| 作者 | 主题 |
|---|---|
|
WWCWWC 至圣 
经验值:72843 发帖数:8227 精华帖:145 |
楼主
主题:S7-1214C与第三方步进电机的组态及编程 
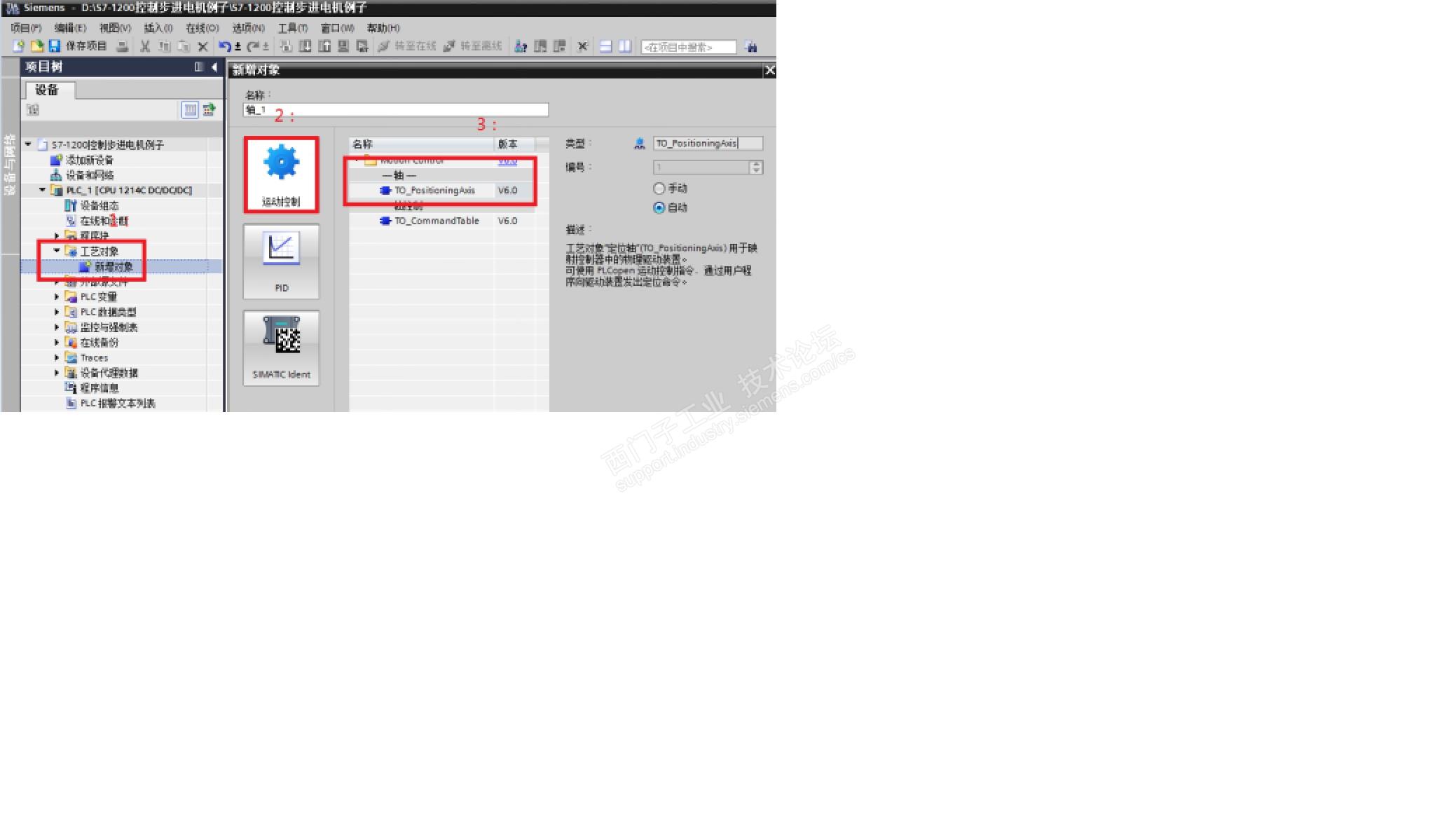
S7-1214C与第三方步进电机的组态及编程 自S7-1200的PLC面市以来,一直没有找个机会自己亲手验证一下S7-1214C与步进电机的组态及编程,之前做过第三方连接步进电机的项目。主要原因还是硬件条件的不满足,这不,机会来了。前不久,在给工厂修理一台激光刻字设备时,遇到某运动轴用的是雷赛86HS80步进带刹车电机故障。虽然最后通过仔细调整刹车间隙,搞定的设备的故障。但是,为确保以后再次遇到类似的问题,而无法及时提供设备备件前提下,耽误生产,我还是提前预订了一个第三方的步进电机及驱动器。这样也给我验证创造了硬件条件,待有时间验证一下,S7-1200是如何与第三方步进电机实现硬件组态及编程的。 硬件: 1) 一个S7-1214C DC/DC/DC,订货号:6ES7 214-1AG40-0XB0 2) 一个86系的步进电机+相应的驱动器 3) 一个20A的西门子24V电源(步进驱动器及plc电源) 4) Portal V15版本 组态及编程: 1) 创建一个验证项目,添加cpu( S7-1214C),双击“工艺对象”,选择“运动控制”的TO_PositioningAxis V6.0版本:
2) “确定”后,系统自动生成名称“轴_1”的硬件组态界面,一步一步类似于向导的组态下去吧,在“常规”选项中选择PTO(脉冲输出方式)控制:
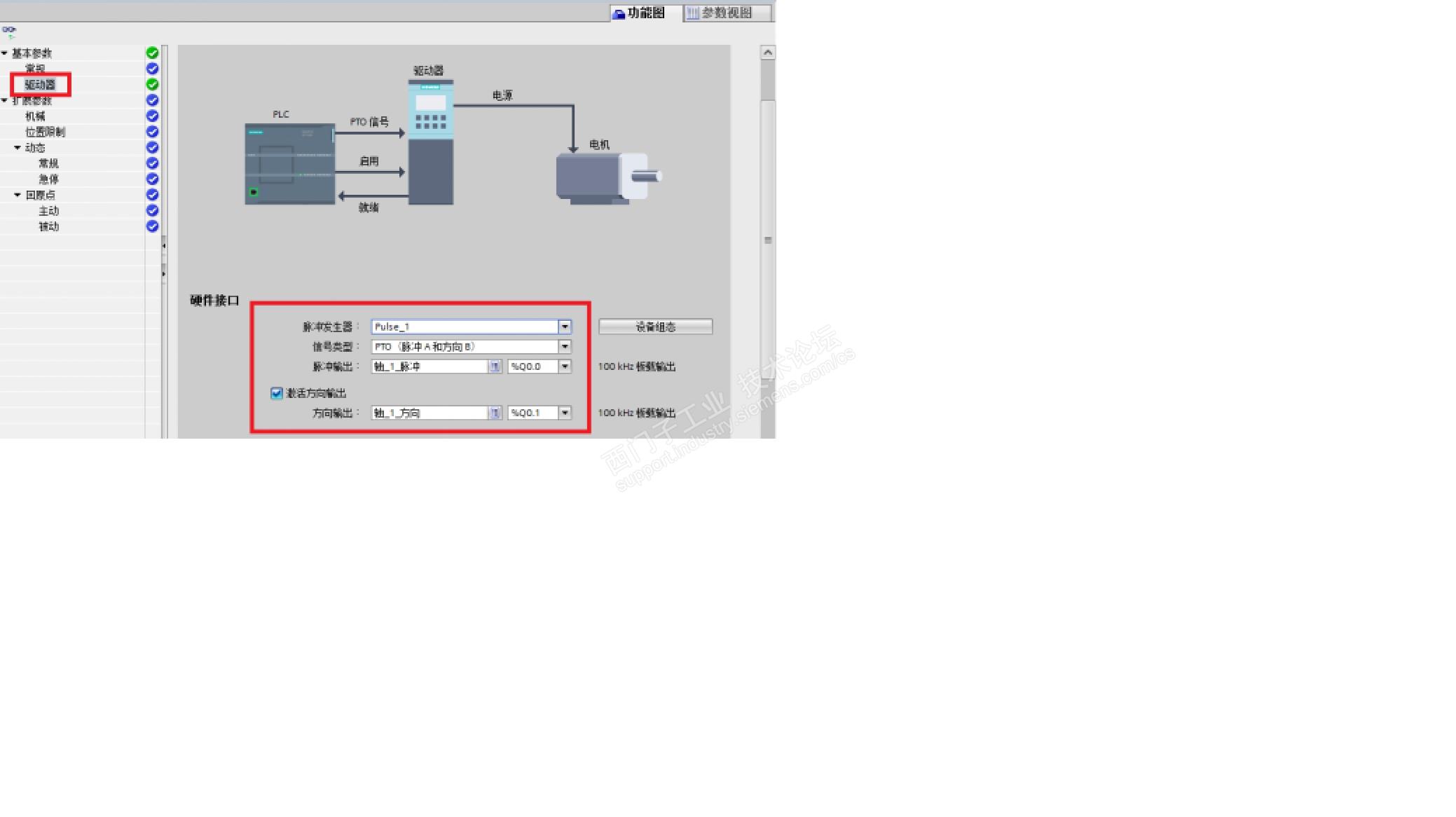
3) 在“驱动器”选项中选择脉冲发生器Pulse_1(V4.2版本支持4个轴的组态),信号类型:脉冲+方向(默认);脉冲输出(Q0.0)、方向输出(Q0.1)的地址(默认)。因为连接的是步进电机,步进驱动器没有反馈信号,这里仅仅只提供PLC给步进驱动器电源的控制信号Q0.2,提供外部继电器驱动,将步进驱动器所需的24V电源提供给步进驱动器,该窗口的其它选项不选择。
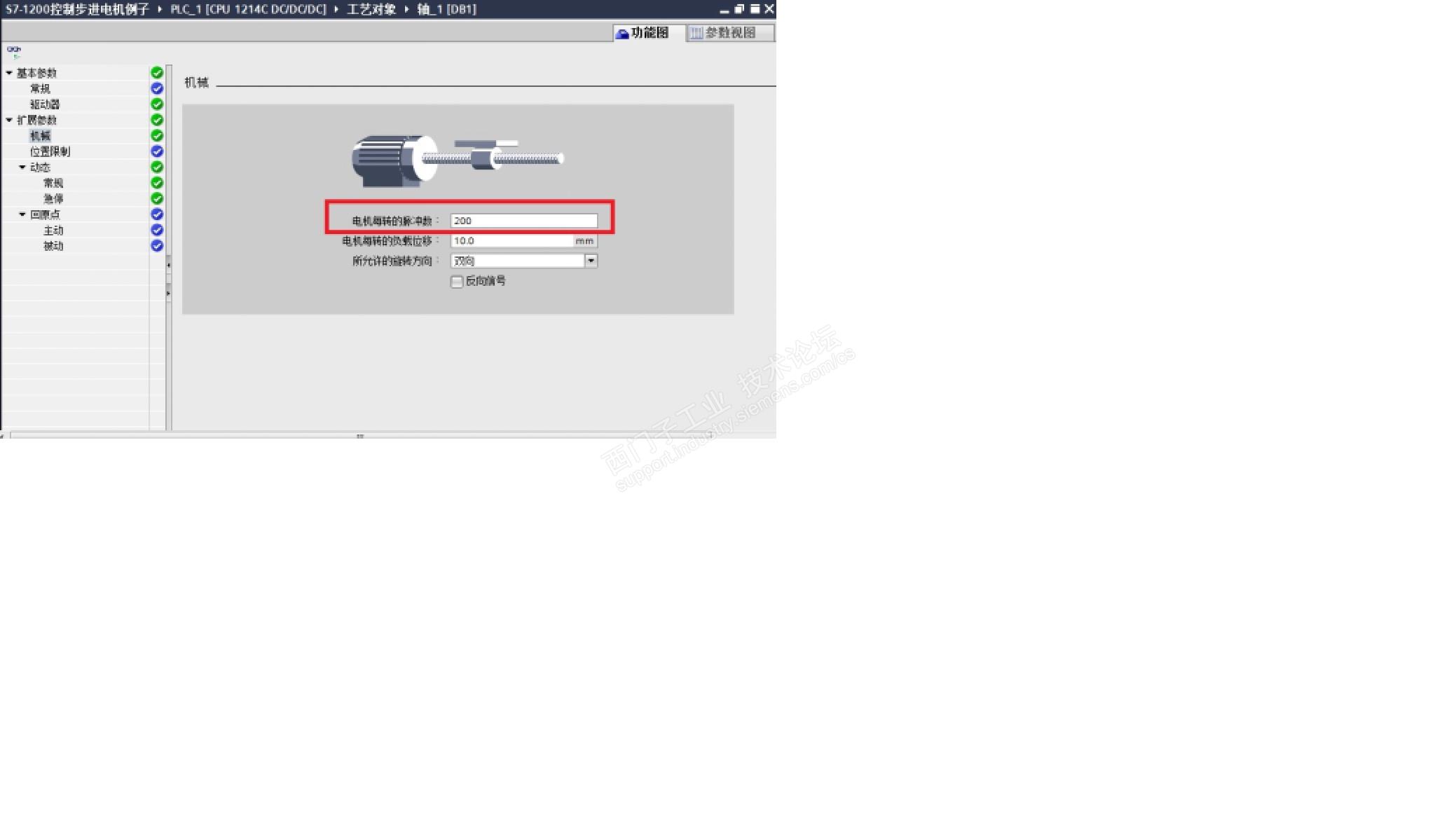
感觉,该窗口非常简洁的描述了硬件连接图示,PTO信号、启动命令给驱动器,驱动器再启动电机,驱动器反馈这些基本的步进、伺服控制方式。 4) 根据具体的步进电机特性,1.8°/脉冲,相当于步进电机旋转一周(360°)需要200个脉冲的基本信息,在“机械”窗口选择,其它因为没有导轨丝杆,不再做其它选择:
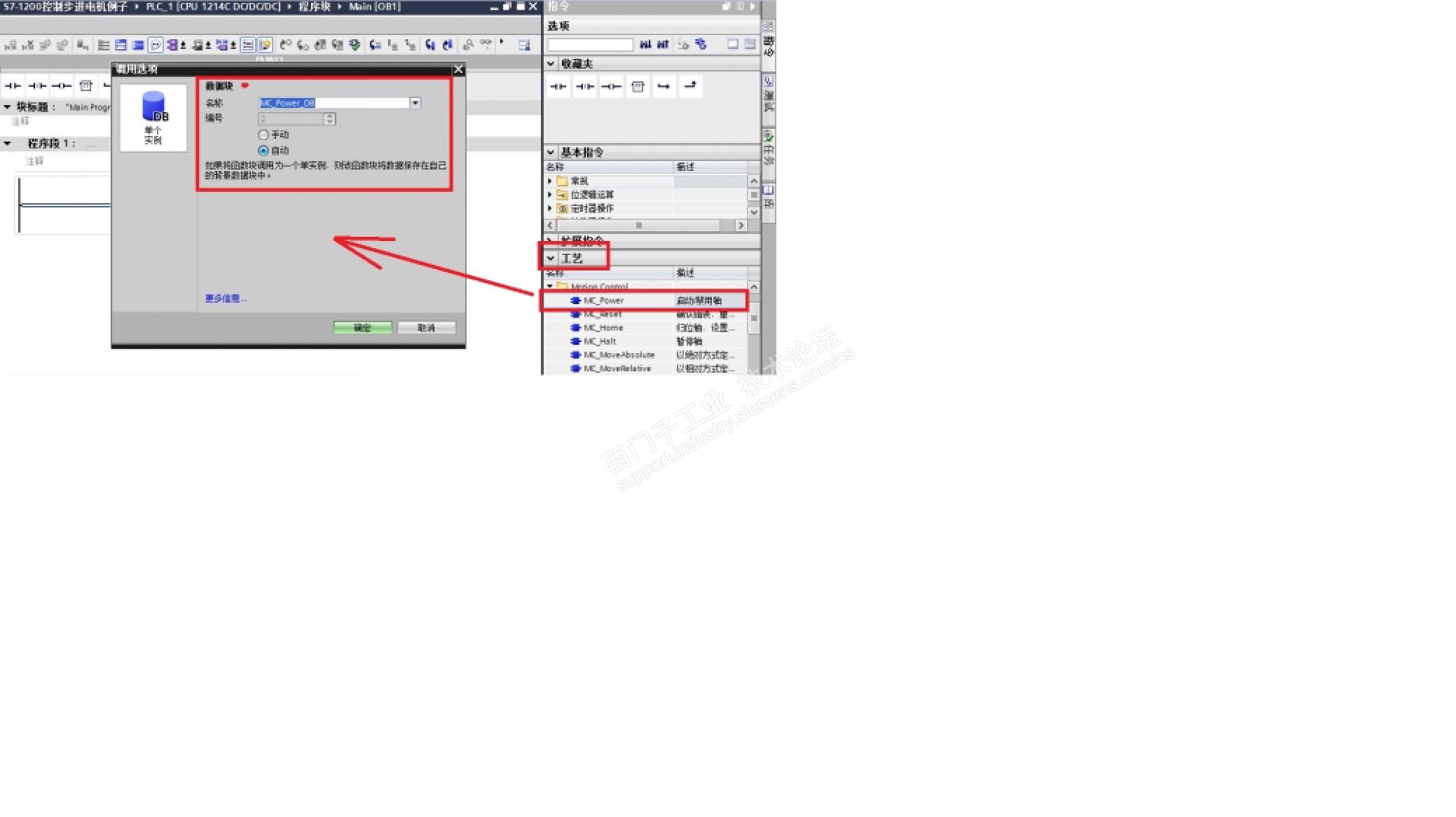
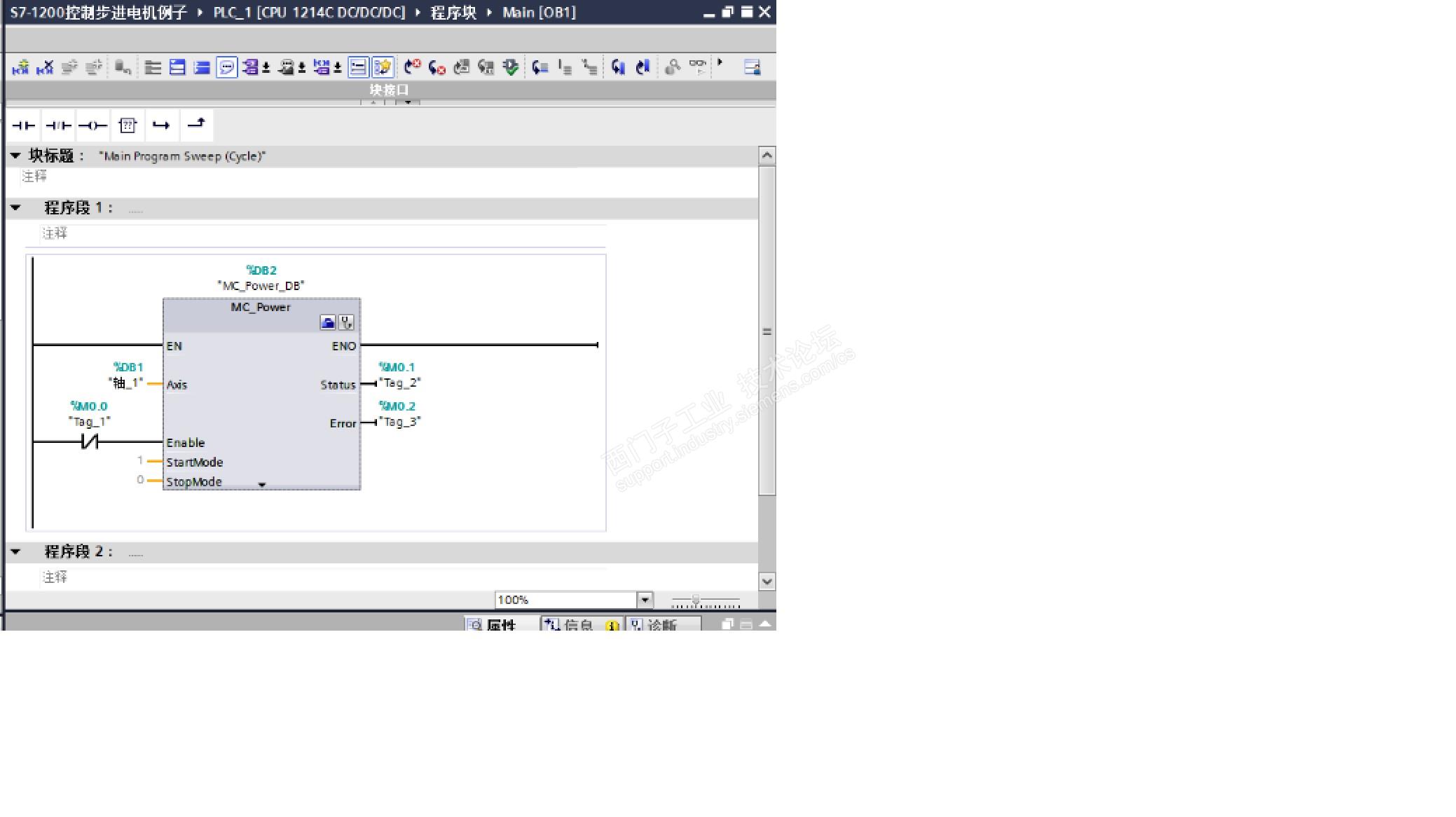
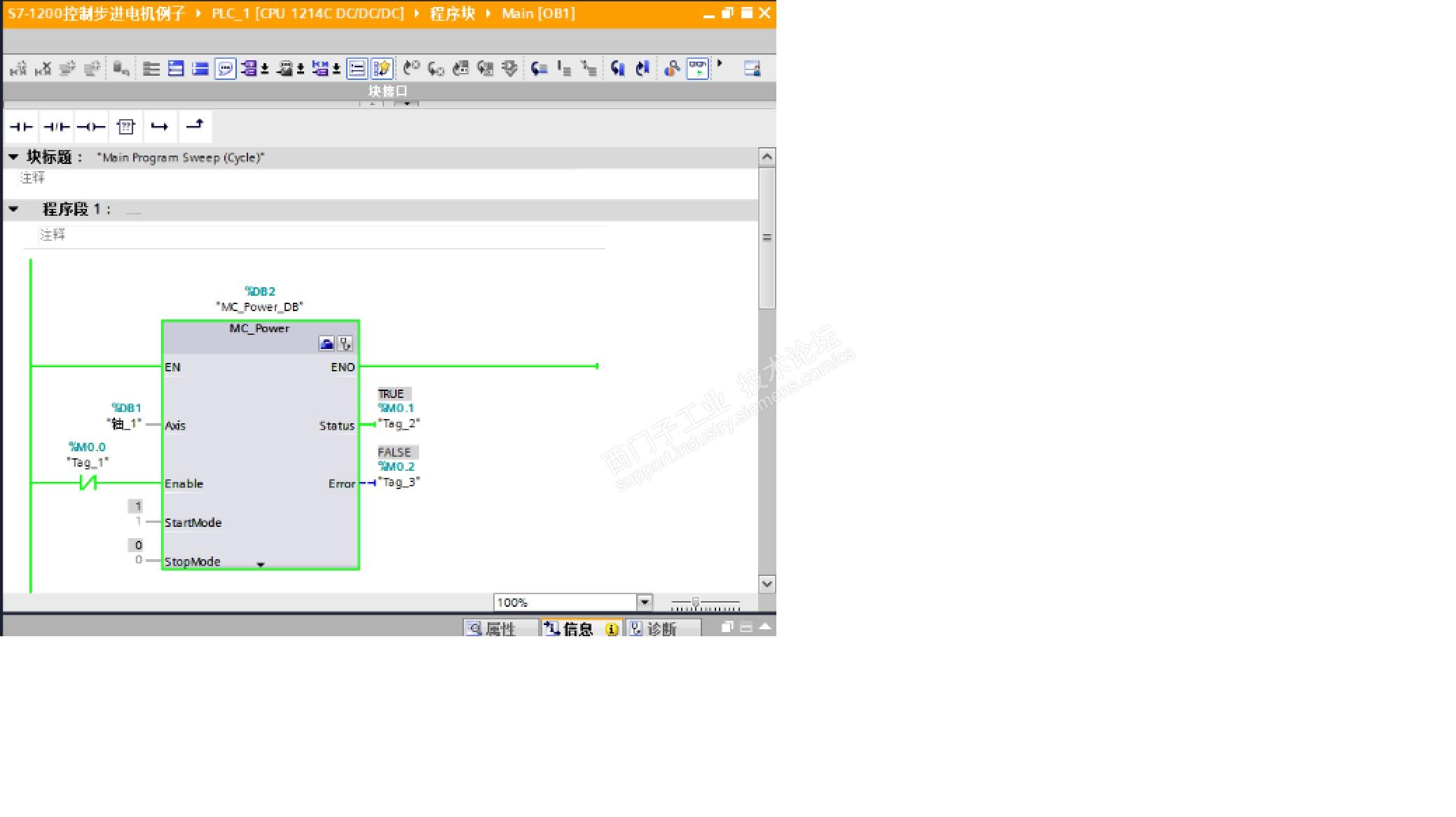
5) 因为仅仅只做一些简单的步进电机旋转测试,也没有继续忘下设置其它参数了。返回到编程界面,在OB1组织块中,把MC_POWER指令拖拽到编辑区,背景数据块(默认):
6) “确定”后,填写MC_POWER各管脚,如果对各管脚数据类型及含义不清楚的,按“F1”帮助基本能够搞定这些管脚参数了: 该指令主要是Axie、StartMode、StopMode这些管脚的赋参数。
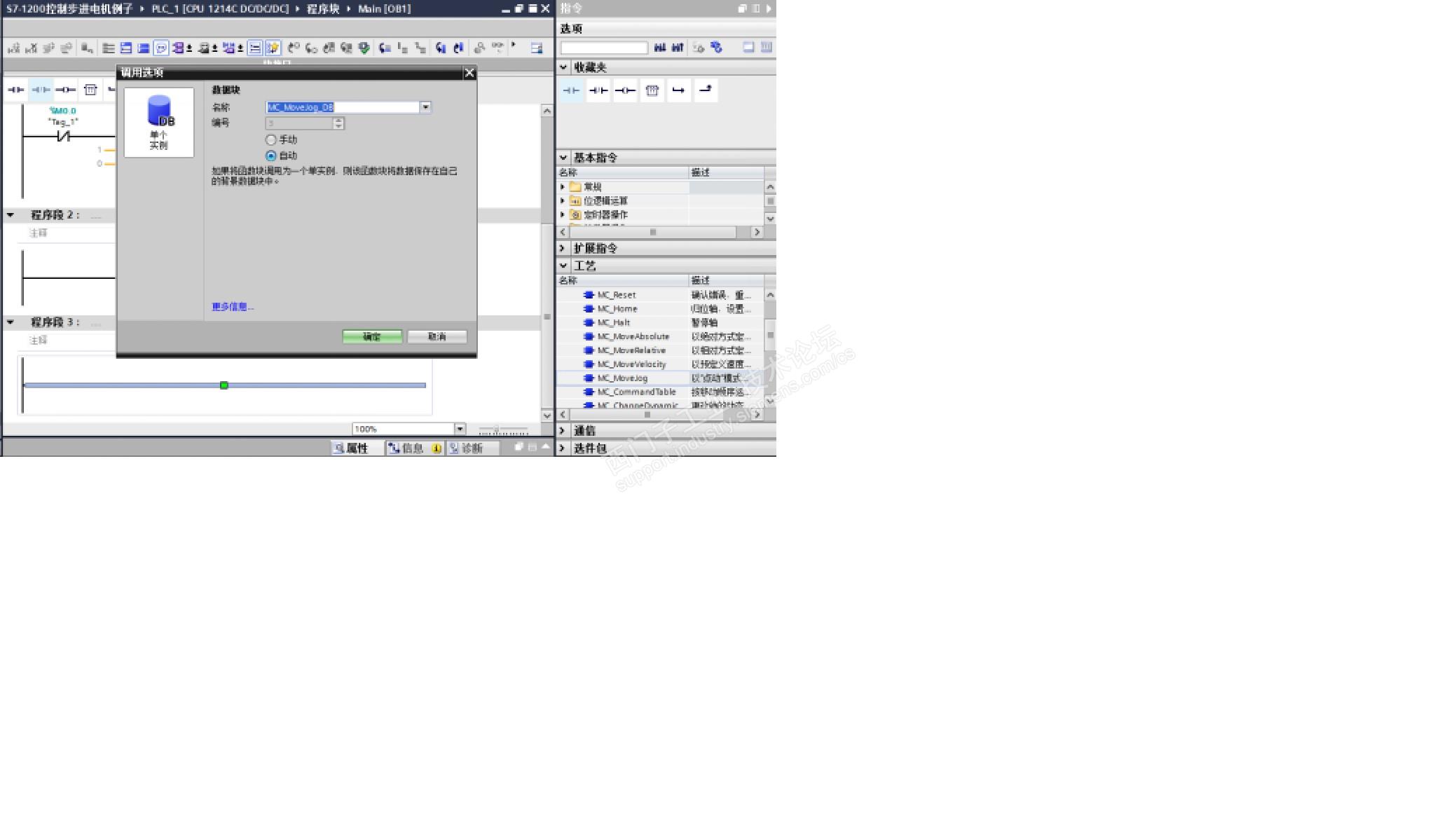
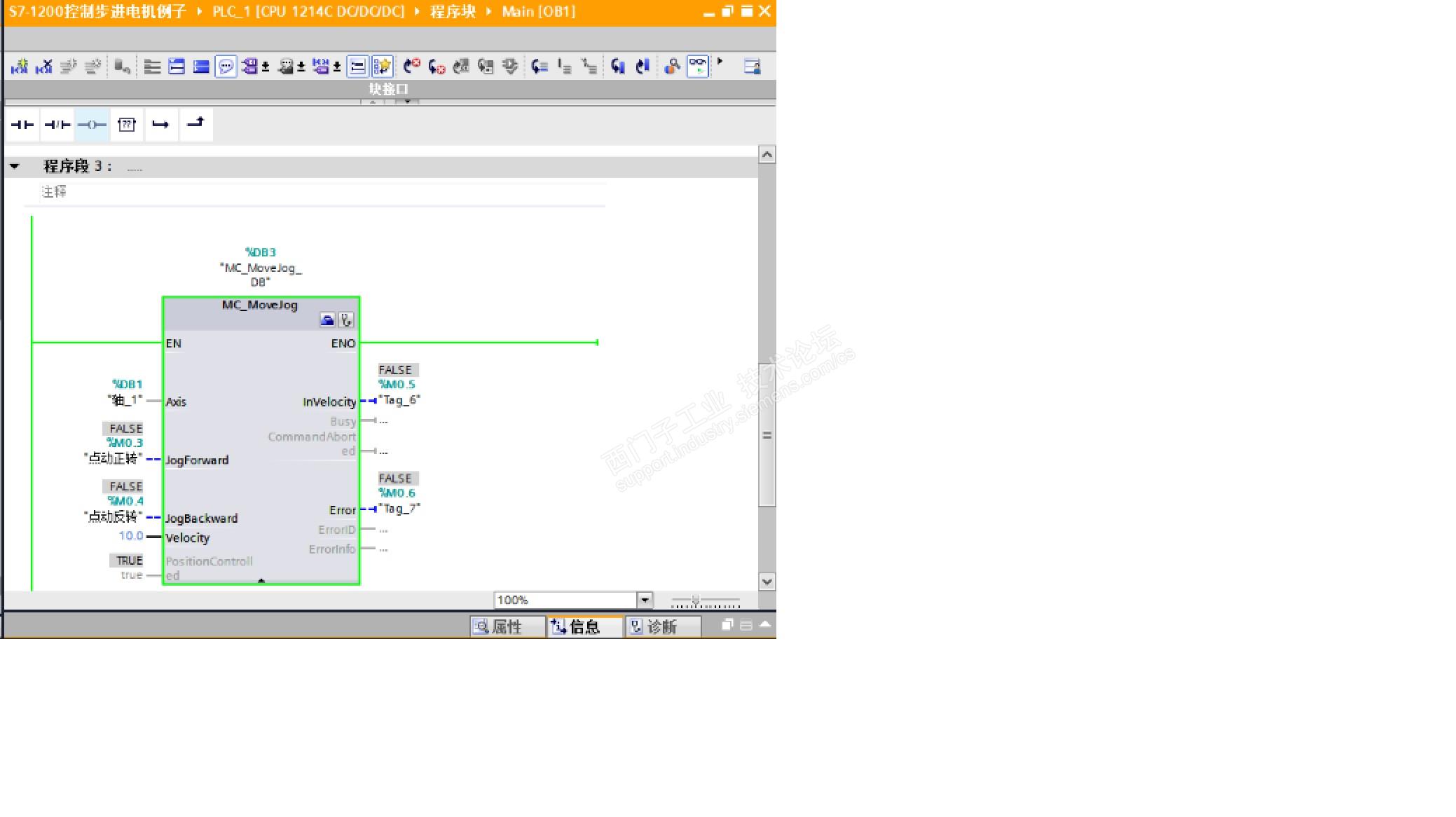
7) 因为验证实际上没有导轨和丝杆,只能是让步进电机作正、反转动,调用点动指令比较贴切一点,继续到“指令”中拖拽MC_MovJog指令到编辑区:背景数据(默认)
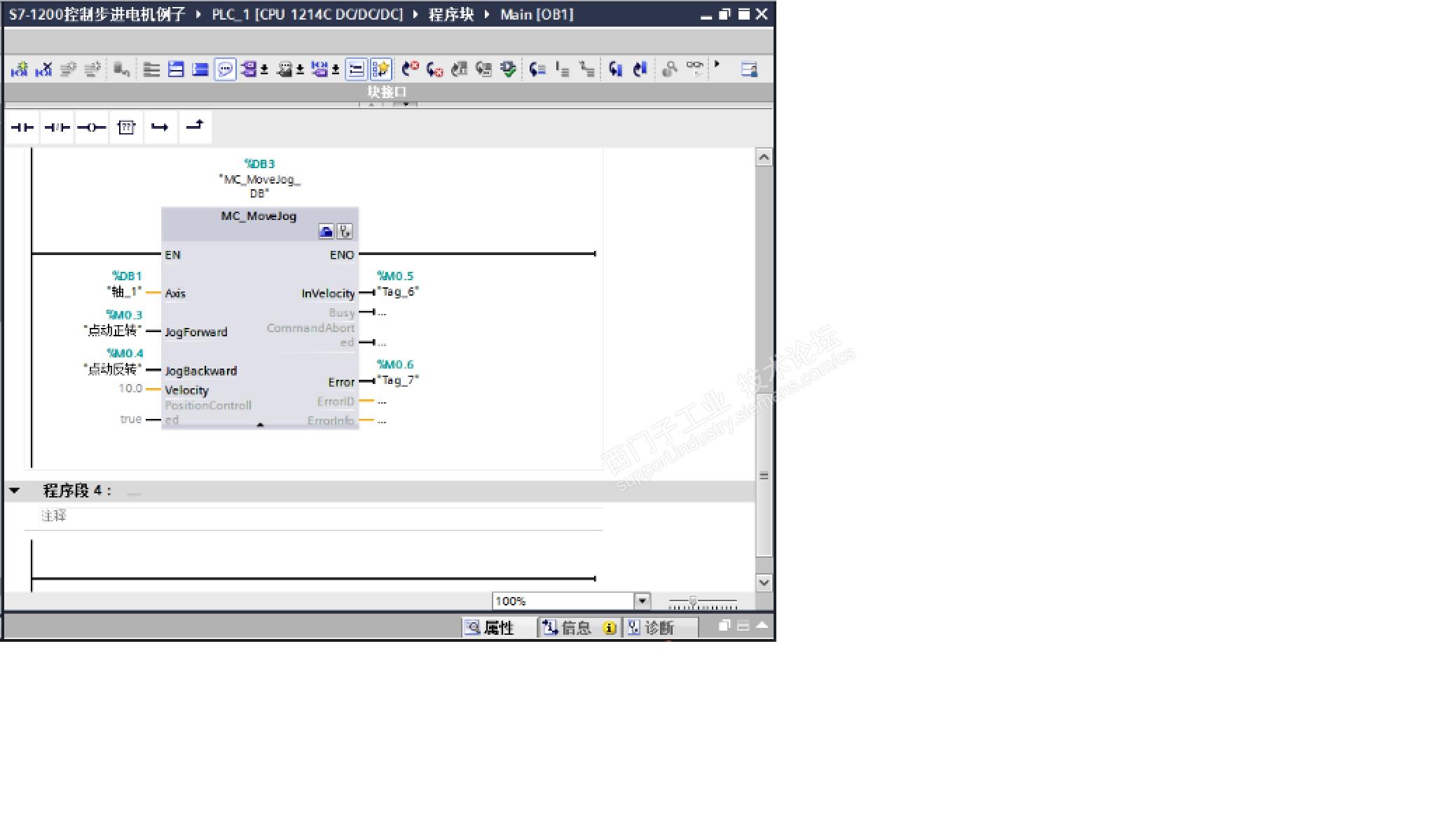
8) 测试项目,也不想连接实际硬件,就取M0.3为点动的正转,M0.4为点动的反转:
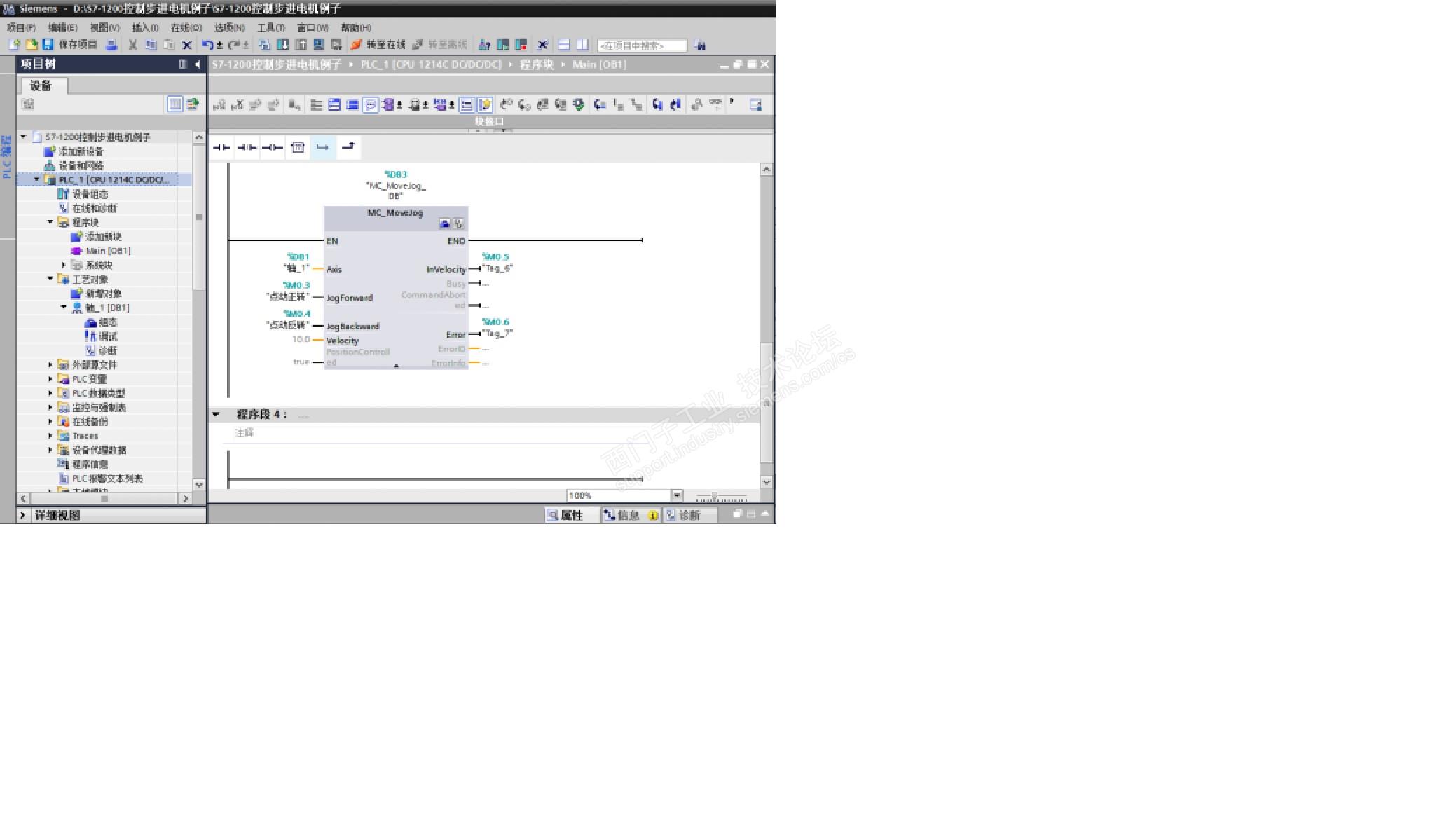
9) 好,简单的编程就这样了,可以测试一下程序及外部连接是否正确了,下载硬件及程序:
10) 步进驱动器使能正常,图示:
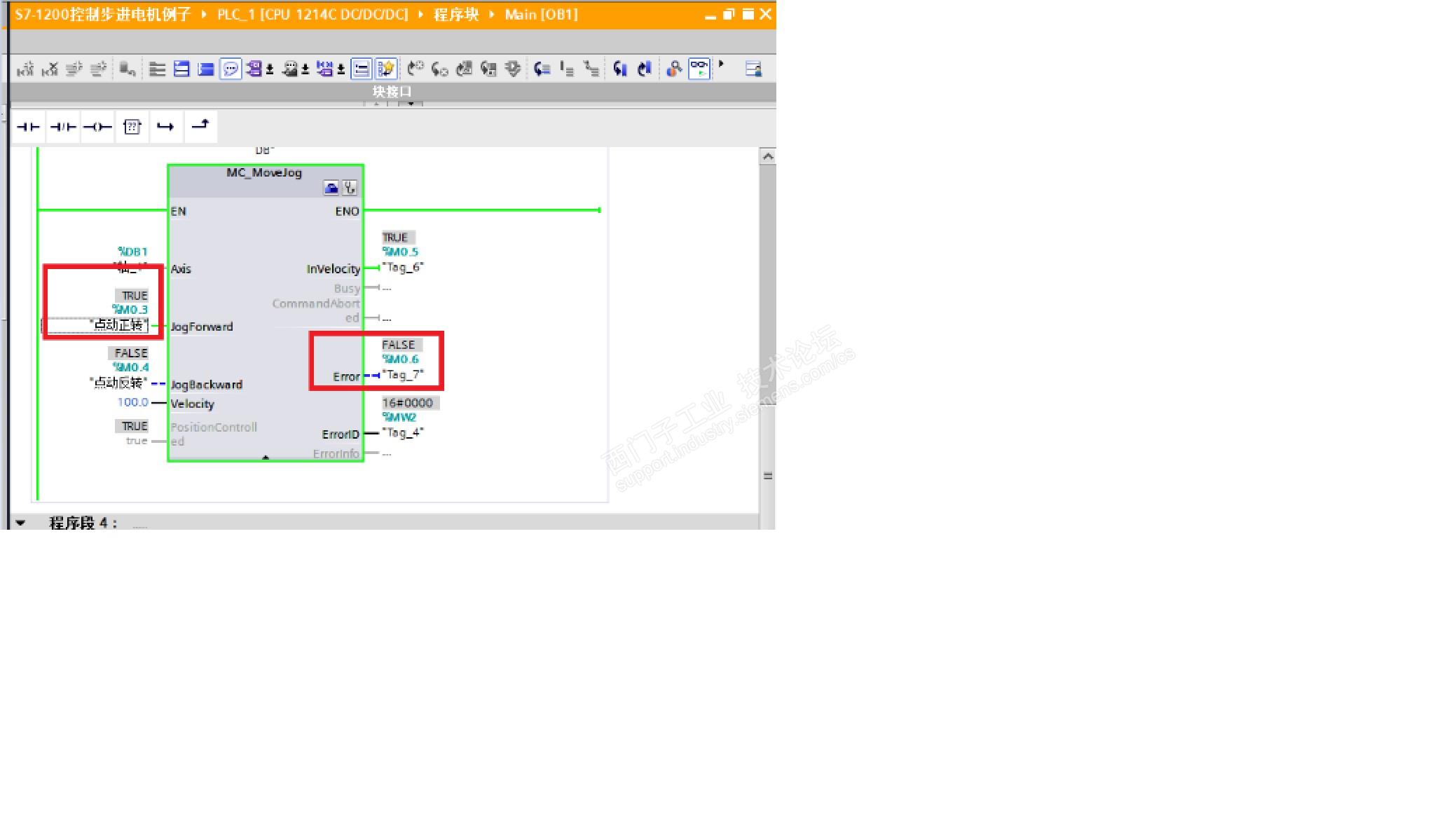
11) Veloctiy管脚(默认为10.0)点动速度不变,给M0.3/M0.4分别使能,看输出情况:
Error = true,说明指令存在错误,给ErrorID管脚写一个变量地址MW2,看结果是什么数据。重新修改程序下载后,点动,ErrorID = 16#8402,F1帮助说是Veloctiy管脚值无效,说明我硬件组态与MC_MoveJog指令没有匹配好,既然该管脚有错误,我改一个数据试试,改为100.0后下载,测试MC_MoveJog指令,没有错误报警了:
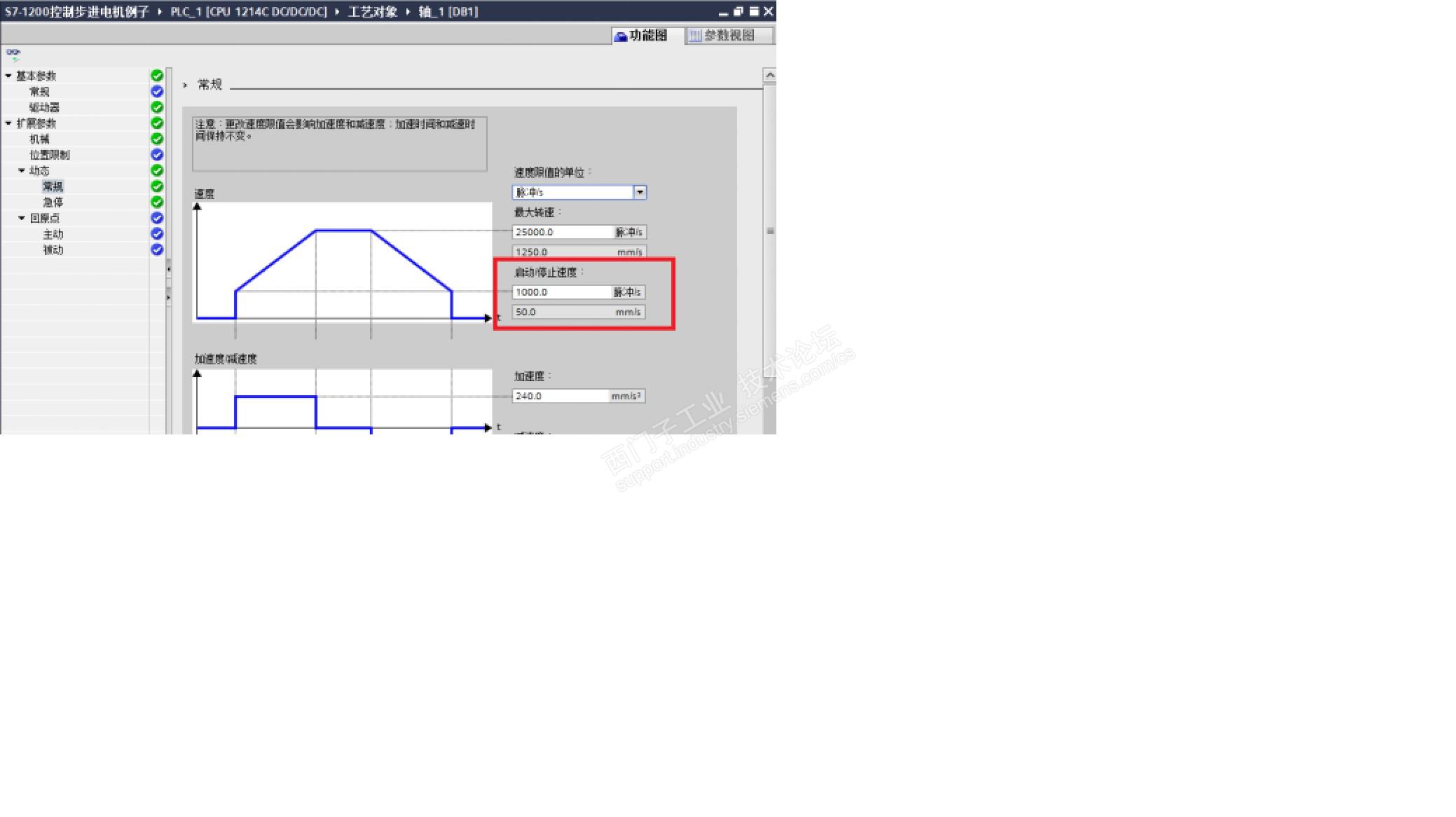
为确认Veloctiy管脚范围值,我重新返回到硬件组态的“动态常规”窗口,看到在这里有这个数据的限制,图示:
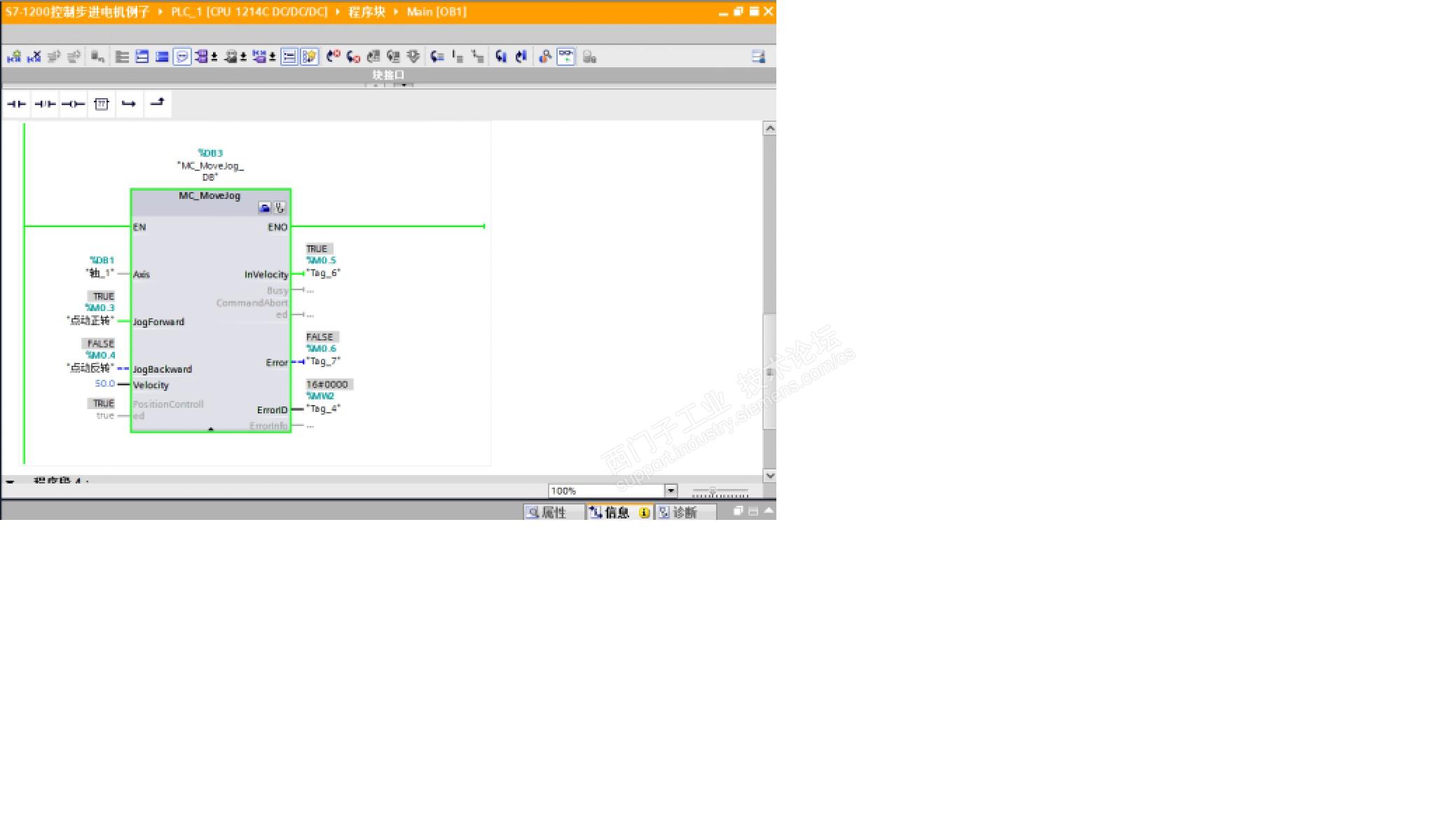
原因找到,Veloctiy管脚范围值填入数据必须大于50.0,重新修改Veloctiy管脚为50.0,下载,使能JogForward(正转)M0.3 = 1,没有出现报警Error的M0.6 = 0,图示:
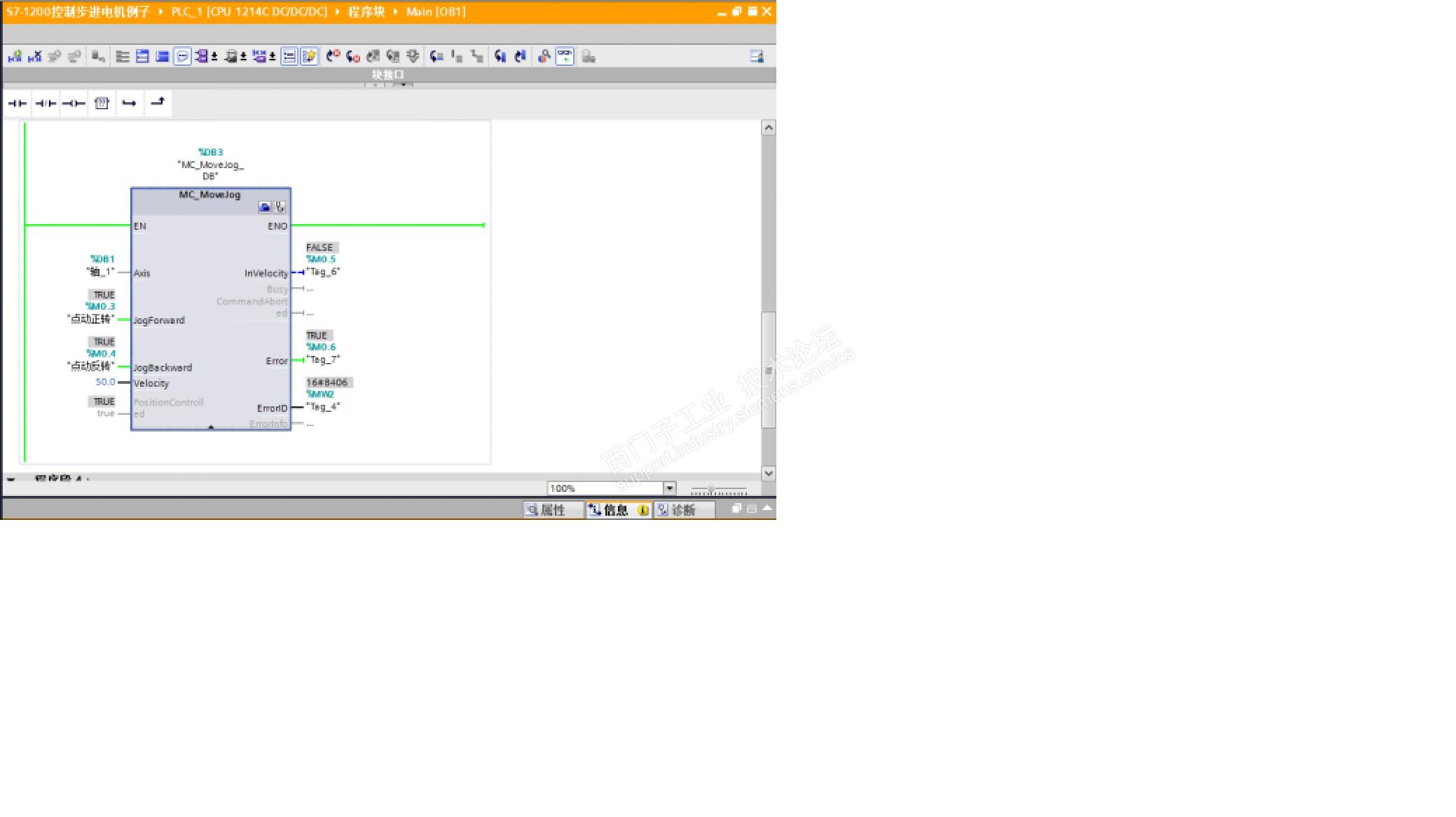
反正是测试,我索性同时使能M0.3和M0.4,看MC_MoveJog指令会出现什么结果,是具有谁优先?,下载,图示:
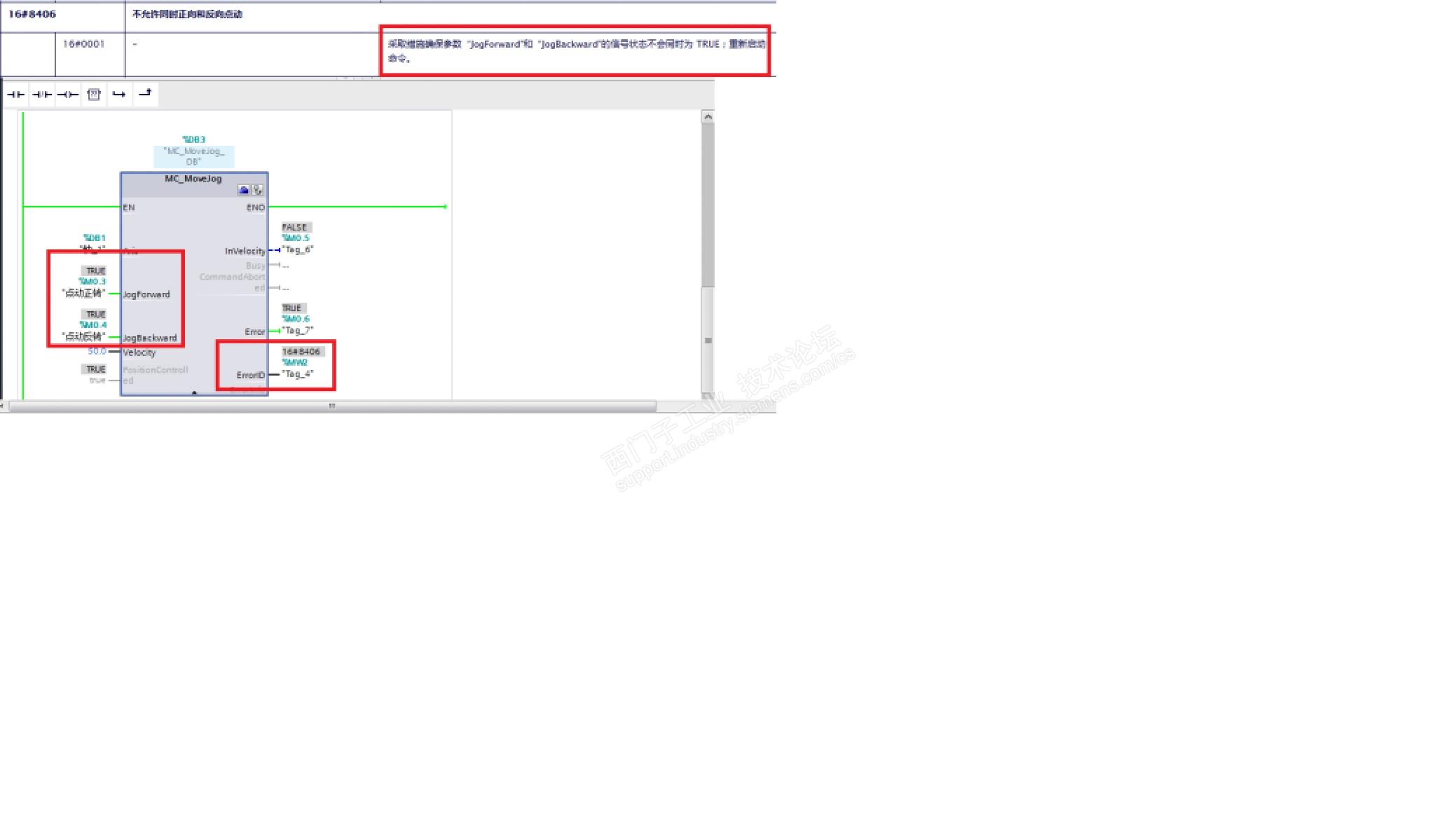
ErrorID管脚出现16#8406错误,F1帮助看说明,图示:
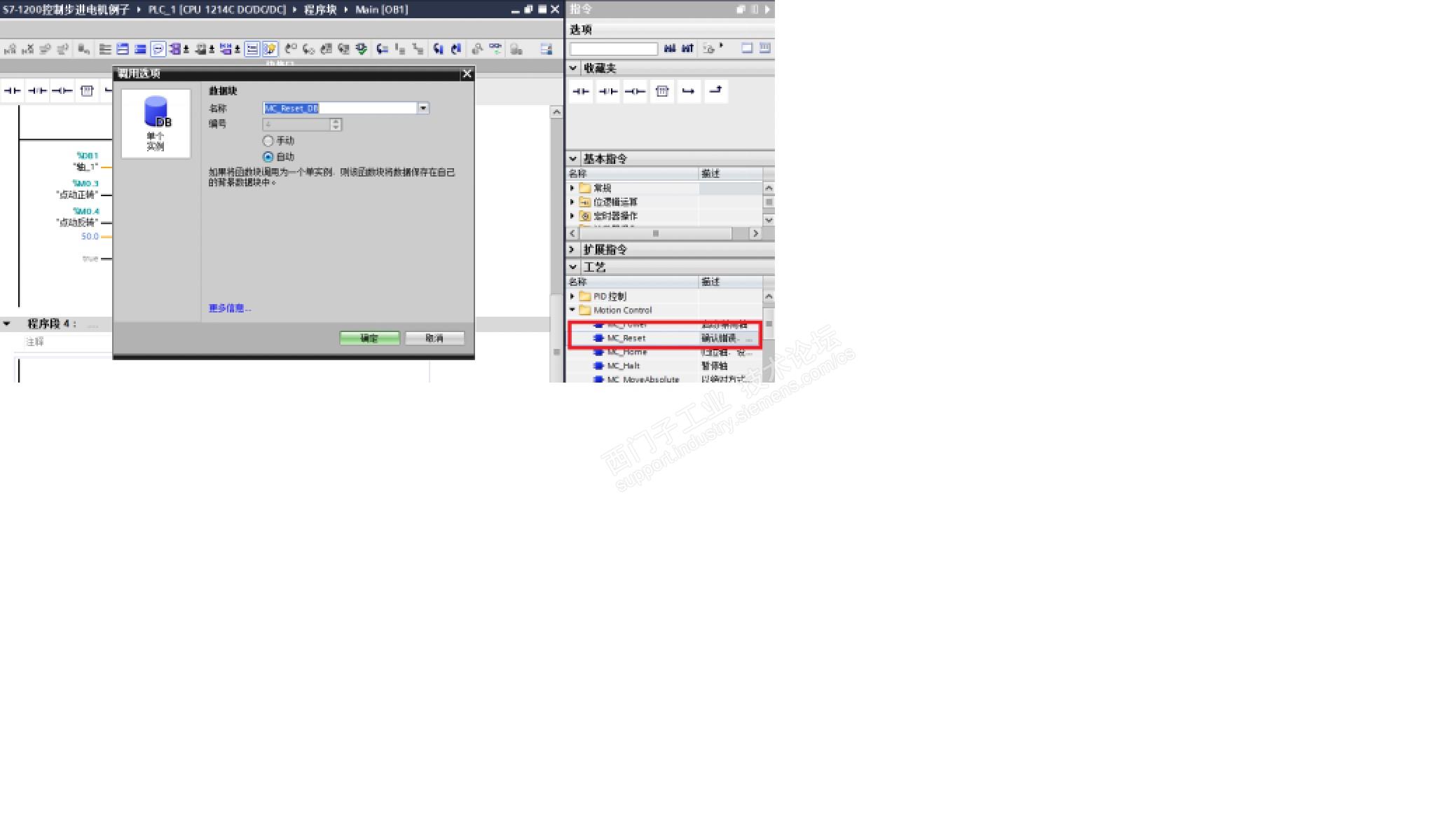
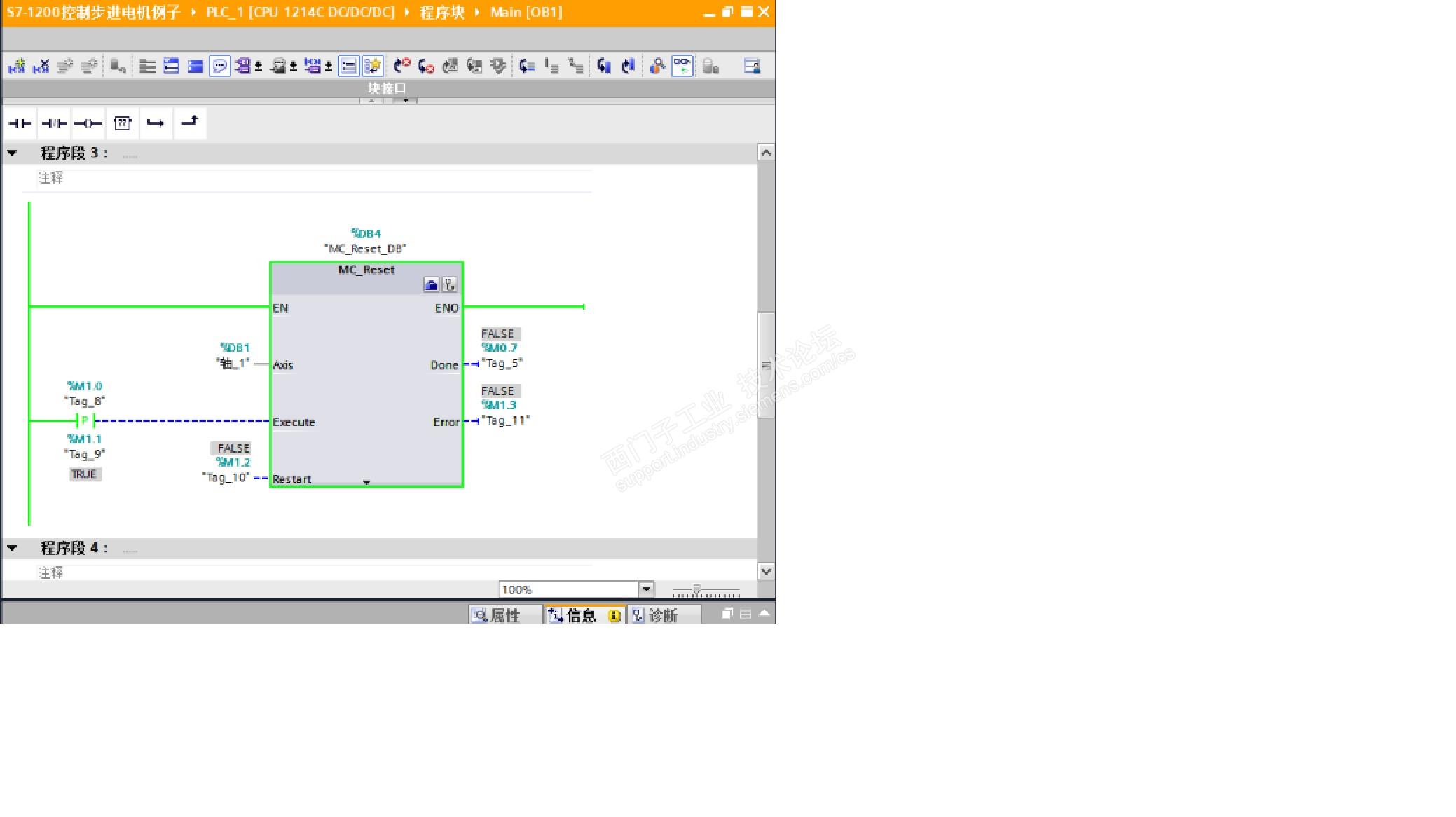
看来这些基本的逻辑关联,指令早已经做完整了。 我在恢复对M0.3/M0.4的操作中又遇到了一个新问题,即我单独复位M0.3或者M0.4时,报警并没有消除,需要将点动正、反转全部复位,既然这样,那我还需要再调用一个指令来试试指令错误时的复位,MC_Reset指令,图示: 编辑MC_Reset指令,下载,尝试了几次复位,无法复位MC_MoveJog指令ErrorID的错误号,图示:
看来复位MC指令错误,并不全是调用MC_Reset指令能够解决问题的。 简单验证测试也只能到此了,待找到导轨丝杆,做一个接近于实际应用项目再测试其它指令。有一点体会的是采用portal软件编辑简易的驱动控制,这个F1帮助是非常有效的,我第一次做这个测试验证项目,基本没有遇到什么瓶颈问题,一旦有错误信息,看F1的帮助很快能够找到问题的所在。 |










 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城














 短信登录
短信登录
