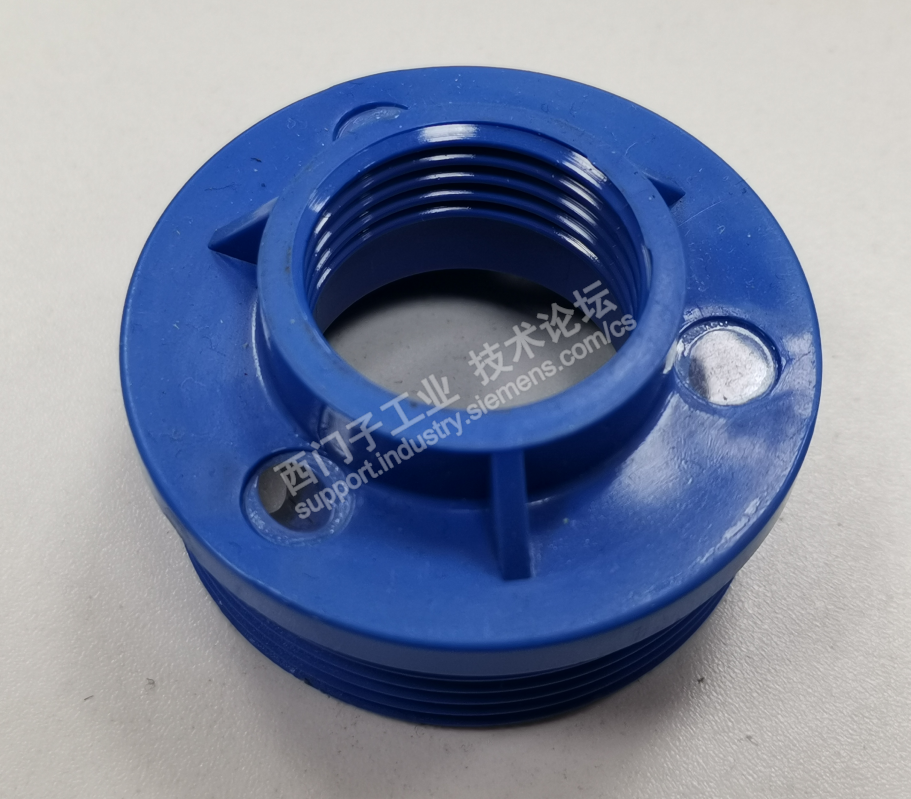
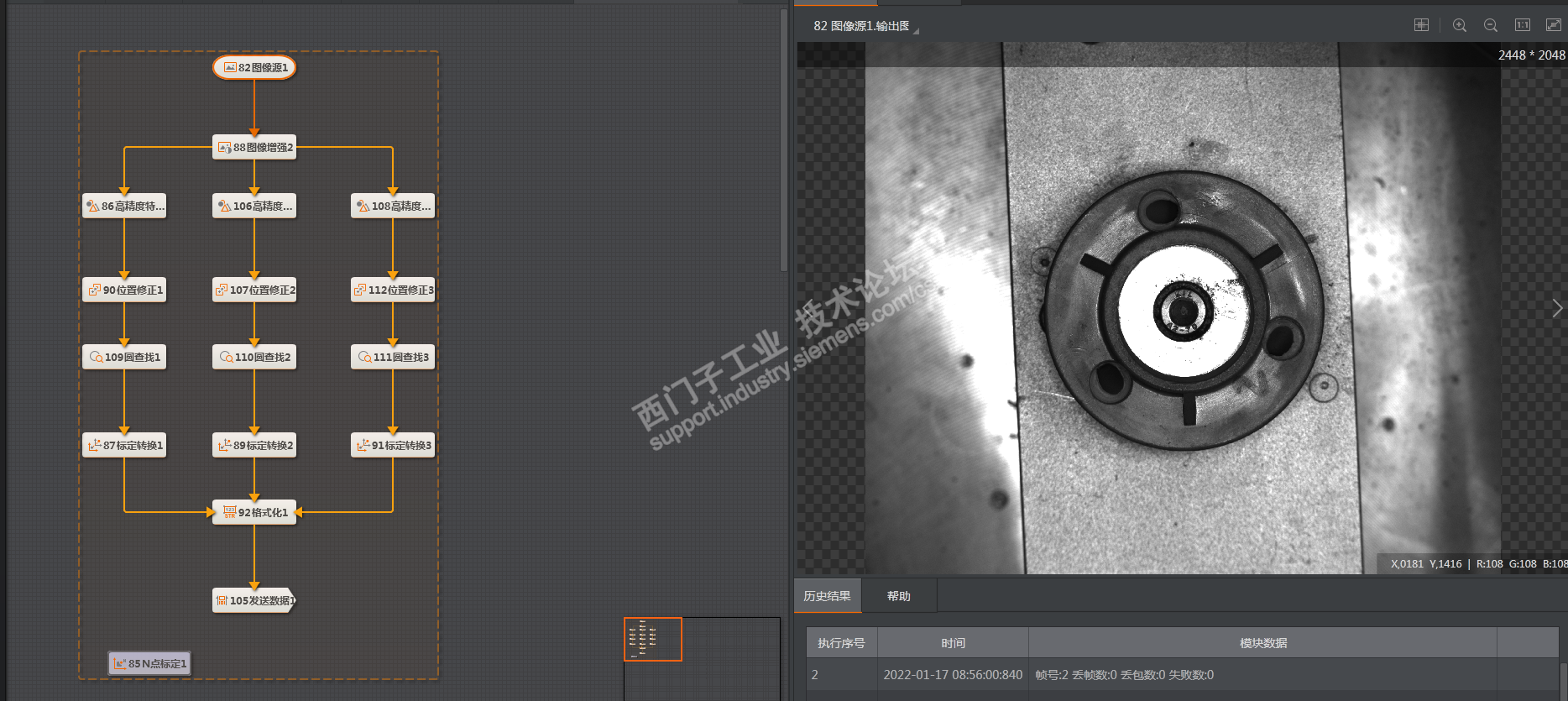
卤煮正在做一个点胶贴片的case,原材料就是如上图所示,要将3个透明PP薄片贴到图中的3个圆形孔位上,要求贴片误差小于0.1mm。 由于注塑件工艺问题,这个产品3个孔位在120°分布位置误差本身就超过了0.2mm,加上不同批次的影响,机器人不能按照固定位置完成贴片,初次尝试使用国产视觉软件引导定位坐标。 于是,选好相机、镜头、光源,一番倒腾安装,采集到的原始图片:
为了突出目标区域的特征值,在图像采集后紧跟一个”图像增强“:
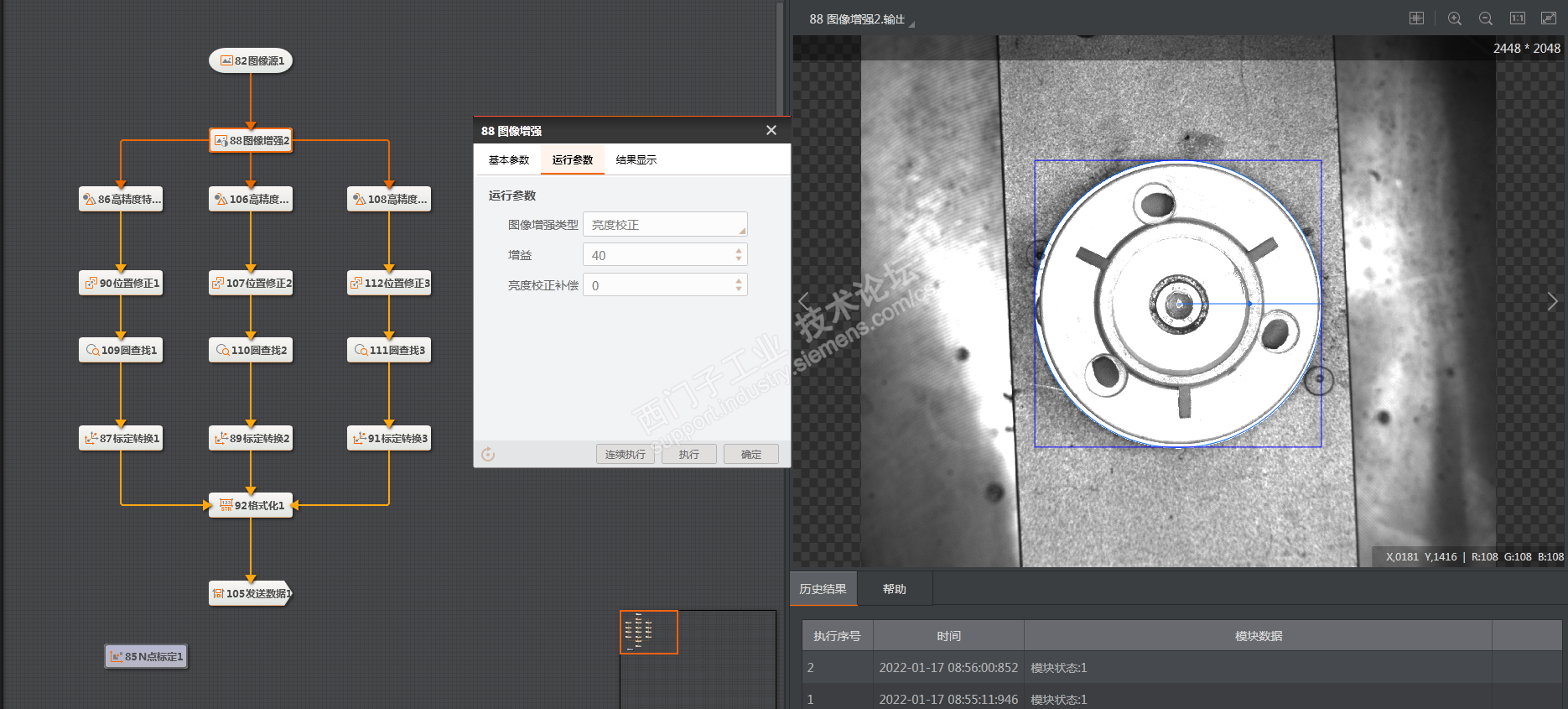
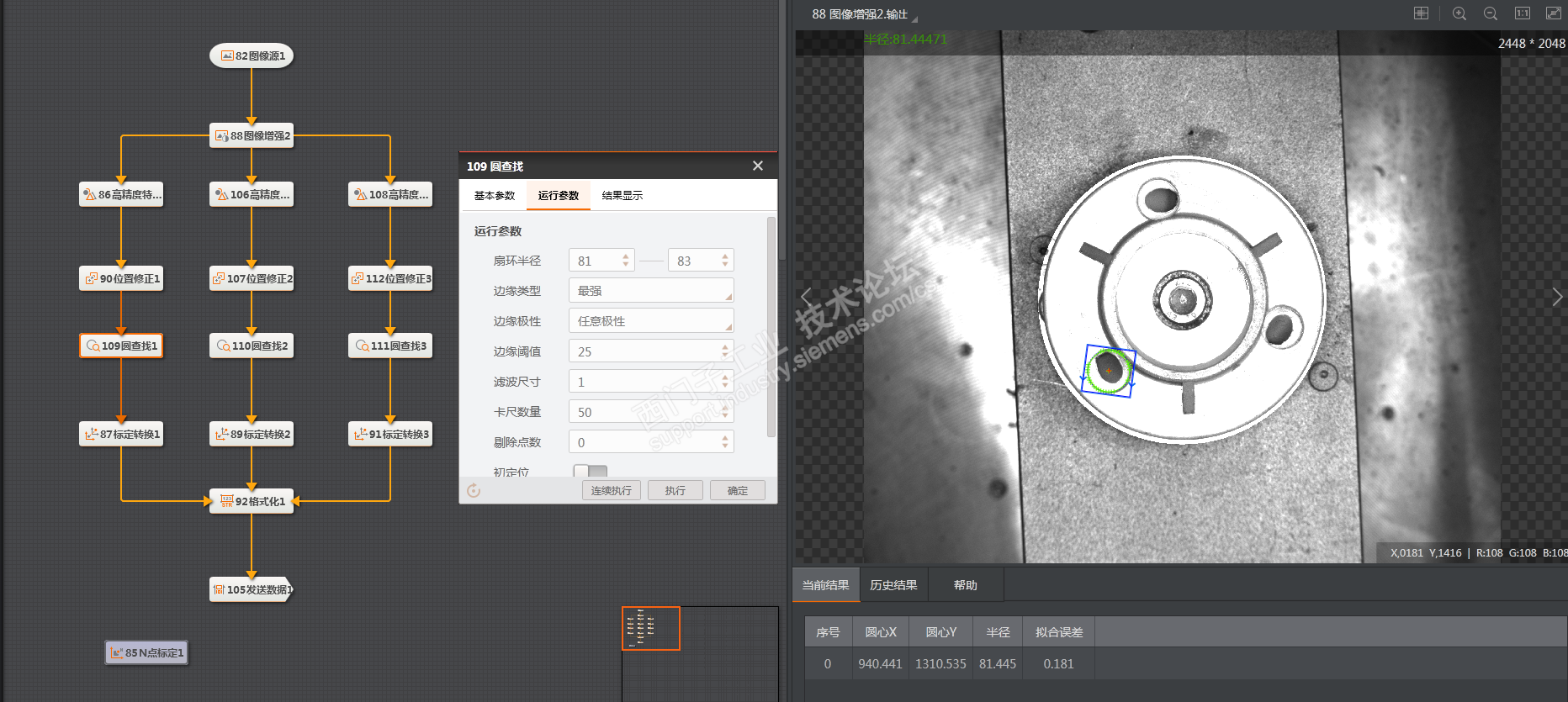
用3个支路,分别抓取3个定位孔的像素坐标:
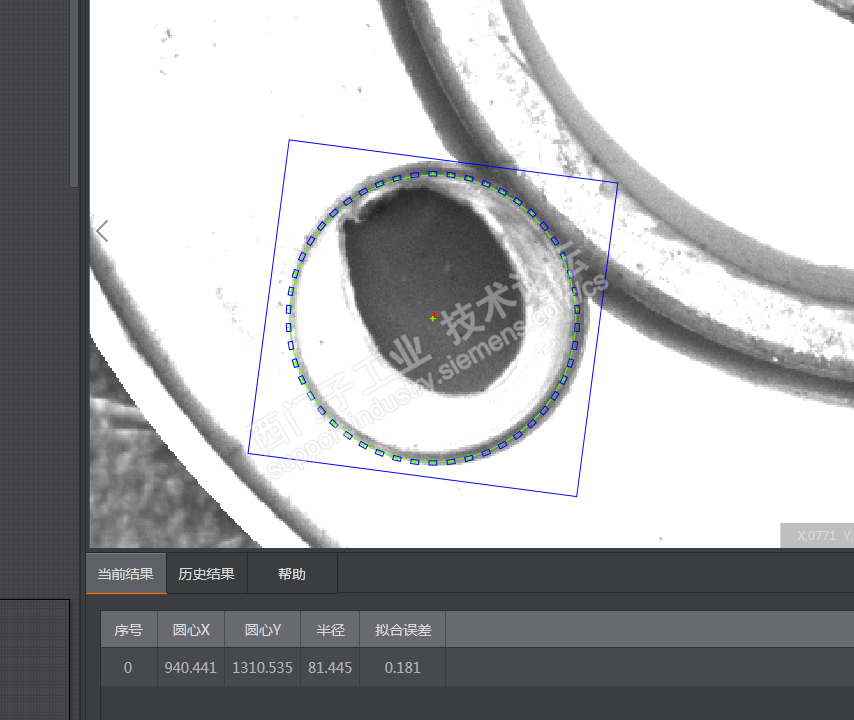
放大工具执行流程,可以看到圆形查找拟合效果:
当前结果里显示的数字单位都是”匹克素(Pixel“,拟合误差0.18个像素,这到底是多大的物理尺寸?
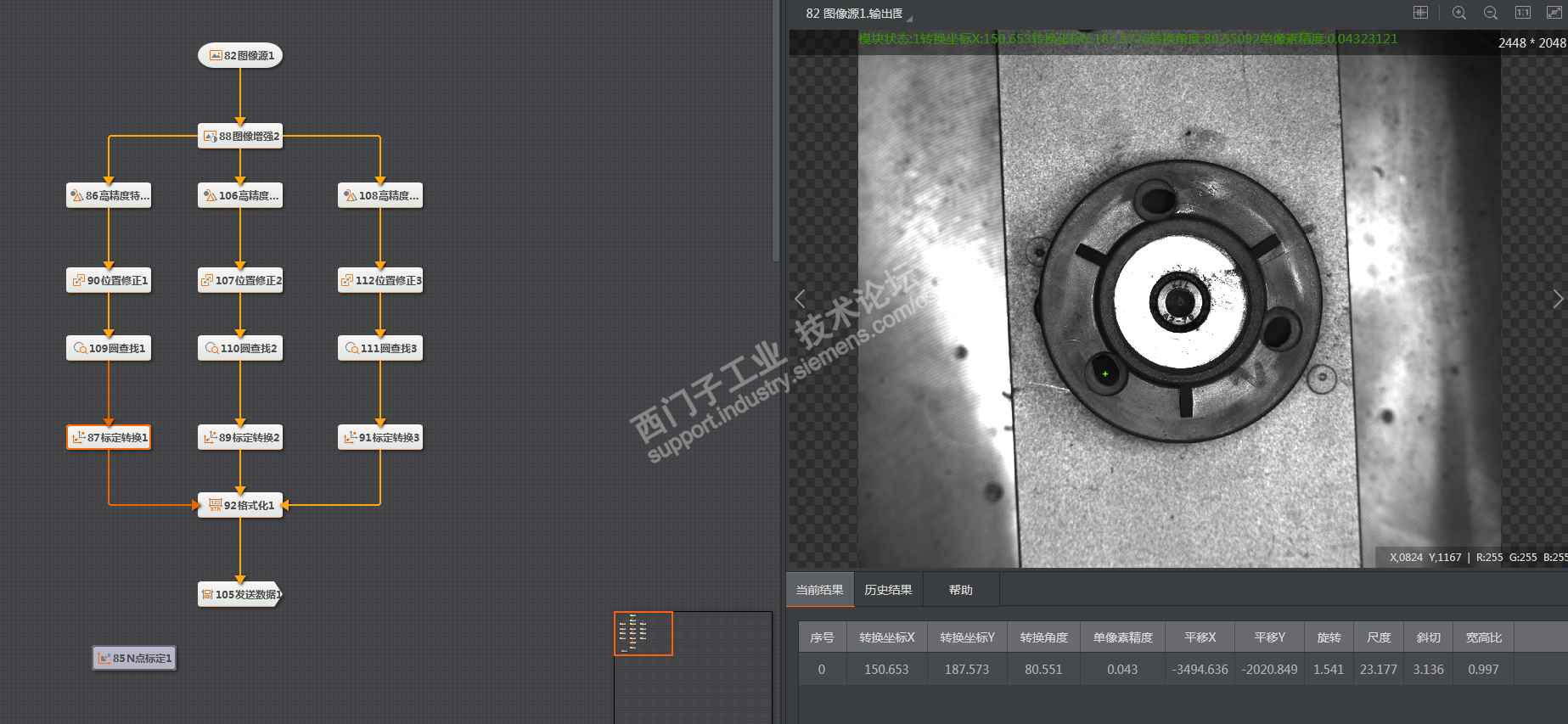
经像素坐标与物理坐标的标定转换后,获得了第一个孔位圆中心对应的机器人坐标,单位mm,单个像素的物理尺寸是0.043mm,圆形拟合误差即便是1个像素,最大误差也就0.043mm,理论上得到的数据还是令人满意的。接下来要做的就是把视觉软件获取的3个孔位坐标打包,传送给plc或者机器人:
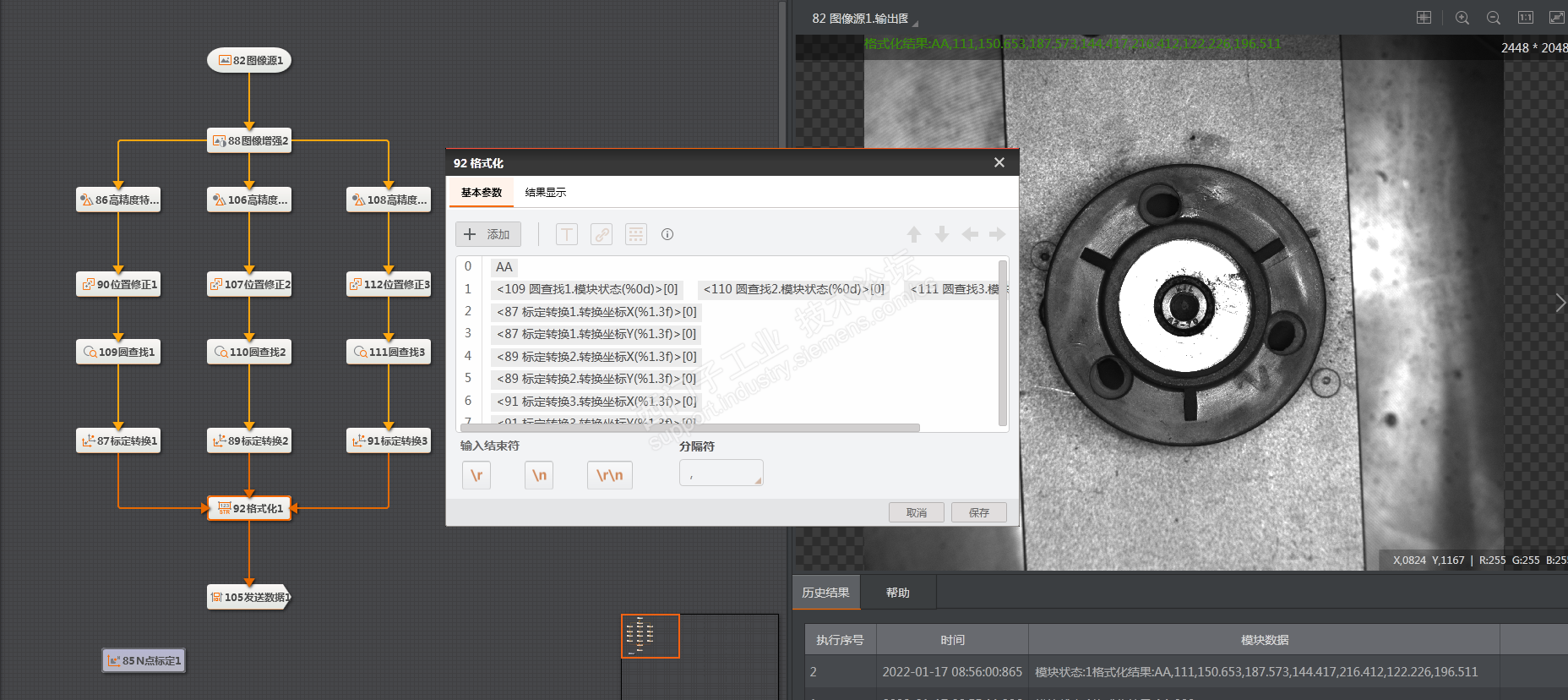
数据打包定义了简要格式,数据第一位”AA“表示通信代码;数据第二位”111“表示3个孔位拍照识别的状态,如果有1个为0即表示拍照识别失败,PLC可以根据该结果要求视觉软件重新拍照;数据第三位开始才是3个孔位的XY坐标值;
最后是将数据发送给预先设置的通信信道。 客户并不知道自己的原材料尺寸超差,我们的团队在调试过程中贴片的效果总是不能达标,排查各种机械安装、程序设计等问题后,才最终锁定原材料的影响,和客户反复沟通的结果是无法管控原材料的超差,只能靠下游设法解决。还好,虽然过程曲折,现在总算轻舟已过,引用航天员的话: 我已出关,感觉良好。
大道至简,知易行难
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城















 短信登录
短信登录
