1.1 概述
在控制理论的专业学习中,很少把重点放在工业现场的基础性常见问题上, 过于专注先进控制理论的数学推导和研究, 而忽略了现场常用的传统控制方法和基本调试步骤。而现场调试的工程师常常抛弃对理论的理解和掌握,放弃系统的分析,完全依赖于自己的经验采用试凑的方法进行调试。
本文将理论知识和实际的应用场景相结合,为大家例举调试中的常见问题,帮助伺服工程师观察和理解现场的实际现象,快速优化伺服控制器。
1.2 比例是大还是小?
问题一
使用一个电机A,不带负载时,如果设置比例增益参数为0.3。通过带有一定的弹性机构连接负载到该电机上,负载和电机的总惯量比空电机大,那么比例参数0.3会会显得太大了,还是太小了呢?
相关信息
由电机驱动的机械系统可以通过所谓的双质点系统进行简化描述。
这两个载荷之间的连接,即耦合,由刚度(c)和阻尼(d)来进行描述。

图 1-1 双质点系统
在频域中,系统具有以下频率响应:
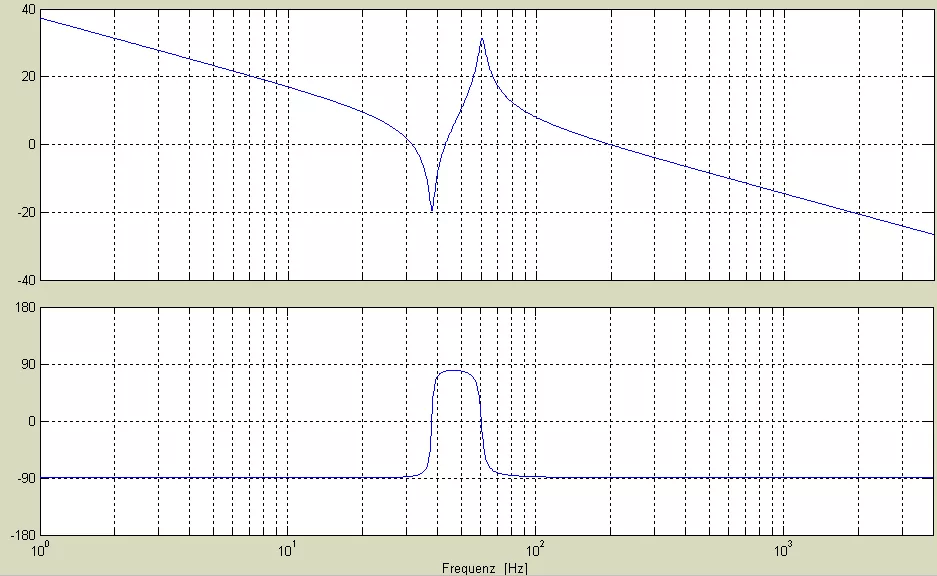
图 2-2速度控制系统频率响应
两个不同的频率,可以观测到耦合到电机的负载。
过了零点频率,相关负载与电机/系统解耦。这意味着,控制系统不可能在高于零点频率驱动负载,从电机到负载的能量传输断开。较低的线与较高的线相比,较低的级意味着的转动惯量更大。
对于理想的双质点系统,系统的总惯量可以通过锁定转子频率(零点)的左侧读取到。在共振频率右侧,由于负载惯量已经解耦 – 对于控制系统来说只有电机惯量可见。
零点表明在这个频率上存在比当前负载高的多的惯量。负载的运动非常消耗能量 - 它消除了电机的运动。
相反,极点表明似乎系统中存在非常小的惯量。在这种情况下,电机不必为了移动负载使用那么多的能量 – 负载“推动”电机。
简答
通常会认为速度环的比例系统是正比于惯量大小的,但是由于弹性和双质点系统的存在,系统会在特定频率变得不稳定。
由于耦合的弹性,出现谐振频率时,电机面对的惯量比电机本身惯量小得多。此时负载“推动”电机,因此则对应的Kp太大了。
带上负载后机械方面可以增加电机与负载的连接刚性,控制方面可以通过电流环设定值滤波器来消除极点,或者设置合适的Kp来保证系统的稳定。
1.3 速度环比例和积分对负载的作用?
问题二
将一个负载悬挂在电机轴的侧面,如果不进行闭环控制则受重力影响负载直接掉落。此时激活速度闭环,如果仅有比例控制生效,会产生什么现象呢?如果只有积分生效,则又会产生什么现象呢?
相关信息
速度控制器是PI控制器。比例对应于与设定值有关的电机阻尼,积分器的积分时间就像一个弹簧。
速度控制器可以通过两种策略进行优化:
高控制器增益。电机跟随设定值效果非常好。电机侧扰动可以得到最佳补偿,缺点是负载的连接刚度不足时容易震荡
如果连接刚度不足,电机侧的编码器“看不到”负载侧发生的情况。
控制器故意设置为弱,以便控制器作为“弹簧”而不是电机:负载耦合振荡。
但是,电机侧的干扰(例如齿轮)可能会产生负面影响,会对负载侧产生影响,因为控制器没有完全抑制他们。
优化一般分两步完成:
优化速度控制器增益,PI控制器的积分环节必须停用。
通过设置Tn = 0或设置很长的积分时间来完成,例如1000ms。在速度控制器增益Kp已经优化后,再进行积分时间的优化。
典型的目标是将比例增益系数设置得足够高,以获得机器动态要求,但同时保持控制环的稳定性。
简答
如果只有控制器的P部分有效,负载仍会下降向下,但如同在粘性液体中,下降会产生阻尼效果,更大Kp增加更多的阻尼效果。
只有积分部分,负载仅在停止前下降到某个角度。可以想象弹簧会受到压缩,从而负载减速下降(当弹簧力=重量的扭矩时达到静止)。积分时间越短,负载越快停止。如果移除负
1.4 惯量比多少合适?
问题三
外部负载转动惯量与电机转动惯量之比多少合适?
相关信息
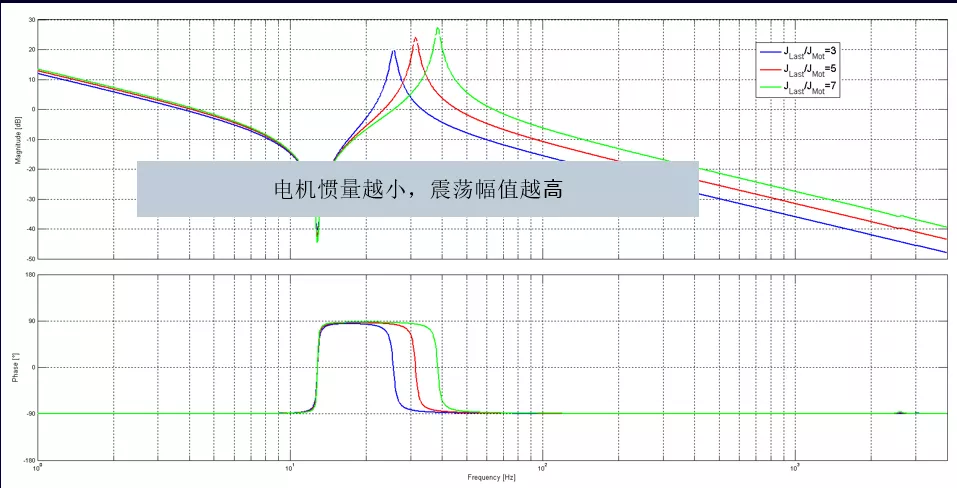
惯量比是用于评估系统动态特性的指标。
1.电机惯量越小,对于相同的负载从频域角度看,导致震荡的幅值增加:
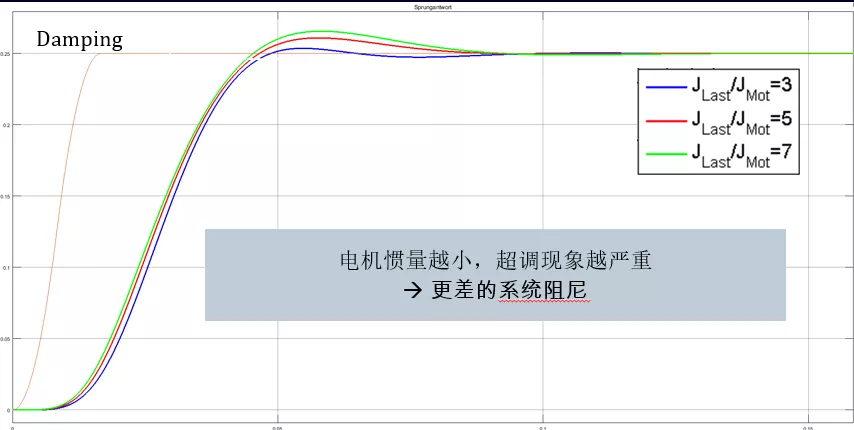
2.电机的惯量越小,对于相同的负载从时域上看,超调的现象越严重:
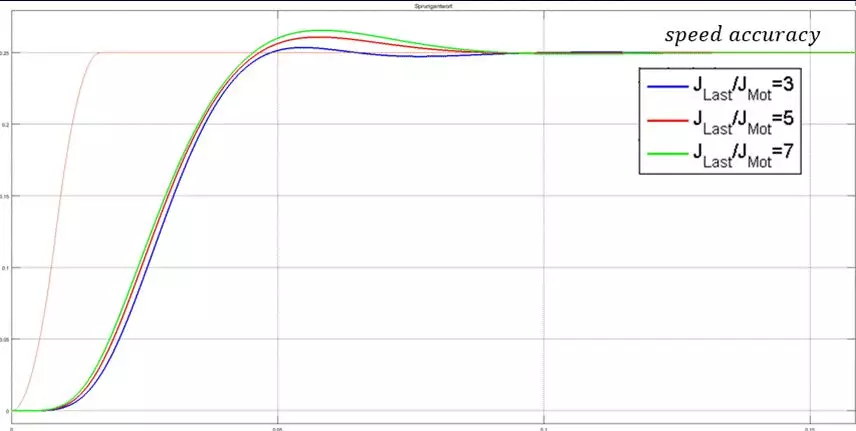
3.电机不论惯量大小,在完成动态调整过程结束后,设定值和实际值趋于一致:
简答
难以概括惯量比的通用的有效惯量比数值,因为根据电机连接刚度(转子和机器轴)和所需的负载周期(加速/减速)而不同,惯量比必须针对每个特定应用而评估。
更多详细的有关伺服驱动的话题,您可以持续关注西门子数字化工业1847学习平台,我们会及时给大家总结并分享最有价值的干货内容。
本文版权归西门子工业1847俱乐部所有,转载或者引用本文内容需注明来源及作者。









 首页
首页 智能小西-自动预约
智能小西-自动预约
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等) 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室及直播课
教室及直播课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐




















 短信登录
短信登录
