| 作者 | 主题 |
|---|---|
|
Eamonyin 游侠 经验值:467 发帖数:35 精华帖:1 |
楼主
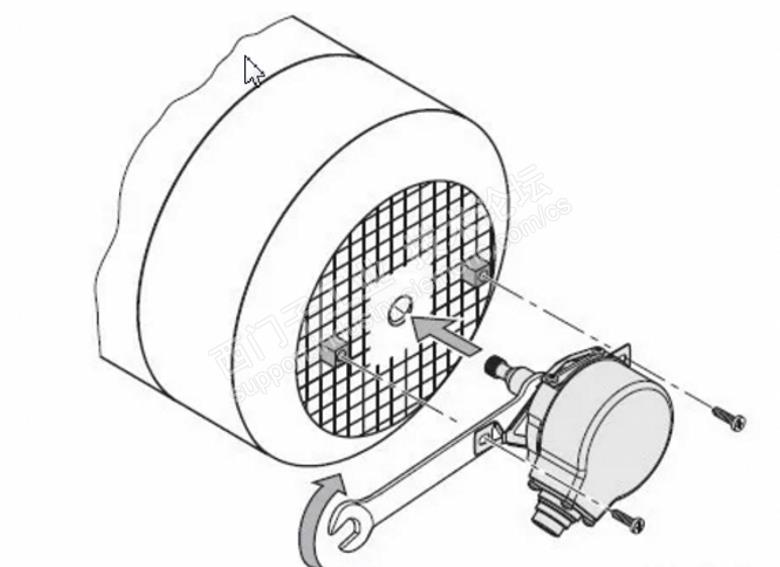
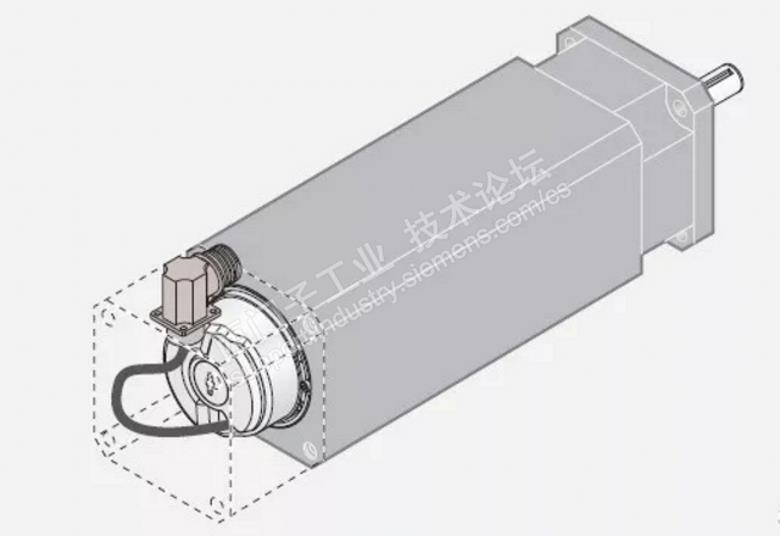
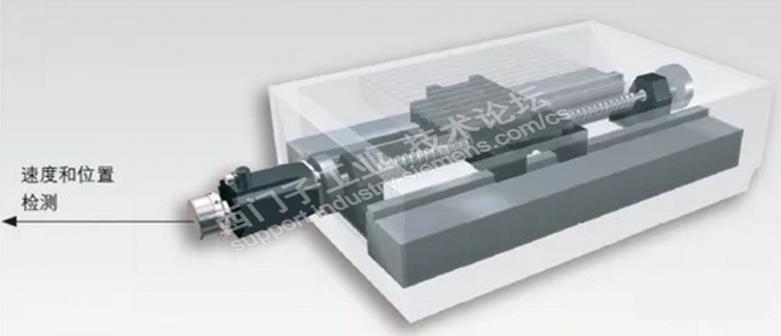
主题:论运动控制中绝对值编码器的安装位置和作用 第一部分:电机尾部安装的编码器
电机尾部的编码器首先是为电机驱动器反馈信号的。 变频电机尾部的编码器对变频器是速度闭环反馈。 伺服电机尾部的编码器对伺服驱动器是位置闭环反馈。 1、变频电机上的编码器: 速度——积分到位置,对系统是半闭环。 变频电机尾部安装编码器好处是直接反映电机的转速动态性能,作为相位频率、电流-力矩-加速度的电机驱动的调速与矢量控制闭环。 变频电机尾部的编码器就是变频器调速的速度闭环,如果变频器没有PG卡,它仅仅是调速的闭环,而对于上位控制器(PLC等)的位置环是依赖于速度对时间轴上积分的。 变频器如果增加了位置控制卡PG卡后,可以有变频器上直接的电机位置闭环。但是变频电机都是依赖于机械传动装置带动负载端,这种电机位置闭环仅仅是反映在电机高速旋转中的位置值,而不是经过传动减速后低速负载端的真实位置,这种位置闭环称为半闭环。这种闭环因变频电机减速传动装置而误差较大。 因此,变频电机(包括具有伺服功能的异步伺服电机)尾部的编码器,基本上是速度闭环为主,以增量编码器为主。 2、伺服电机上的编码器
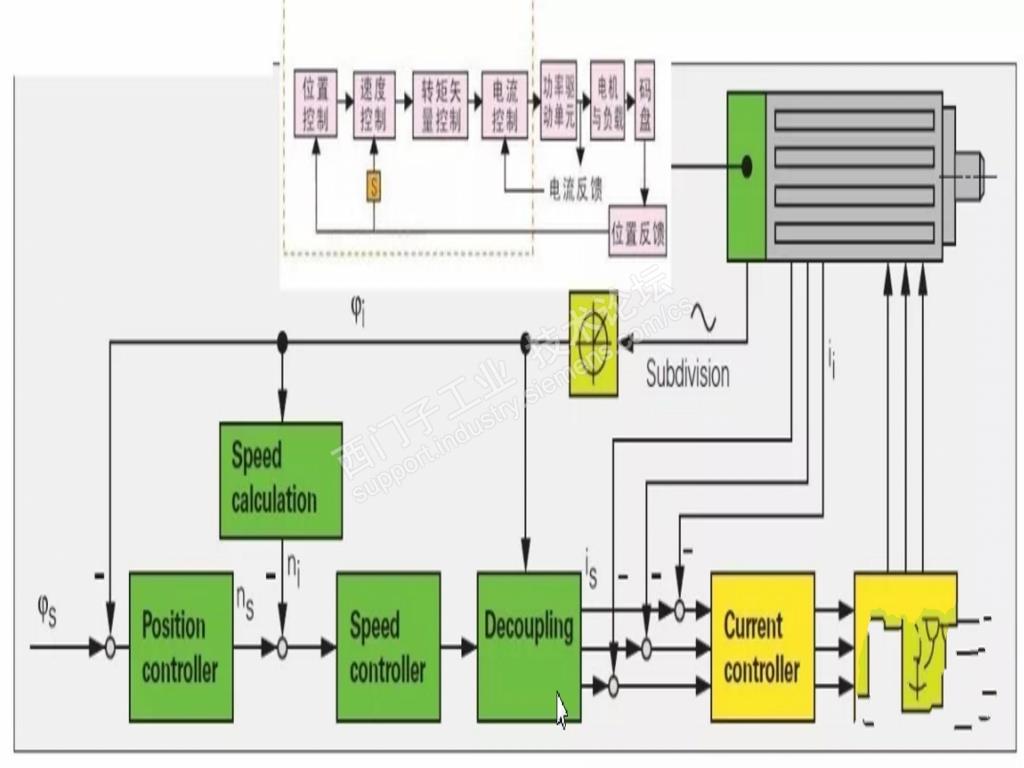
位置--微分到速度,电机位置,对系统是半闭环。 伺服是天然的位置闭环。伺服电机设计的就是位置、速度、电流力矩的闭环。编码器同步反馈电机转子的位置,并在时间轴上微分到速度环。因此无论是控制中取速度环优先还是位置环优先的控制策略,其编码器反馈给伺服控制器的原始信息就是位置环。
这种闭环是针对电机的闭环,在速度上真实反映电机的转速与电机相位,这有利于驱动器根据反馈快速调制驱动,但是对于传动后终端的位置控制是半闭环的,中间隔了机械传动: 1, 多级机械传动间隙误差的不确定性,负载变化带来传动“弹性”的不确定性; 2, 传动机械磨损的调试磨合期长,传动可能发生的机械损坏没有反馈,所带来的安全性不确定。 因上述的不确定性无法避免的定位误差,调试过程中的参数调试的不确定,使用磨合后的技术人员二次返回重新调整参数需再修正,这大大增加了调试人工成本。 3, 原点位置丢失。目前大部分的伺服电机尾部编码器都是增量编码器,或者是单圈绝对值编码器,机械式绝对值真多圈编码器的体积较大,并且量程圈数4096圈,往往不够电机实际转数。目前绝对值机械多圈编码器还较少直接装在伺服电机尾部。目前的伺服电机尾部增量编码器依赖于机械终端加装原点开关,而单圈绝对值编码器依赖于多圈计数器并保存累加数值,并用各种方法掉电保存数据。包括用电池、超级电容或者微弱自“发电”的韦根线圈。但其实这些都不是真实多圈绝对值编码,在计数累加圈数的过程中一旦被干扰,或者在停电后微弱的低功耗工作监测圈数的变化时被干扰(编码器停电低功耗工作时的信号很微弱,被干扰的几率增加),一旦被干扰而圈数误加错误,是无法判断的。这将发生原点丢失的错误。所以这种拿单圈绝对值当多圈编码器的用法,因仍然存在原点丢失的可能性而失去了“绝对值”的意义。只是相对于增量编码器而言,这种丢原点的概率降低了很多。
需要提醒的是,有一些编码器厂家用韦根计数的电子多圈伪绝对值与机械多圈的真绝对值编码器混为一谈,隐瞒了电子多圈计数一旦出错误加无法识别的致命缺陷。
真绝对值多圈编码器在调试后保存原点位置,原点位置是永久性的。不应再发生有时原点在,有时又丢原点位置又需要重新找原点的情况。如果发生这种丢原点位置,那是假绝对值多圈编码器。
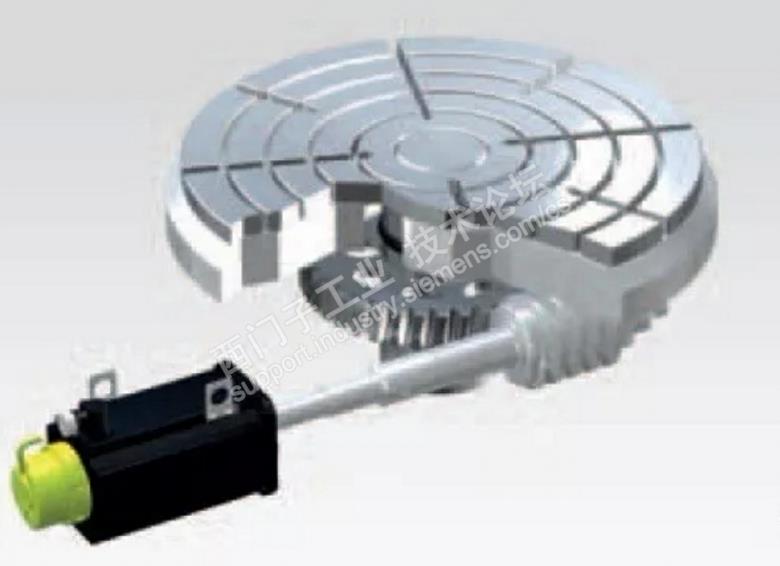
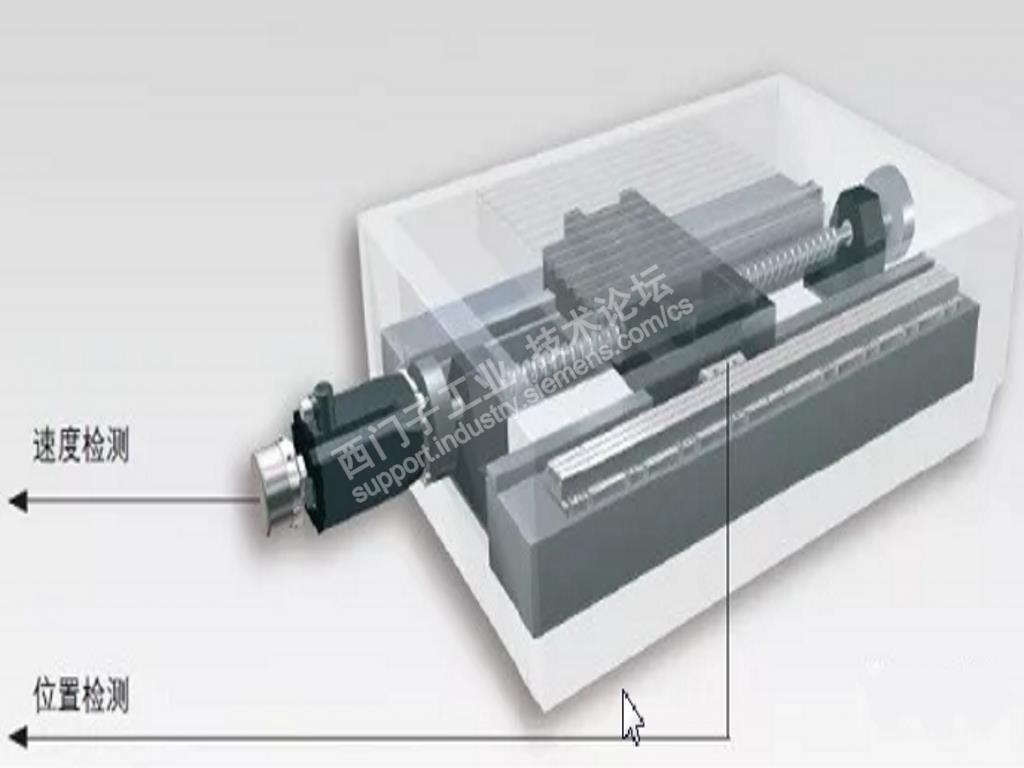
半闭环上的不确定性,就意味着系统位置控制精度较低,降低了自动化效率,现场不确定成本将会增加。或者机械损坏及原点丢失带来的安全性问题,尤其是最终用户生产中停机及故障检修损失。 第二部分:第二编码器——全闭环编码器 全闭环是指在伺服电机尾部的编码器以外,在机械终端再加装了第二编码器,对应控制要求的终端位置直接的编码器位置反馈。例如安装直线光栅尺与大孔径编码器。这样伺服编码器与全闭环编码器两个编码器做了专业分工:伺服电机尾部的编码器专管电机的速度反馈闭环和电机相位的反馈,信号连接伺服驱动器,而机械终端的第二编码器反映的是运动轴控制目标的真实位置闭环,信号连接PLC或者同步控制器。 更重要的是在多运动轴做同步控制时,能够更确定的反馈各轴位置控制目标的相互位置关系,同步加工有更确定性。
从第二编码器最初的任务位置闭环来看,全闭环编码器最好就是用全行程绝对值编码器,不会发生原点丢失的问题。如果多轴运动中只要有一轴发生原点位置错误,多轴系统就乱了而不得不停机,人工干预找出是哪一轴发生了错误,并手动回归原点。所以多轴同步运动控制从使用效率和安全性而言,必须要有绝对值编码器做原点位置不丢失的保障。
但是全闭环的第二编码器由于是与终端位置直接连接反馈的尺寸,编码器的尺寸依据实际需求而需定制化,这限制了规模化生产,而且如果再要求是绝对值编码器,它的成本很高。由于难以大批量化,其高品质管理要求同样带来高成本,而机械安装要求的高精度,维修停机时间长。 全闭环,成本高,直接到机械刚性连接的对加工精度与安装精度要求很高,达不到要求极易损坏。 第三部分:直驱电机的全闭环编码器 直驱电机是没有机械传动的直接驱动终端位置控制,这样电机尾部的编码器直接就是全闭环编码器。它相当于半闭环系统里的第二编码器。直驱运动系统值得发展,也是必然的发展趋势。但直驱电机的电流环控制的要求很高,因为没有了传动装置的缓冲,电机的抖动将直接反映在终端加工端。直驱电机要做好一致性难度较大,目前普及的路途有点远。而且与上述全闭环第二编码器的情形一样,目前直驱电机的专用尺寸的绝对值编码器还是成本较高,包括维护成本。
一个好的选型是项目成功的一半
|










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城














 短信登录
短信登录
