| 作者 | 主题 |
|---|---|
|
铁面判官 侠圣 
经验值:4073 发帖数:332 精华帖:2 |
楼主
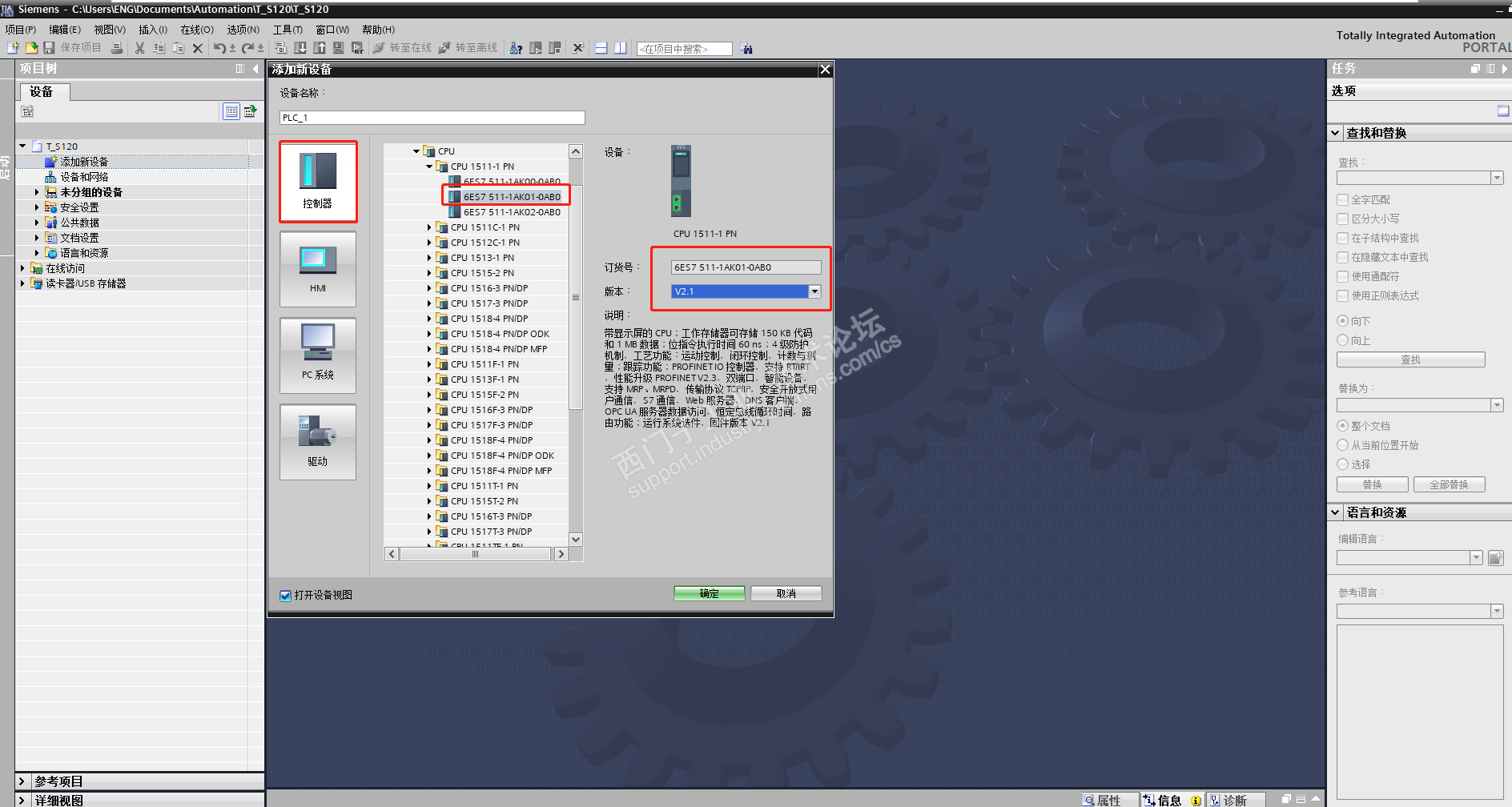
主题:【驱动】S120入门基础 一、背景: 公司新添实验设备初次尝鲜。控制单元采用的CU320-2PN;实验:S7-1500通过FB284实现基本定位功能; 二、参考文档: 1) SINAMICS S120 驱动功能手册 https://support.industry.siemens.com/cs/cn/zh/view/109781535 2) S7-1200/1500通过FB284 控制S120实现基本定位功能 https://support.industry.siemens.com/cs/cn/zh/view/109765580 三、调试软件及版本: TIA V15.1; Starter V5.4; Startdrive; 四、项目配置: S7-1500 项目配置步骤
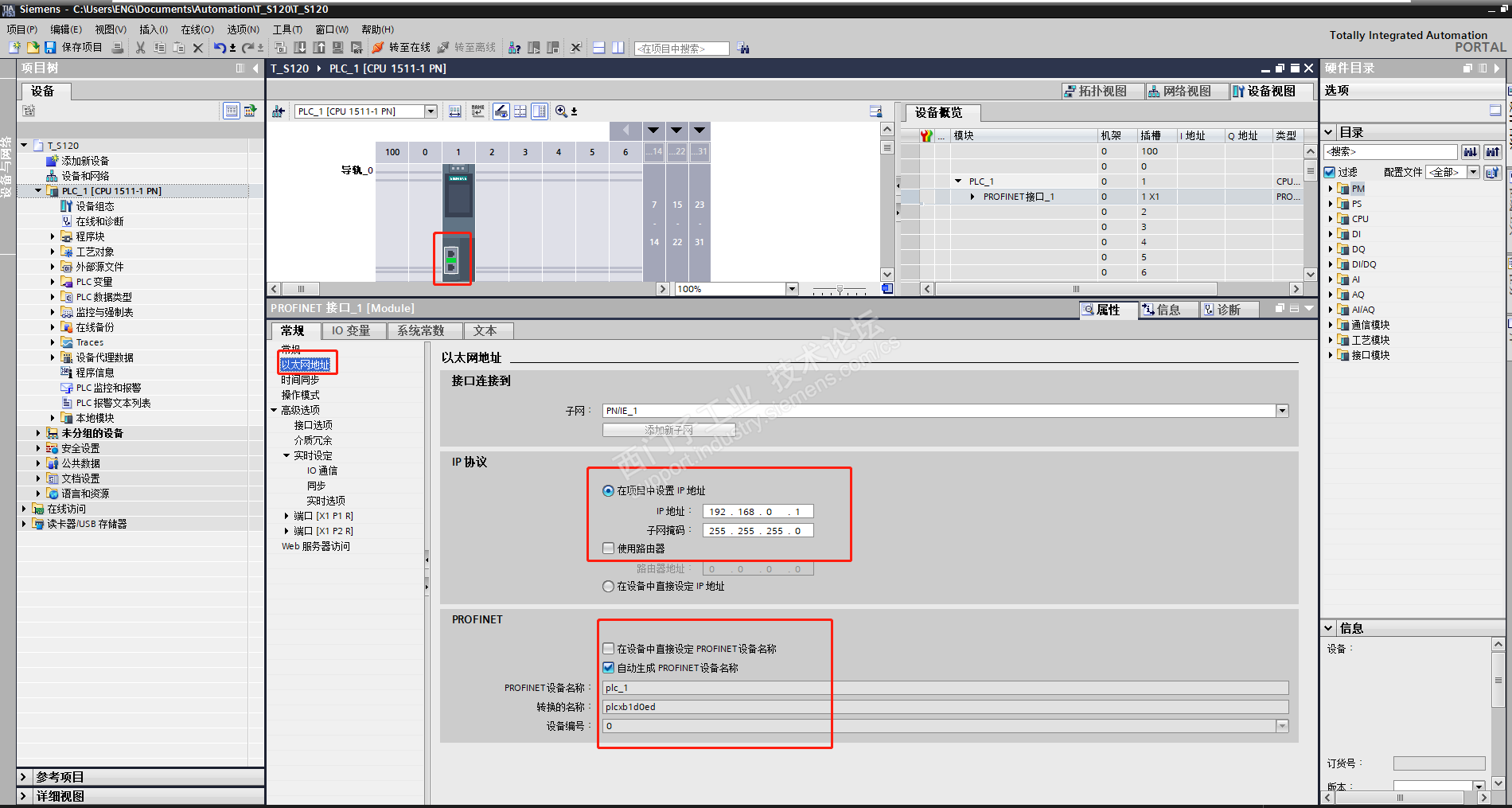
2. 设定S7-1500PLC的IP地址及设备名称
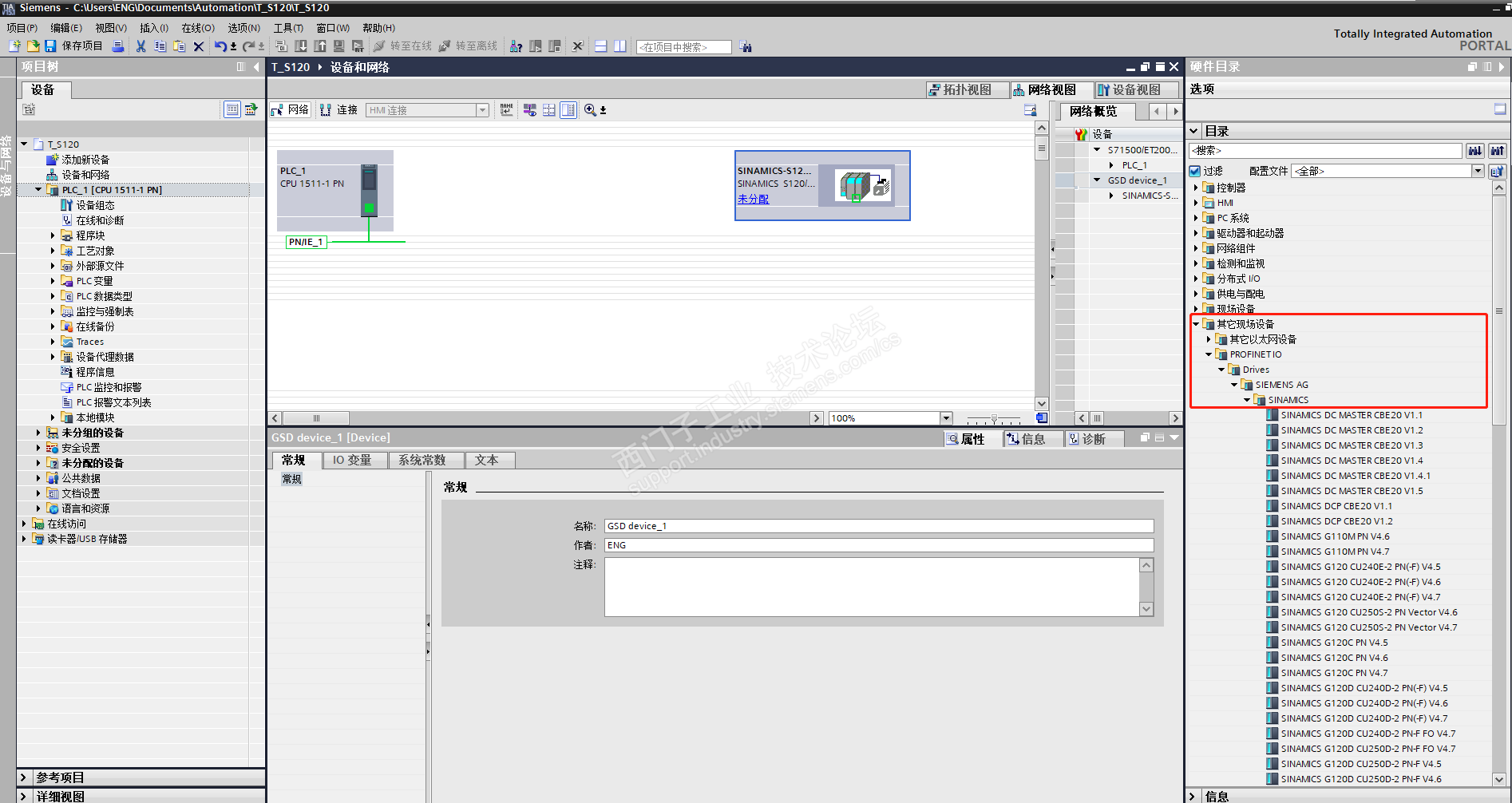
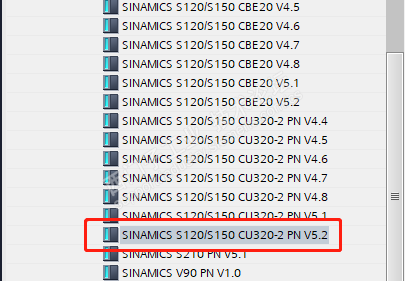
3. 在网络视图中添加S120设备
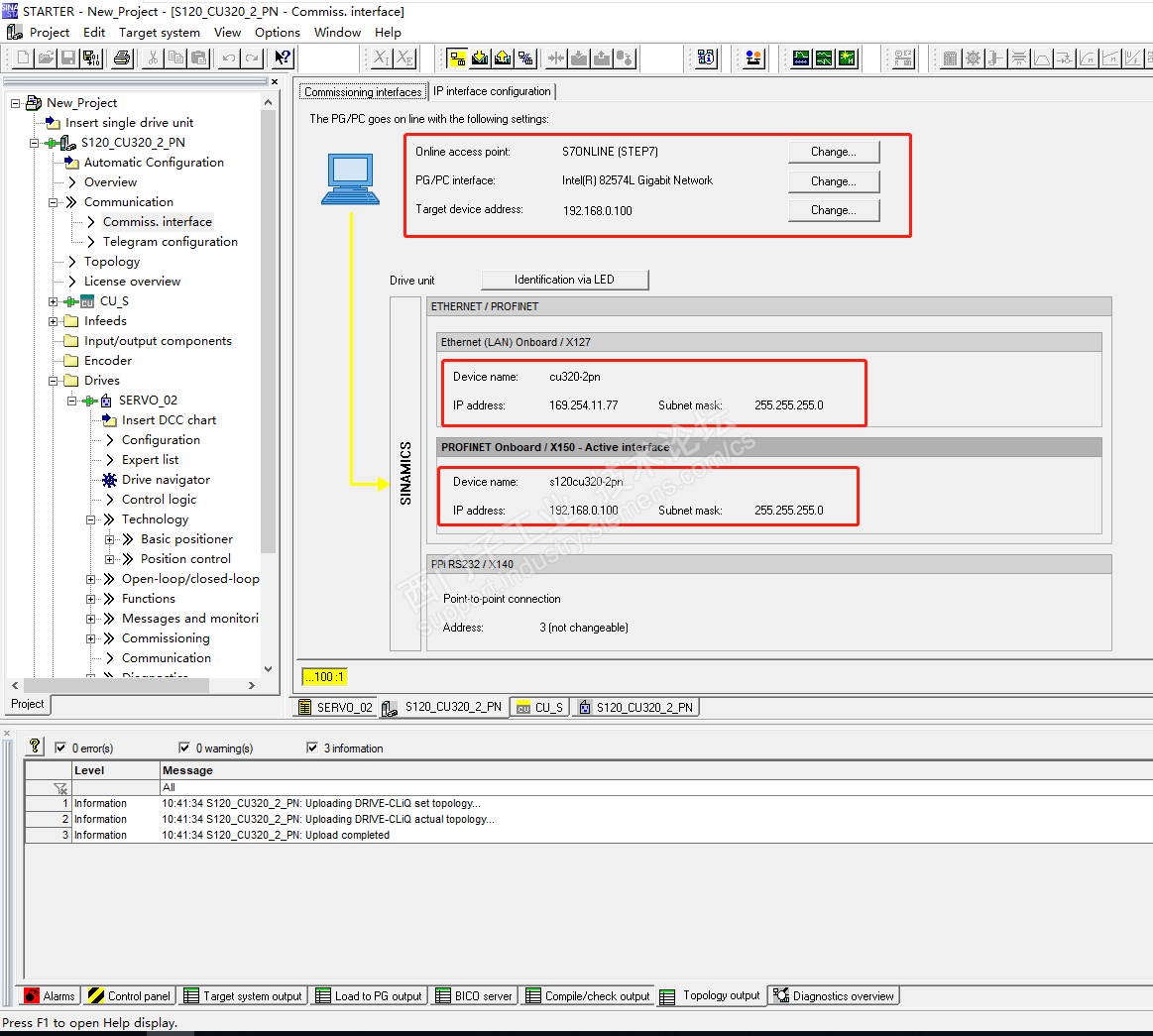
注意:CU的版本号应该和实际的保持一致 4. 建立PLC 与S120 的网络连接后,设置S120 的IP 地址及设备名称: 注意:此处的IP和设备名称应该为X150的PN口,非X127的调试口 S120的IP及设备名称可以在Starter中查看,展开Communication单击下级的 Commiss interface弹出如图所示画面,再次查看S120的IP及设备名称.
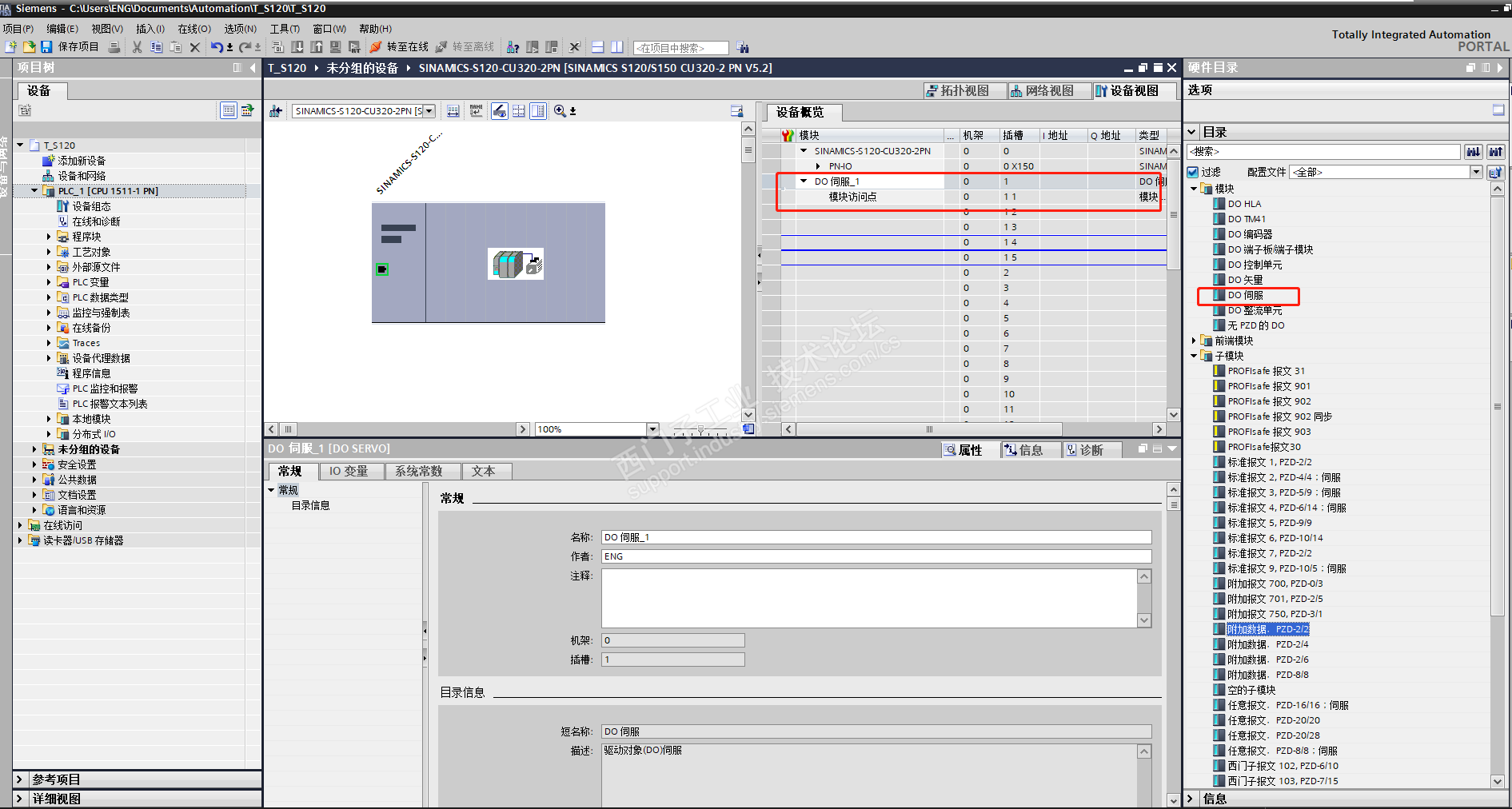
5. 在S120 的设备视图中插入DO 伺服
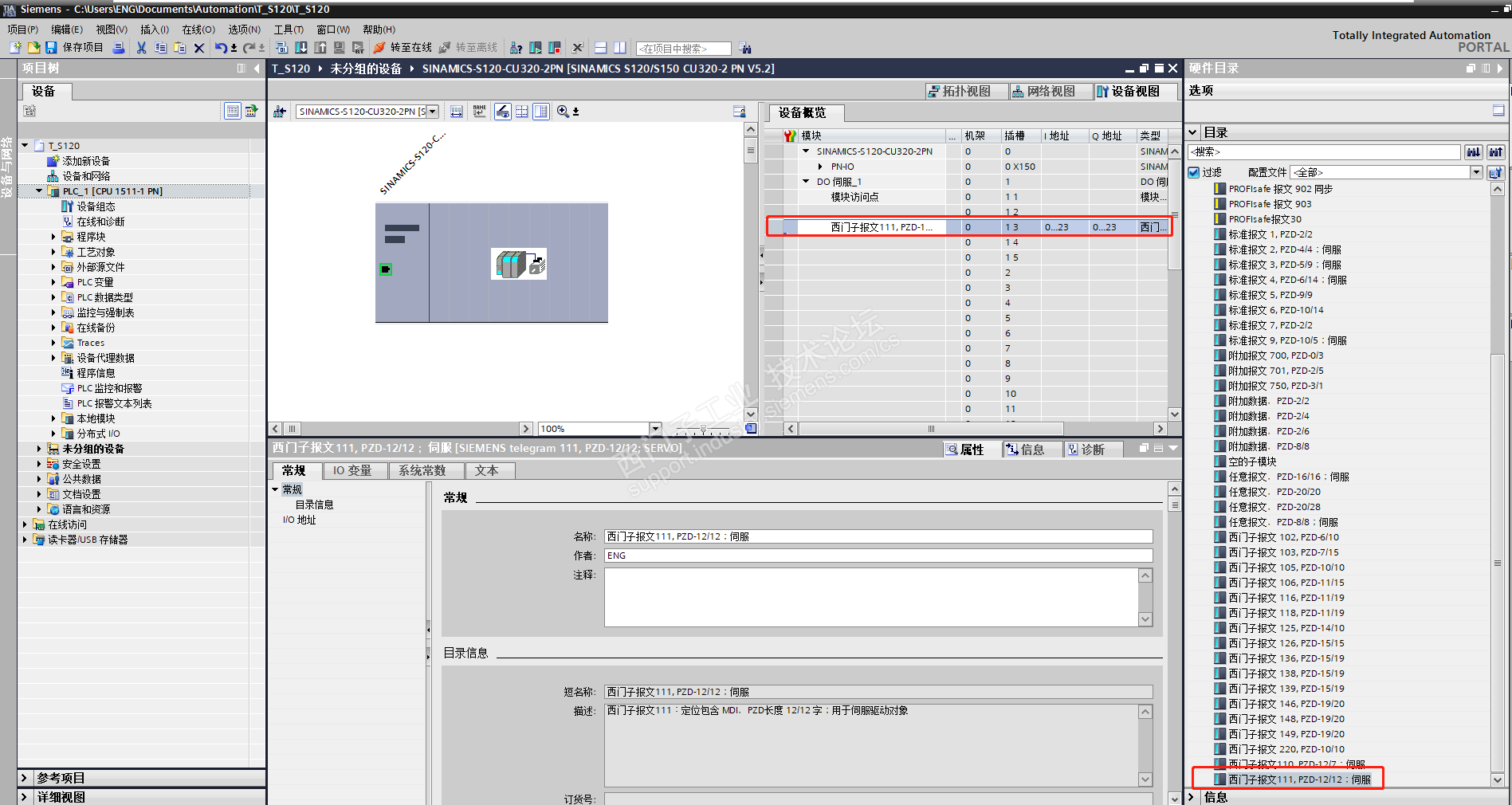
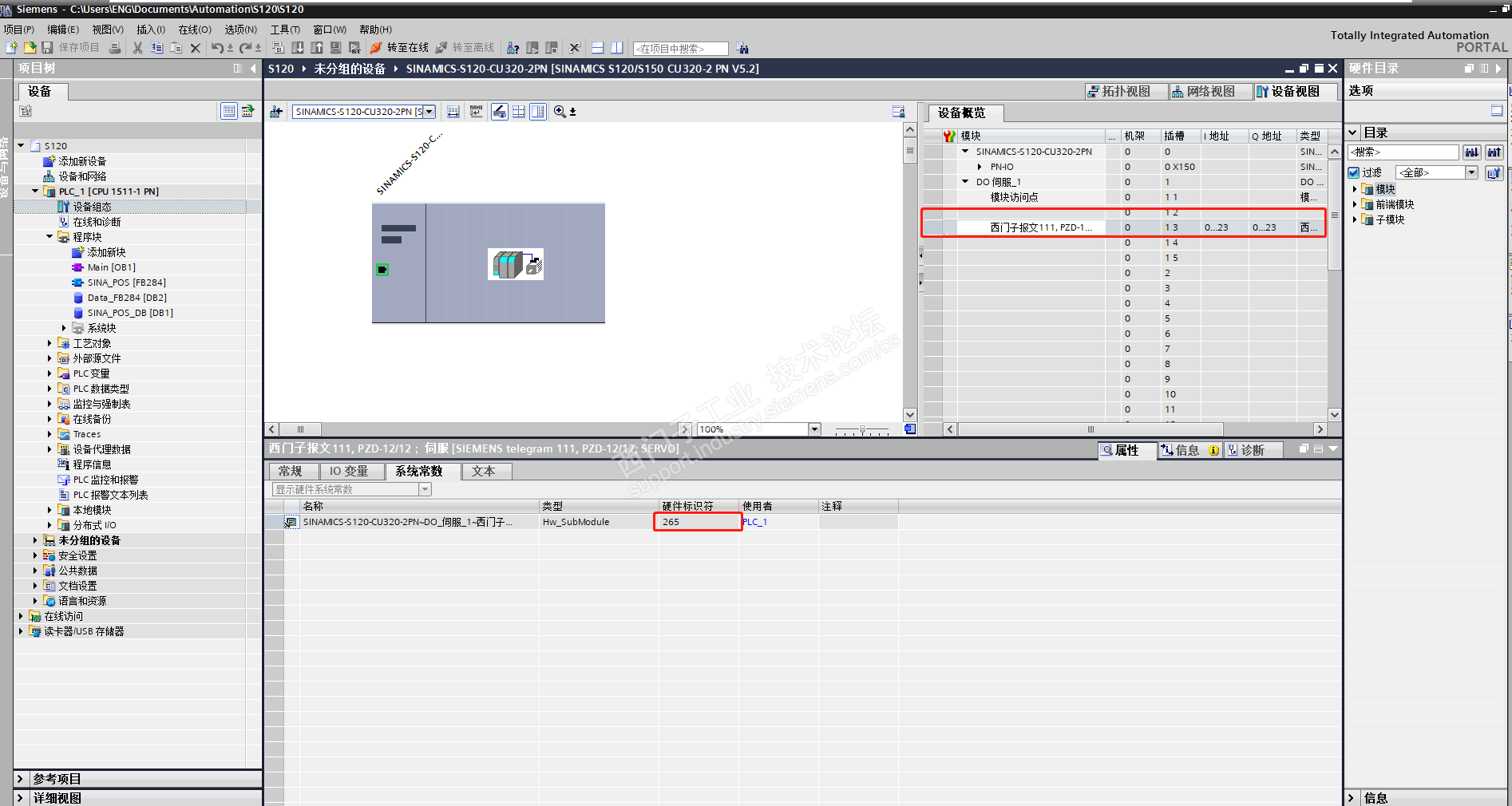
6. 为DO 伺服_1 选择一个控制报文“西门子报文111”,需要注意添加的模块和报文顺序必须和STARTER 软件一致。
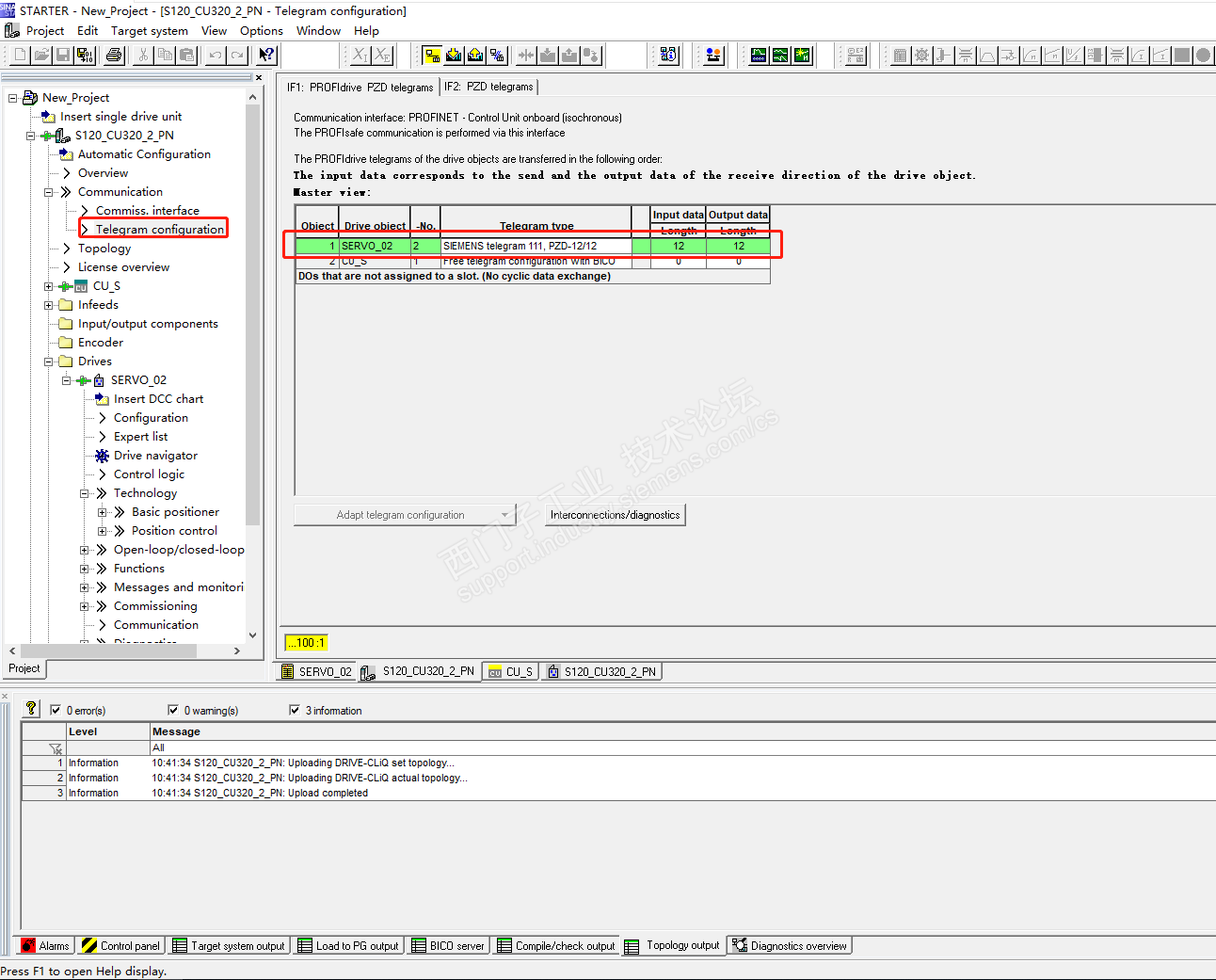
Starter中激活的报文如图所示
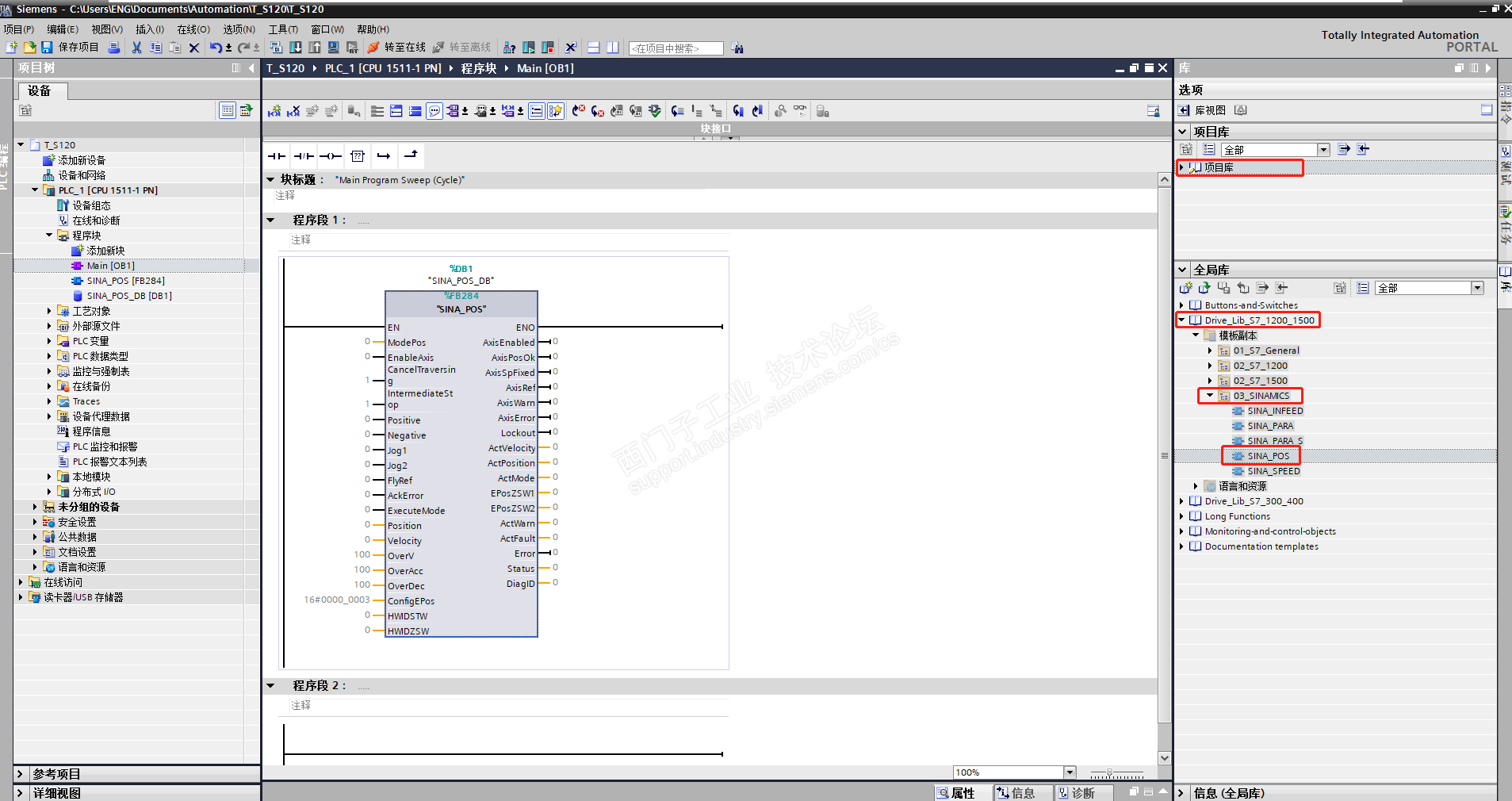
7. 在OB1 中将DriveLib_S7_1200_1500 中的SINA_POS(FB284)功能块拖拽到编程网络中:
注意:功能块HWIDSTW 及HWIDZSW 的赋值请参看下图:
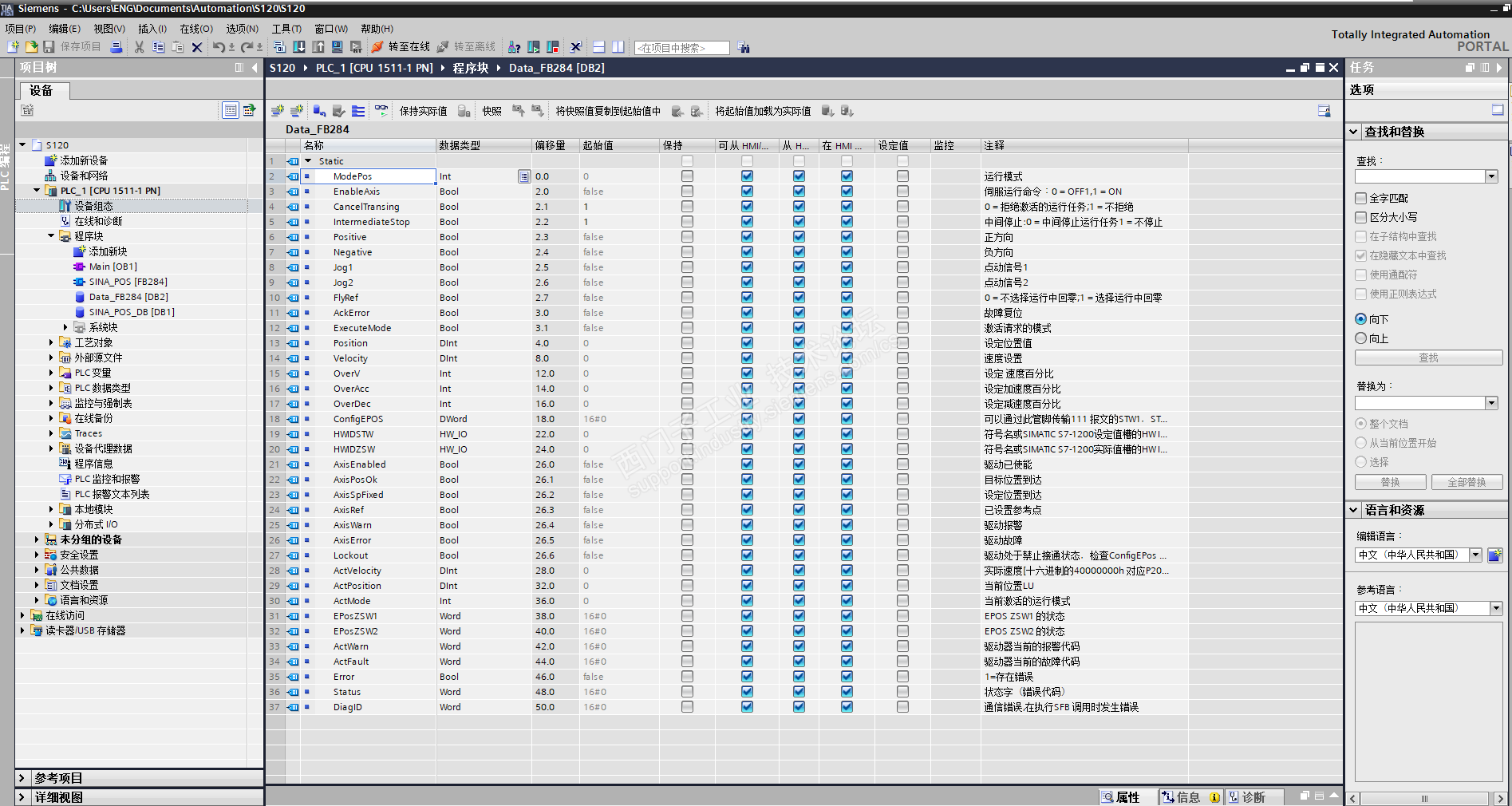
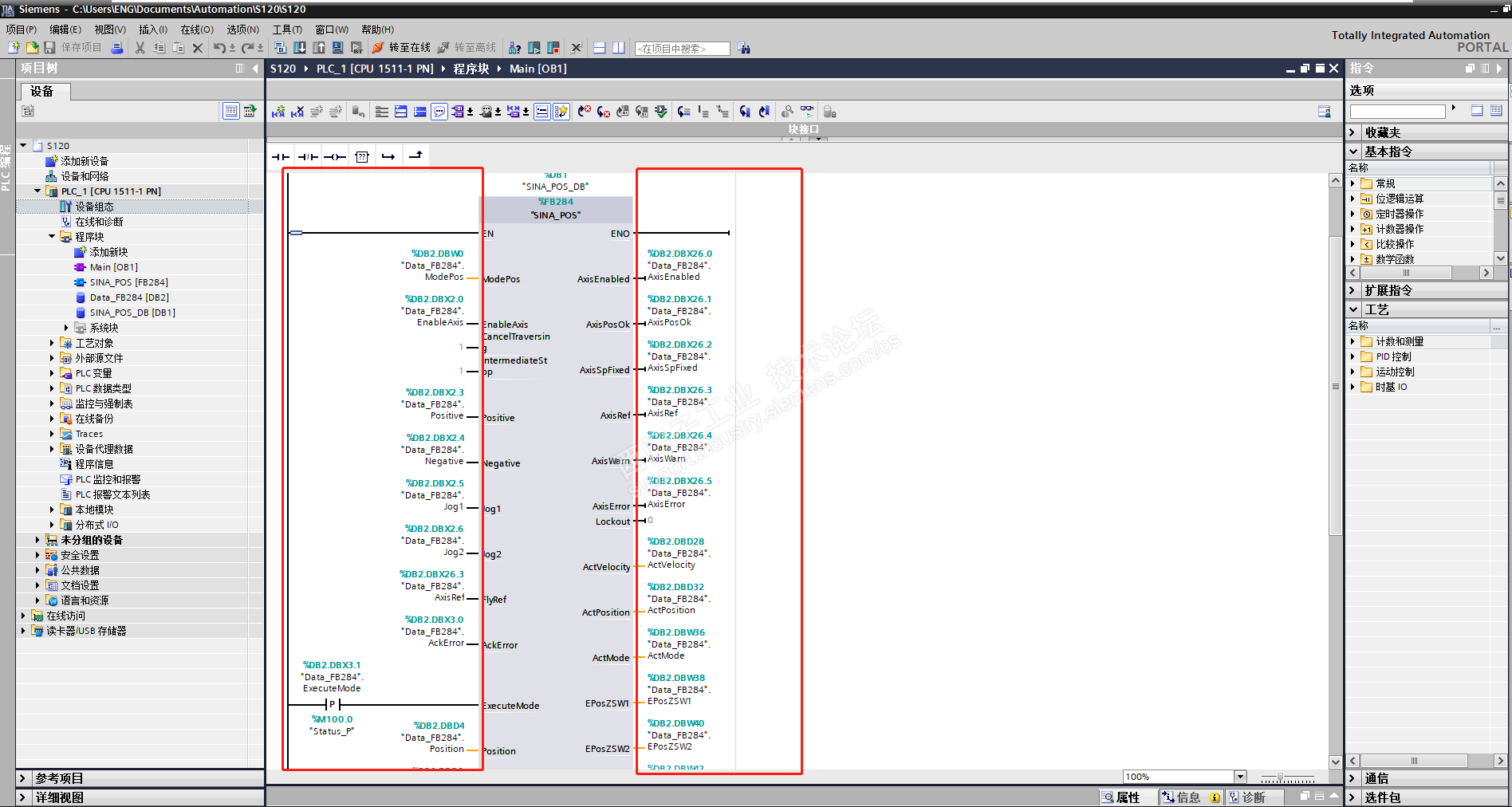
8. 创建数据块Data_FB284,并链接FB284对应的管脚
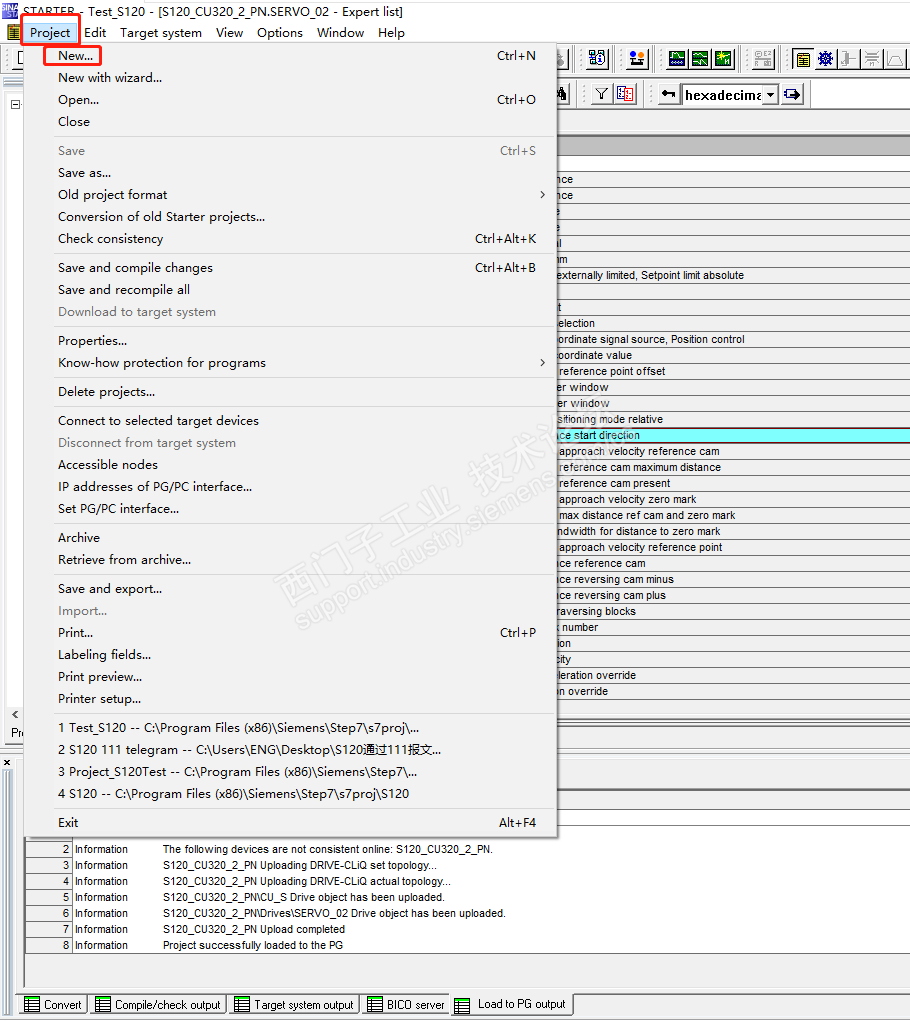
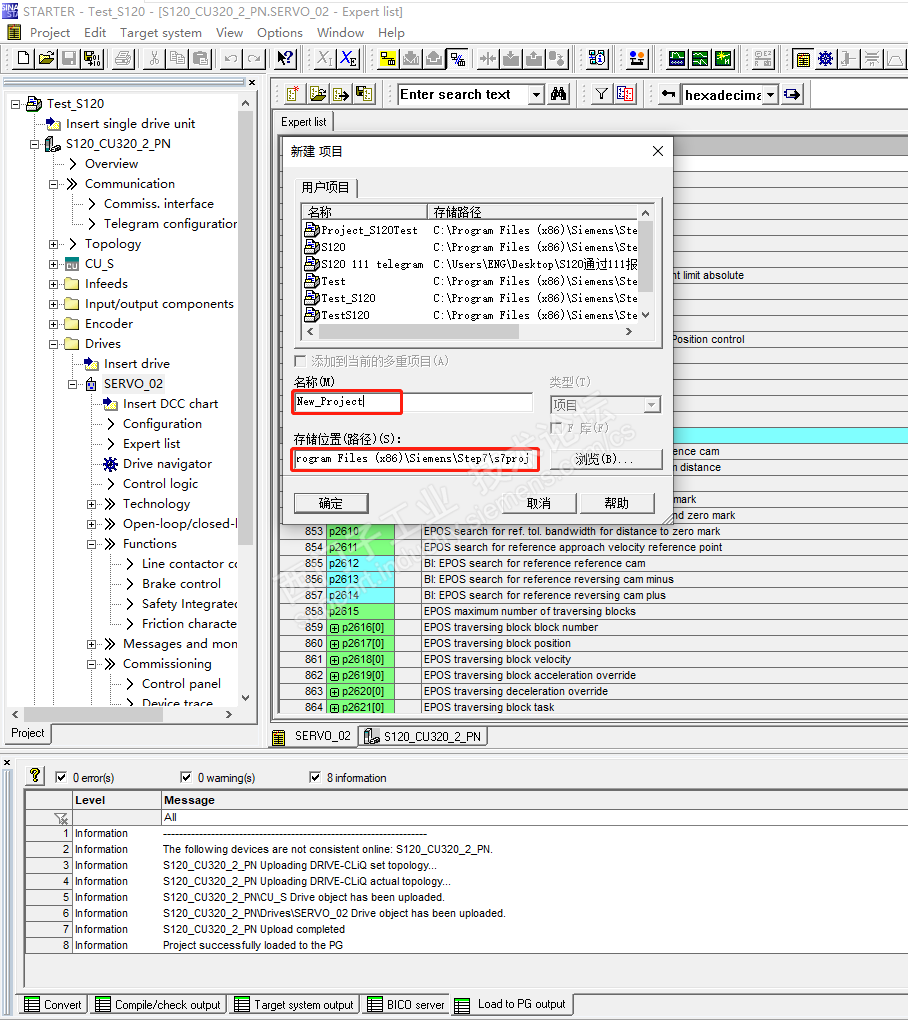
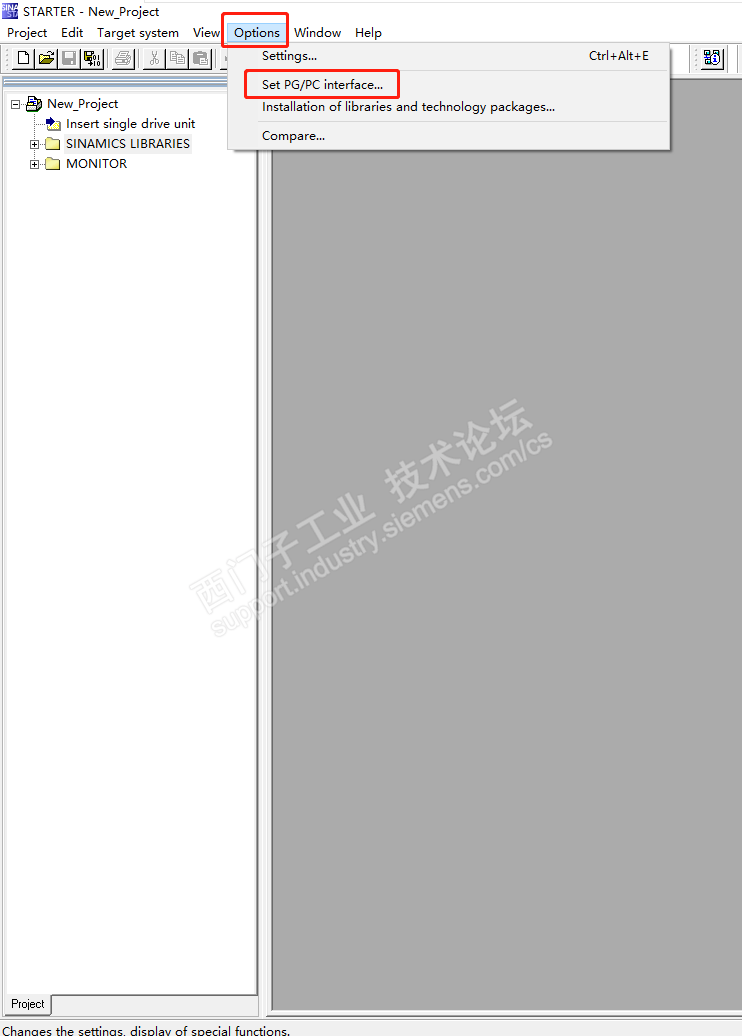
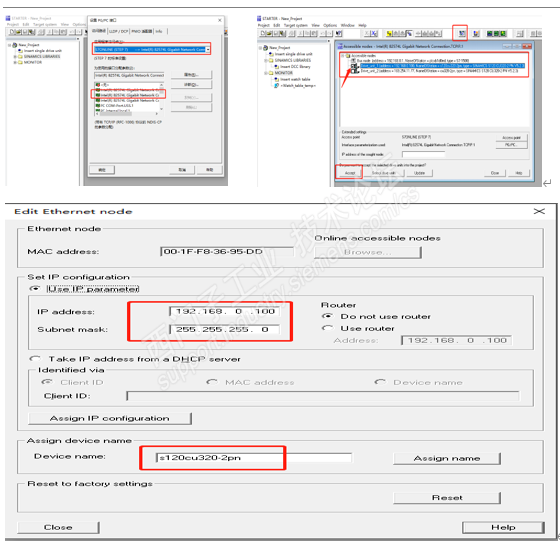
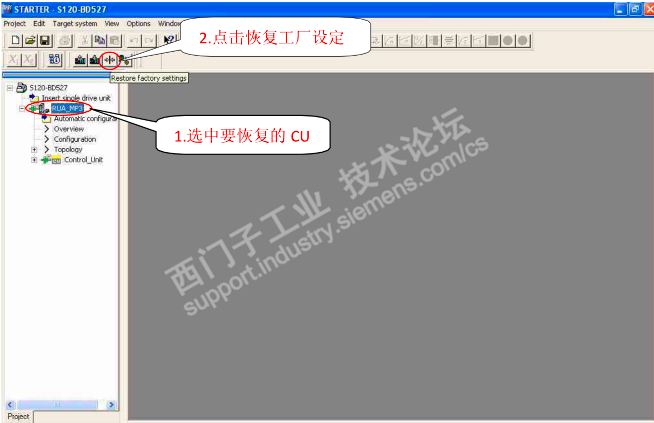
至此,在TIA Portal中的配置完成。 使用调试软件Starter对S120 进行项目配置 1. 新建项目(在线方式)打开Starter软件,单击Project,选择New,输入项目名称,选择项目存储路径,如图: 2. 单击Options,选择Set PG/PC interface,设置对应的访问点以及分配接口参数,然后在站节点编辑中分配CU的IP地址及对应的设备名称,如图: 3. 分配完IP地址和设备名称后点击“Accept”,在线链接驱动。在线自动配置之前恢复工厂设定
4. 选择在线,选择Automatic Configuration执行自动配置,控制单元的软件保存于所连接的电源模块、电机模块和端子模块驱动对象。 电机模块上控制方式通过参数p0097 设置
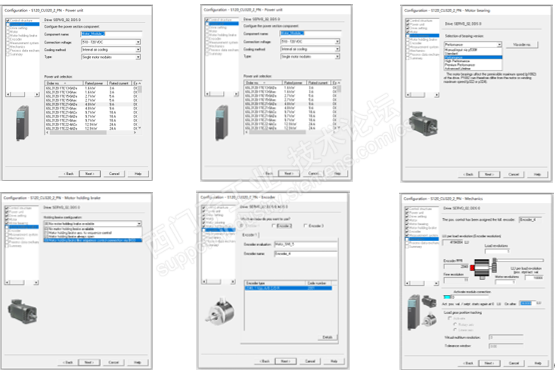
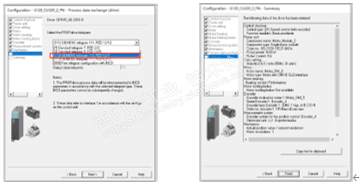
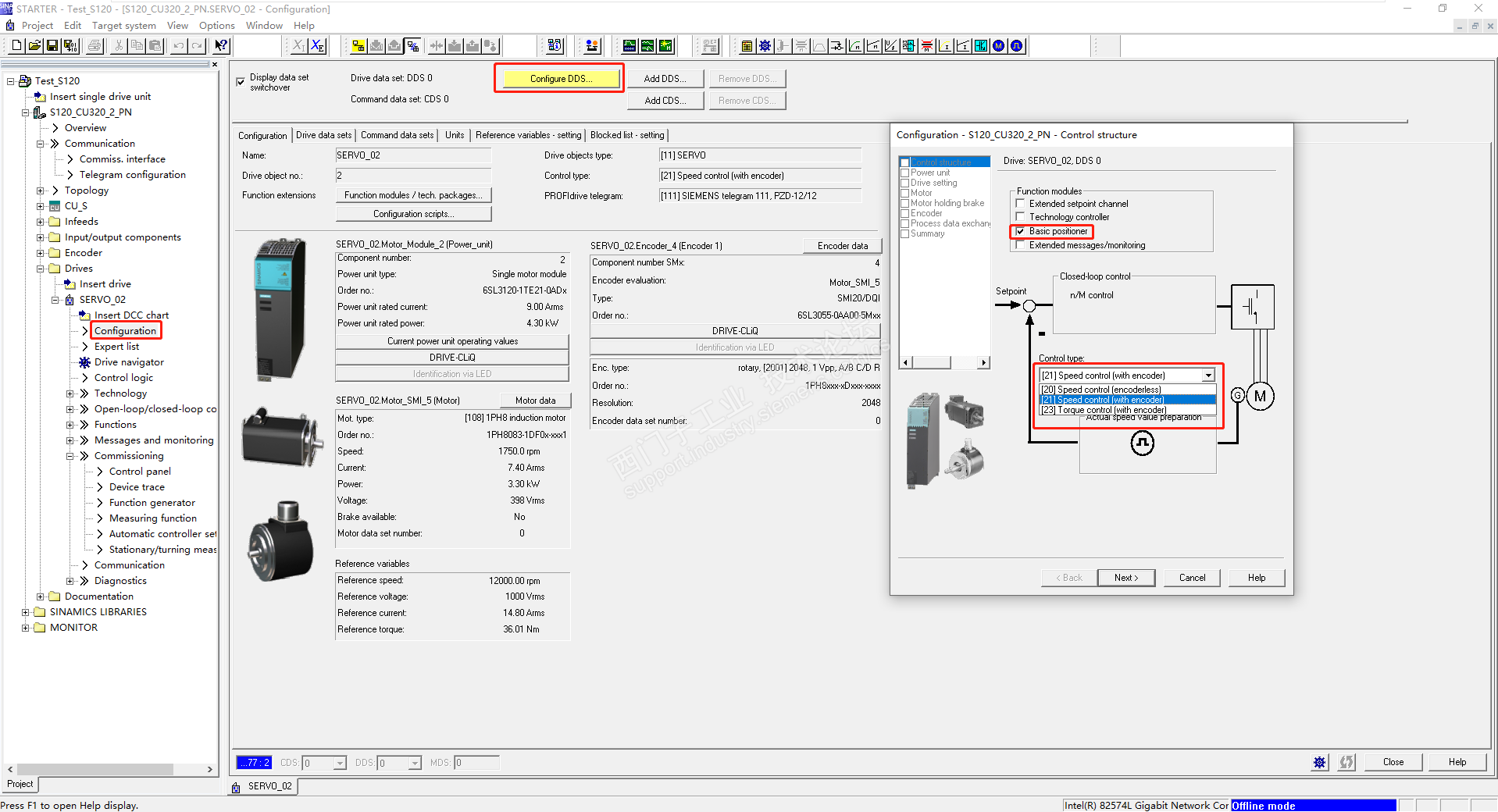
5. 完成自动组态后离线配置整流装置,逆变单元等等,双击SERVO_02下的Configuration,进入配置界面。核对电机模块的相关组件及参数,比如电机的电压 、类型、有无抱闸、温度传感器的类型、编码器的类型及型号,还可以调整机械参数,比如电子齿轮比,负载旋转1周所需的LU数,PN通讯的报文等等,配置完后会有一张参数一览表,展示之前所配置的所有参数。
6. 需要激活基本定位功能,如图:
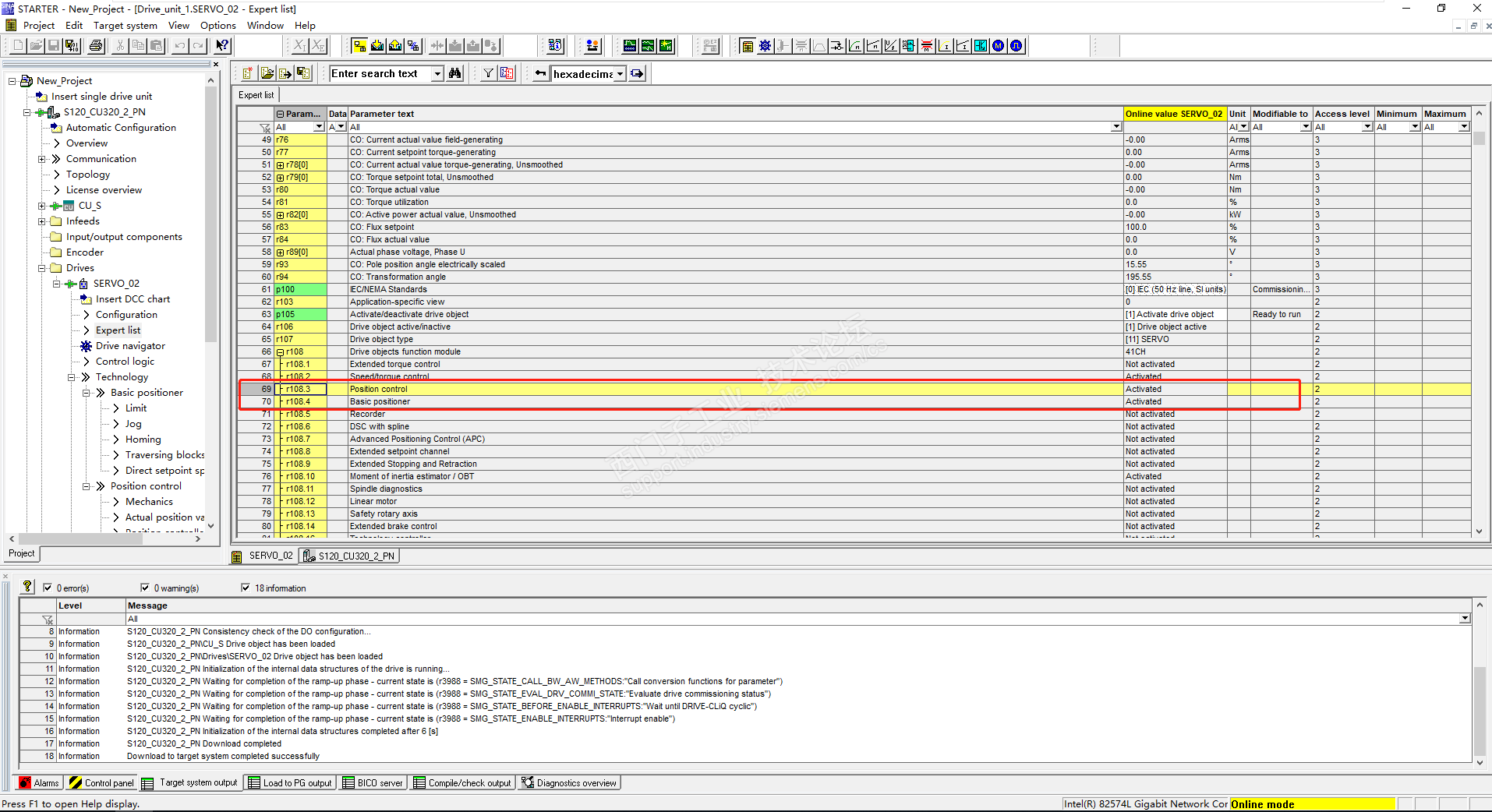
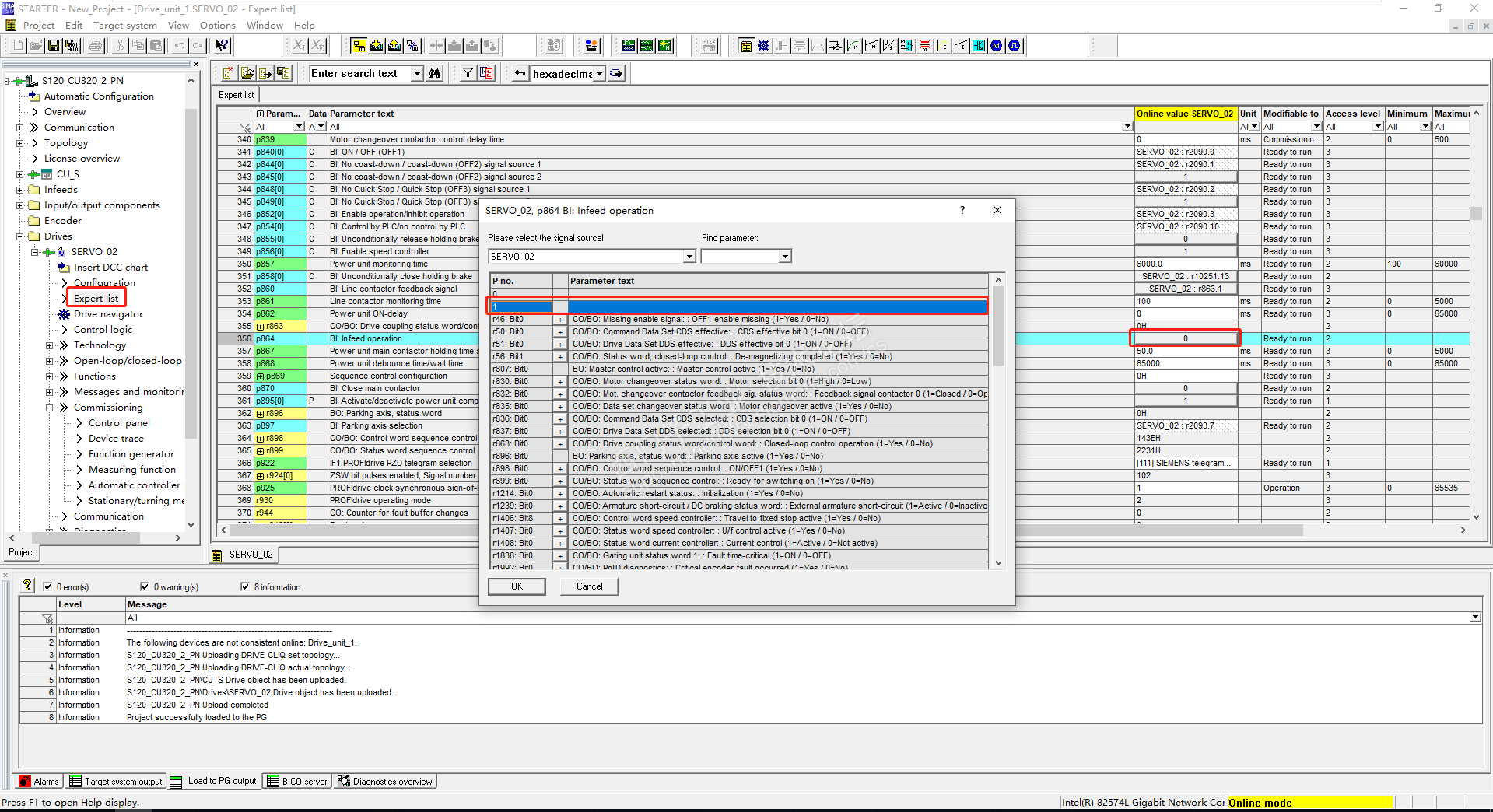
激活基本定位完成后,连接驱动器,读取参数r108.3=1,r108.4=1(Activated)表示定位功能已激活,如图: 至此S120的基本配置完成,然后保存联机下载。 7. 电机参数的静态识别及动态识别 1) 参数识别之前需要设置参数P864=1(由于功率单元没有Driver-CLiQ,需要告诉控制单元功率单元已准备好),具体操作:单击Drives下的参数列表Expert list如图:
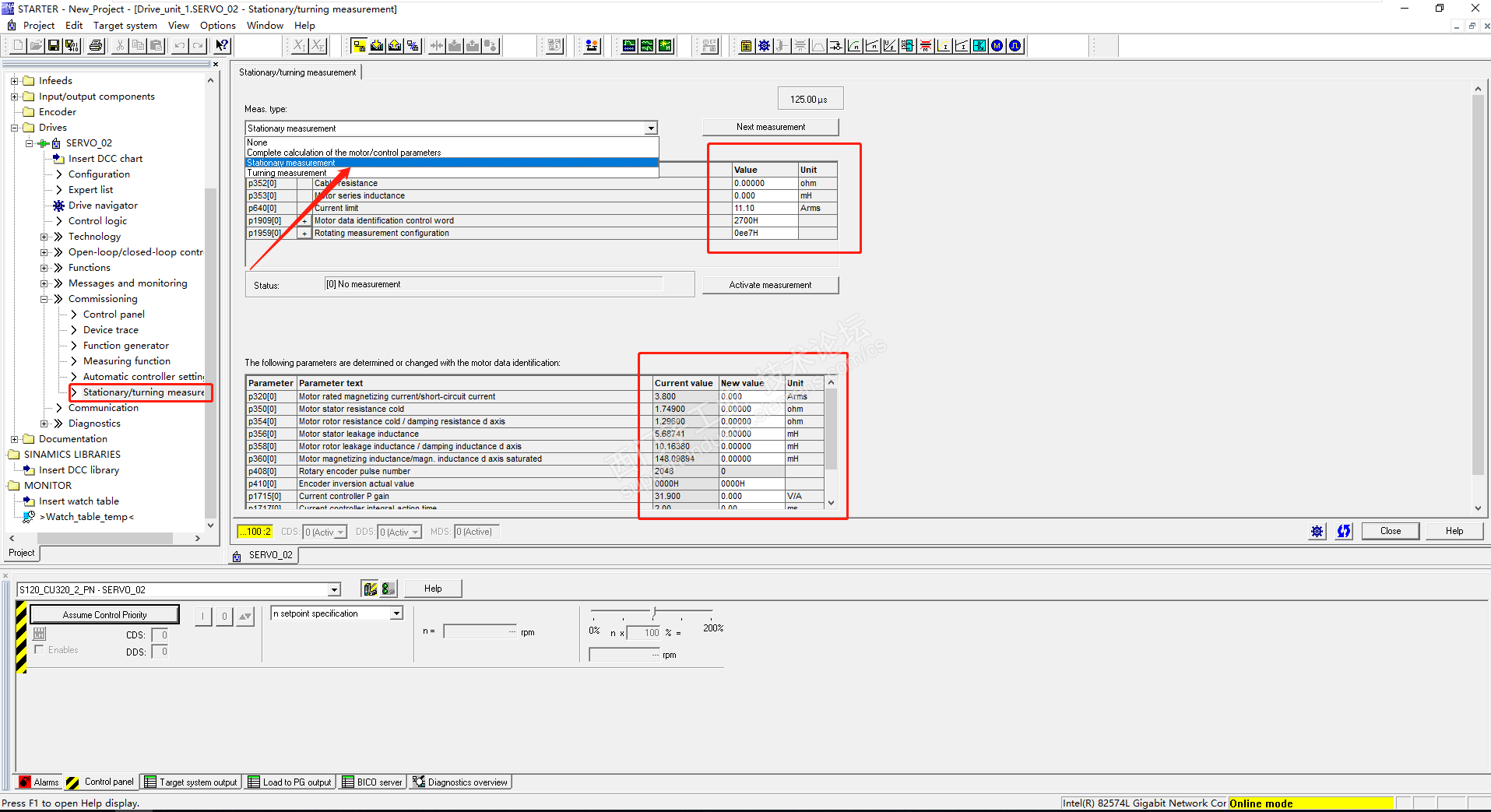
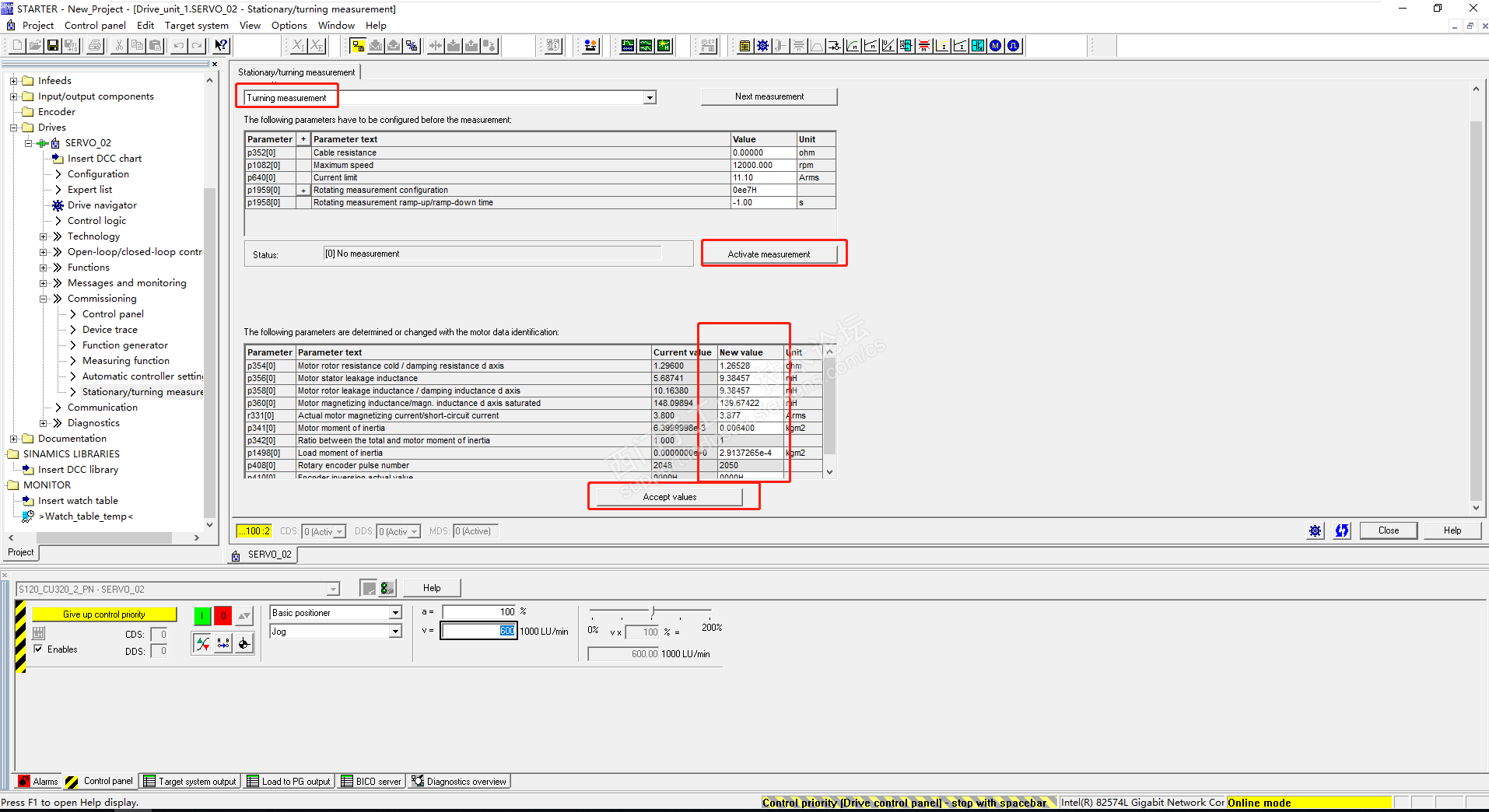
2) 单击Commissioning,选择Stationary/turning measure,如图所示,选择静态辨识Stationary measurement ,激活测量Activate measurement,然后打开控制面板,单击Commissioning,选择Control panel,然后点击Assume Control Priority获取控制权,点击是能,单击启动开始静态辨识,辨识完成后核对参数,点击Accept values保存参数,然后存盘上载,同理再做动态辨识。
图:静态辨识
图:动态辨识 五、SINA_POS 功能说明 运行条件 1. 轴通过 EnableAxis=1 使能,如果轴已准备好且驱动无故障(AxisError=0),输出AxisEnabled 信号变为1。 2. ModePos 输入用于运行模式的选择。可在不同的运行模式下进行切换,如:连续运行模式 (ModePos=3) 在运行中可以切换到绝对定位模式(ModePos=2)。 3. 输入信号CancelTraversing,IntermediateStop 对于除了点动之外的所有运行 模式均有效,在运行EPOS 时必须将其设置为 1,设置说明如下: a. 设置CancelTraversing=0,轴按最大减速度(P2573)停止,丢弃工作数据,轴停止后可进行运行模式的切换。 b. 设置IntermediateStop=0,使用当前设置的减速度值进行斜坡停车,任务保持,如果重新再设置IntermediateStop=1 后轴会继续运行,可理解为轴的 暂停。可以在轴静止后进行运行模式的切换。 4. 激活硬件限位开关 a. 如果使用了硬件限位开关,需要将FB284 功能块的输ConfigEPos.%X3 置1,激活硬件限位功能。 b. 正、负向的硬件限位开关可连接到驱动器的数字量输入点上,在驱动器调试软件Starter\Scout 项目中进行指定。如果激活了硬件限位开关功能,只有在硬件限位开关信号为高电平时才能运行轴。 5. 激活软件限位开关 a. 如果使用了软件限位开关,需要将FB284 功能块的输ConfigEPos.%X2 置1,激活软件限位功能。 b. 在驱动中设置p2580(负向软限位位置)、p2581(正向软限位位置)。 在任何运行模式下都可以通过FlyRef 输入来选择运行中回零的功能。 相对定位运行模式 相对定位运行模式可通过驱动的相对定位功能来实现,它采用SINAMICS 驱动的内部位置控制器来实现相对位置控制。 要求: 1) 运行模式选择ModePos=1 2) 轴使能 EnableAxis=1 3) 轴不必回零或绝对值编码器可以处于未被校正的状态 4) 如果切换模式大于3,轴必须为静止状态,在任意时刻可以在ModePos=1,2,3 模式内进行切换 步骤: 1) 通过输入参数Position, Velocity 指定目标位置及速度 2) 通过输入参数OverV、OverAcc、OverDec 指定速度、加减速度的百分比 3) 运行条件 CancelTraversing 及 IntermediateStop 必须设置为 1,Jog1 及Jog2 必须设置为 0 4) 在相对定位中,运动方向由Position 中设置值的正负来确定通过ExecuteMode 的上升沿触发定位运动,激活命令的当前状态可以通过 EPosZSW1、EPosZSW2 进行监控,当目标位置到达后AxisPosOk 置1 ,当定位过程中出现错误,则输出参数Error 置1。
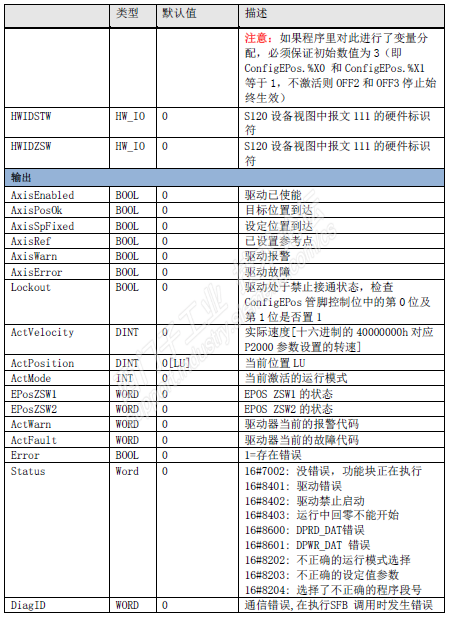
六、FB284的管脚说明
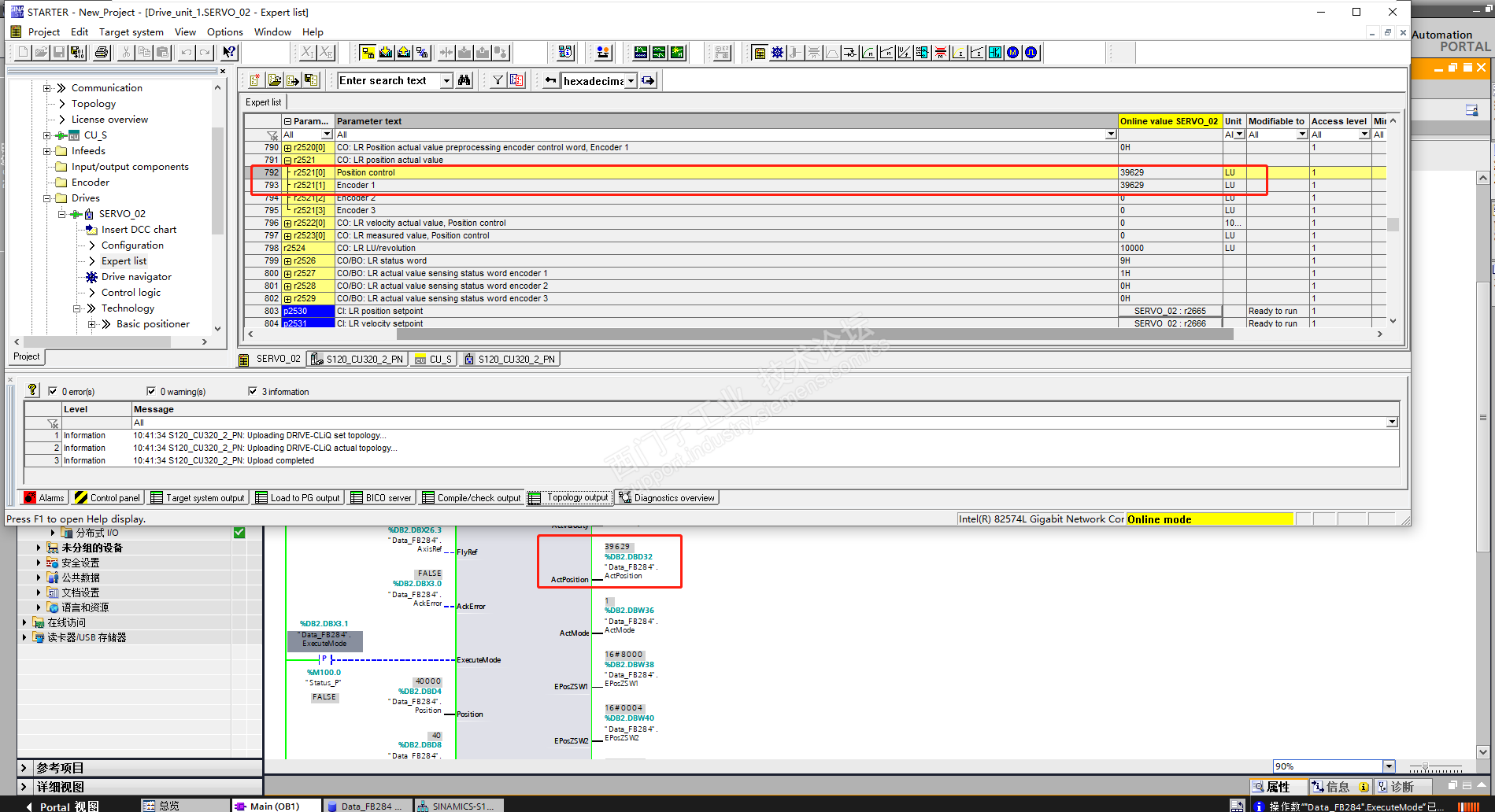
七、PLC程序演示 打开博图,将程序下载PLC在线测试,以相对定位为例:设置ModePos=1(相对定位),使能EnableAxis管脚,设置Position(位置设定值)和Velocity(速度设定值)的值,上升沿触发ExecuteMode管脚执行相对定位,完成定位后,AxisPosOk=1,ActPosition为当前所到达的位置。
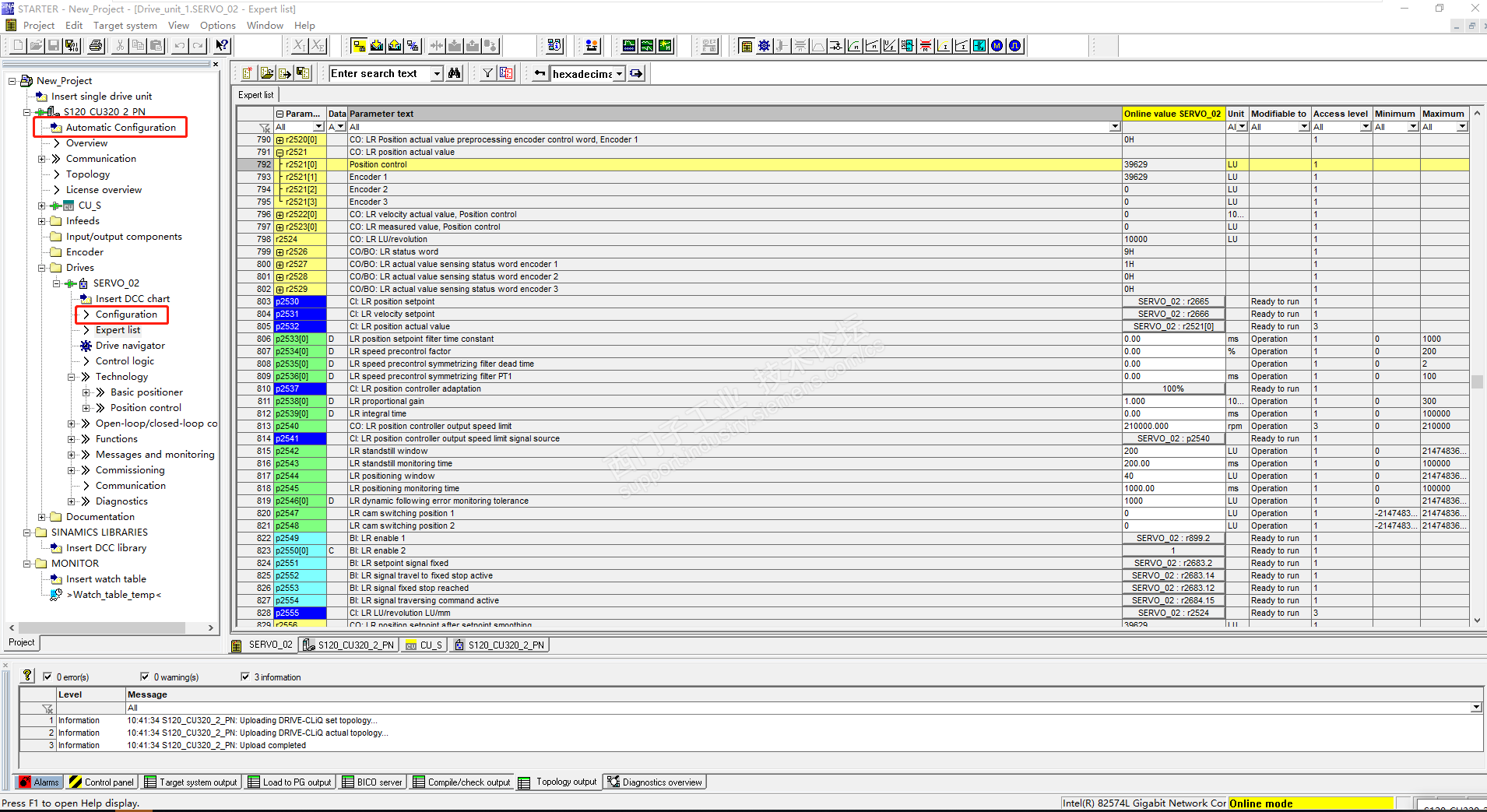
打开Starter在线读取参数,查看r2521的值为当前位置。如图所示:
八、总结 遇到的问题是CU320-2PN的CF卡固件版本太低,导致Starter不能在线自动识别硬件,后来根据文档帮助升级至最新的固件版本解决了问题。 CU320-2PN固件升级 https://support.industry.siemens.com/cs/cn/en/view/109780844 注意:如果CU320-2PN的版本太低,可以参考这个链接进行固件升级 通过此次实验,算是对S120的一个基本认识,想要达到做项目的技能,还须加强深入学习提升。
只为成功找方法,不为失败找借口!
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城