| 作者 | 主题 |
|---|---|
|
孤独天空 侠圣 
经验值:2085 发帖数:282 精华帖:2 |
楼主
主题:运动指令+第三方伺服+位移传感器的失败尝试 
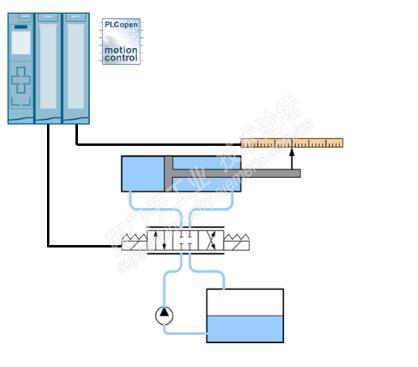
1200/1500(T)运动控制中PTO模式只能开环,模拟量闭环或者PN。 PTO闭环至今官方无解,PN也不多说了。 在搭配非西家伺服,模拟量闭环如果没有编码器,或者编码器不匹配,只有位移传感器(或其他模拟量传感器),如何闭环? 当然失败了,不想浪费时间的不用往下看。 直接用运动指令去控制比例阀+位移传感器。
方案为: 1,MC-PreServo中将模拟量IW模拟成编码器报文81。 2,MC-PostServo中针对液压阀的非线***调整设定值,其实就是对运动指令的输出做了一下分段缩放,然后通过QW输出。这个用的是现成LGF中的一个库。 就想,能否套用一下,变成1200+第三方伺服+位移传感器。因为伺服不像液压,伺服是线性的,步骤2就不需要了。正好手边有一个1212DC。 1,工艺轴,模拟量输出
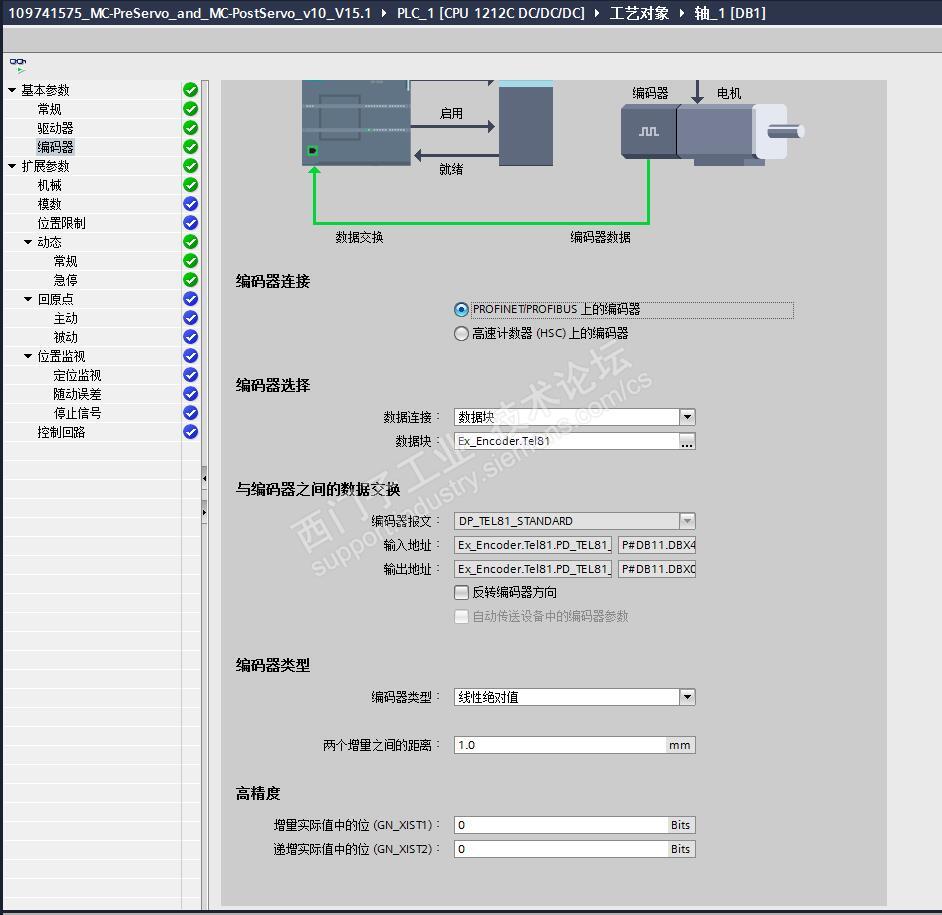
2,编码器用数据块模拟出来
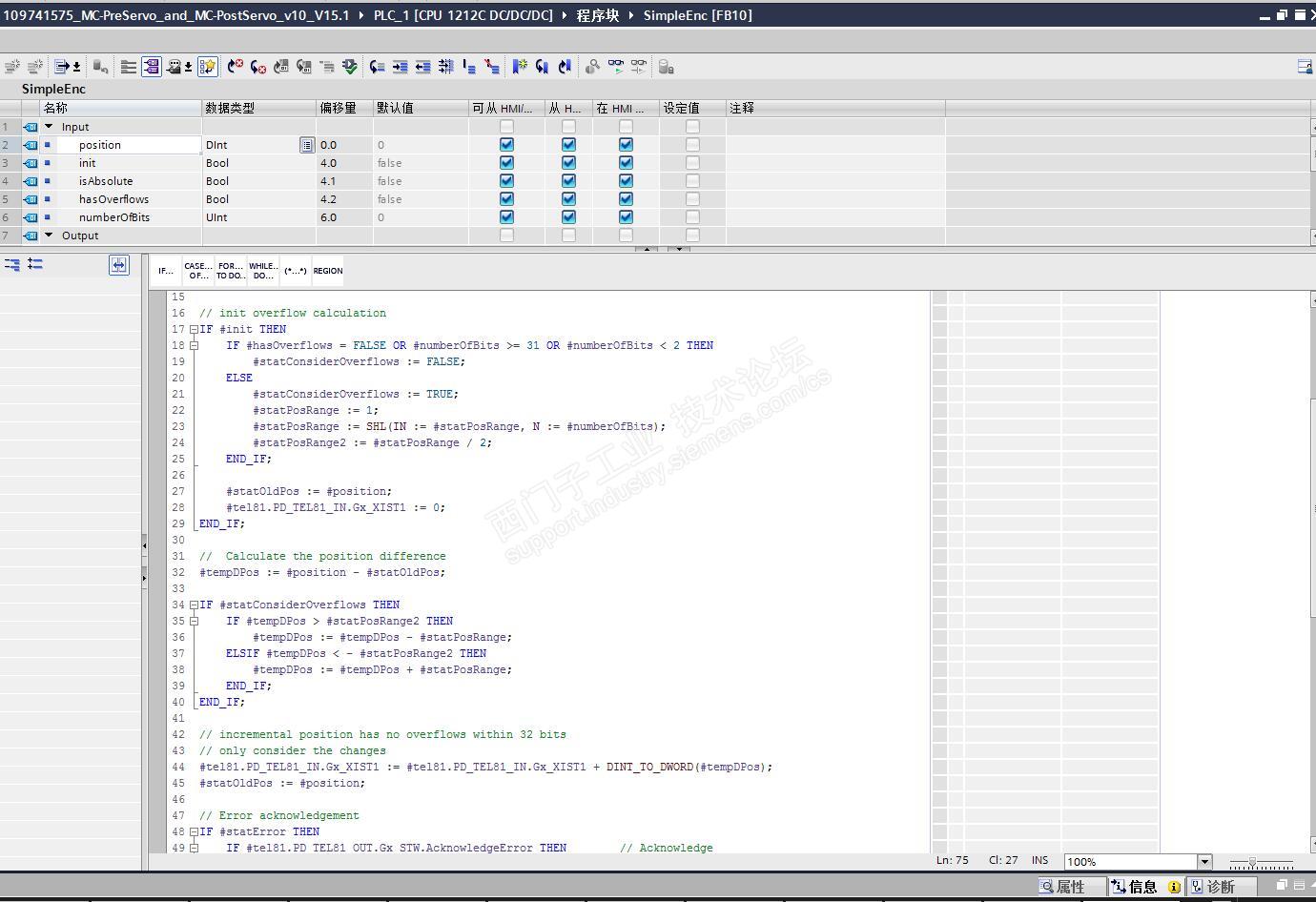
3,MC-PreServo中复制官方实例IW的处理程序。
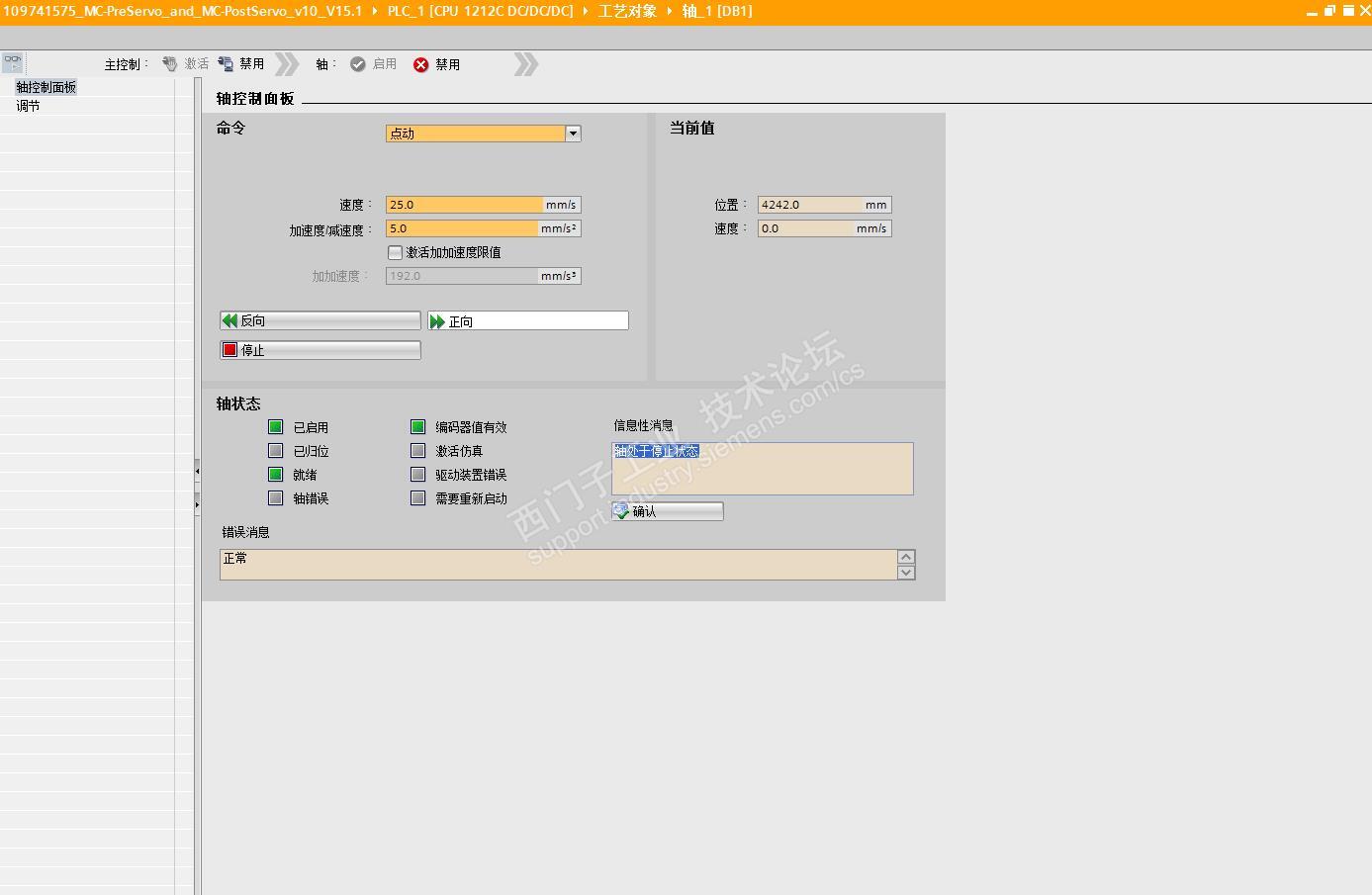
4,手边没有伺服和位移传感器先,下载到PLC试一下。
随便弄了一个电压接进PLC,可以看到模拟出编码器的位置了。 存在问题: 1,原实例中用的是HS型模拟模块,这些模块1200中是没有的。模拟量采集时静态时也有波动,导致编码器位置一直在跳。 2,因为没有实际的执行和反馈原件,导致一给定速度就报错了(误差过大)。 最终还是失败的。 这种方式不如直接PID更加暴力简单吗?那么官方实例用运动指令的意义何在? 期待大神。 |
|
Zane 版主 经验值:85179 发帖数:21055 精华帖:399 |
3楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试工艺轴采用了前馈加PID的线性插补技术,这样的好处是响应快,超调小
Zane
注册自动化系统工程师
Always save before download
|
|
孤独天空 侠圣 经验值:2085 发帖数:282 精华帖:2 |
4楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试组态成功了,就需要把第三方编码器(位移传感器)的数据包装成西门子标准编码器报文81,实例中是直接用的模拟量伪装成报文81,而且看似很长,其实很简单,大部分都是些判断,溢出,错误处理等。 PLC处理顺序为MC-PreServo>MC-Servo>MC-PostServo。 MC-PreServo可编辑,这里面添加编码器包装程序。 MC-Servo不可编辑。 MC-PostServo,可编辑,对运动轴输出做二次处理,根据需要是否添加。 剩下来就一样了,该调用什么命令,绝对定位,相对定位什么的。 关键在于MC-PreServo中如何将第三方数据包装成西门子标准编码器报文81。 我是直接复制实例中的,对报文81的格式和定义并不清楚,并且采集普通模拟量传感器时,AD值一直会有三四个波动,导致即使轴未启动,这个位置也一直跳。 |
|
伊默 至圣 经验值:19263 发帖数:4259 精华帖:118 |
7楼
 主题:回复:运动指令+第三方伺服+位移传感器的失败尝试
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试
从博途V14开始就已经有这个功能了! 从那个时候开始我就玩这个了! 1500+基恩士GT2系列光栅尺(位移传感器)+ 日系的模拟量伺服(现在换成了V90走PN IRT)。 很Easy,很爽啊。 没你们说的问题啊! 而且从V14SP1有了闭环模式下的开环定位(就是特定工况下,传感器脱离负载), 爽得不要不要的啊! 我记得为这个功能,我还发过一个精华贴。 不过,如果用1200走PN,由于1200不支持IRT,所以性能很差! 只能走模拟量控制伺服。
I can do it
|
|
伊默 至圣 经验值:19263 发帖数:4259 精华帖:118 |
9楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试
这个不好处理,输入的干扰,导致信号失真。 我的想法,做好抗干拢处理(比如换用电流信号传输)才是王道。 否则,就只能降低位置环的增益,这样带来的坏处就是轴的位置特性偏软。而且,貌似1200/1500的位置环是纯比例控制, 如果干扰信号大到一定的值时,最终位置环的结果会有静态误差! 而我原来用过TRIO的运动控制器,位置环含有积分项,则不存在这问题。
I can do it
|
|
孤独天空 侠圣 经验值:2085 发帖数:282 精华帖:2 |
10楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试官方实例中 1500+HS型模拟模块。1200没有这种模块 您的意思是说,还是尽量采用脉冲式的传感器? |
|
holdkcsxyz 至圣 经验值:13739 发帖数:1560 精华帖:24 |
12楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试高速高分辨率的模拟量的控制在于板级距离(越短越好),我做的打标扫描等项目扫描头基本都是板卡+两个直流伺服走模拟量结构,但是板卡和驱动接口卡走的是六线制差分类SPI协议(差分同步时钟信号线、差分片选线、差分发送线)传数字量信号然后再用DA转24位AD结构,这样才能有效的抗干扰。 |
|
v_wind 侠圣 经验值:2552 发帖数:287 精华帖:3 |
14楼
主题:回复:运动指令+第三方伺服+位移传感器的失败尝试轴工艺非常有必要,支持PLCopen这是开放的第一步,也是为了程序方便跨平台移植,谁不开放谁死,只不过西门子捆绑了其他产品,西门子东西都是好东西,但有的货期真是让人又爱又恨! |











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城