传统速度、电流双闭环控制系统一般由两个PI调节器构成速度和电流调节系统(电流环相对于速度环可以等效为一阶惯性环节)。当电机承受突加负载时,由于转速下降,转速负反馈信号变小,转速调节器输出的电流给定值上升,力图通过电流调节器使功率柜输出电压上升,使电机机械特性往上平移,让电机转速回到原设定值上去。另一方面,电枢电流的迅速上升(速度下降反电势减小了),电流负反馈信号加大,它力图通过电流调节器使功率柜输出电压降低以遏制电流的增大。上述两个调节作用是矛盾的,由于电流环的响应时间比速度环短得多,后一作用来得快,从而延缓了电磁转矩增大的速度,拖长了到达转矩平衡的时间,也就加大了动态速降的幅度。一直要等到速度调节器输出的电流给定信号积分升到超过冲击负载引起的电流反馈增量之后,电流调节器的输出才会转为上升,使整流输出电压升高。在这之后,电枢电流才会增大,才能产生较大的电磁转矩,首先用于平衡负载转矩,使减速过程停止,然后再上升超过负载转矩,让转速恢复到原设定值上去。因此我们可以看出,传统速度、电流双闭环系统的两大缺陷:
1、电流调节闭环中电流负反馈的调节作用对于转速的变化是起“正反馈”作用的,它使动态速降进一步加大,恢复时间延长。
2、速度调节器输出的电流给定值首先用于产生克服负载转矩的电流,然后再用以去产生加速电流去克服速降,也就是动态速降的恢复时间拉长了。
所谓负载观测器就是在实际速度发生变换时,估算出负载大小并作为电流环的附加给定进行补偿,不经过速度环的调节。因此速降的幅度和恢复时间都可以大大缩短。
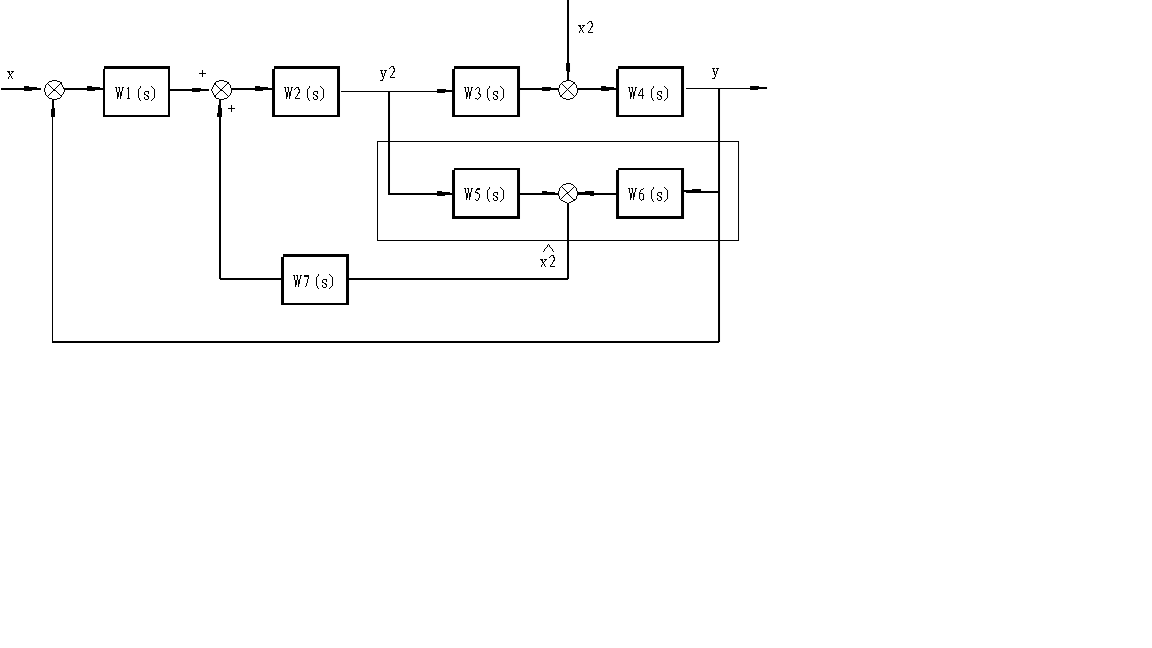
图中:
x - 电机转速给定
x2 - 负载力矩
x2- 负载力矩估计值
y2 - 给定电流值
y - 电机实际速度值
W1 - 速度环
W2 - 电流环
W5、W6、W7需要根据系统结构和参数构造。
在有些大传动装置上有负载观测功能,我试图在直流装置上用DCC实现这一功能,但没成功,并不是原理的问题而是具体实现过程的一些细节。这里把这个话题提出来,看看各位是否兴趣和经验。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金




 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐



















 短信登录
短信登录
