现场的同事打电话来询问:有一个带传动的直线模组,要求正方向运动为力矩夹紧控制,负方向为精准定位控制,如何设置?
我的回复是,你不妨试试111报文定位控制下的力矩限幅:
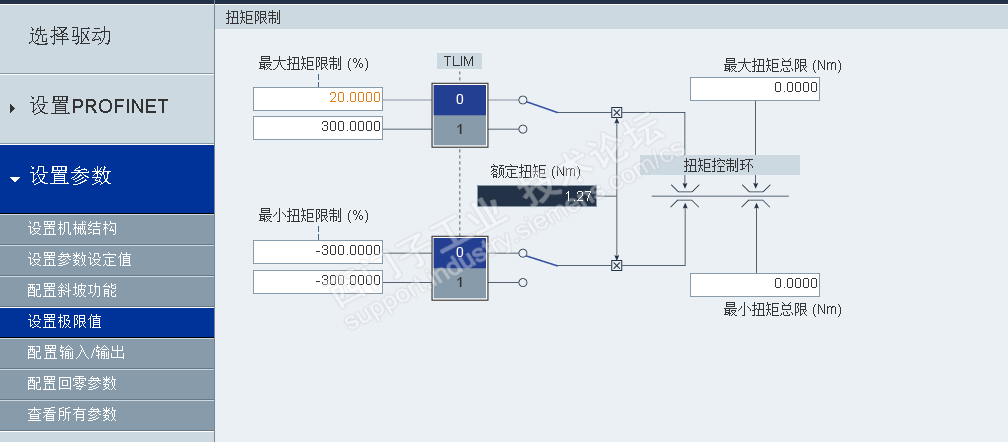
位置控制模式下,降低扭矩限制,必然会产生定位环报警,因此,必须修改相应的报警参数:

那么,问题来了,如何知道当前扭矩?

看起来,读取扭矩实际值是最直接的方法,但它不足以导向结果-当前这个扭矩合适吗?
是把当前扭矩值和设定扭矩值放在plc程序里比较,还是放在伺服驱动器里去比较?
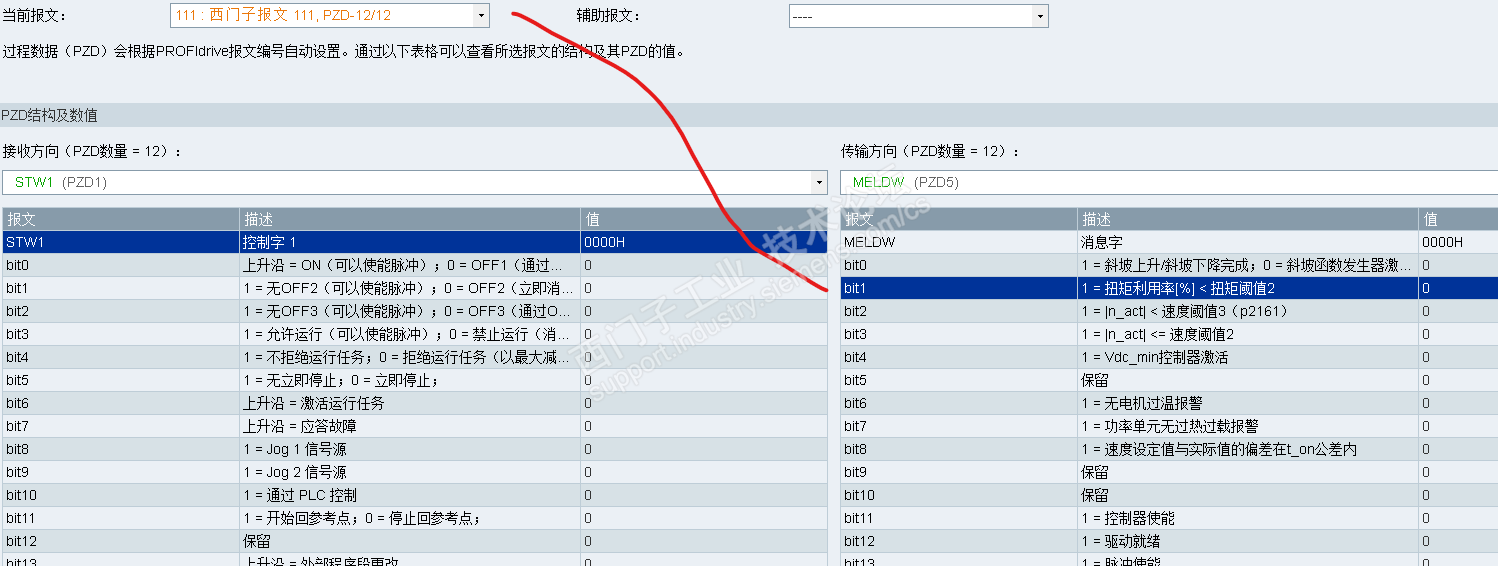
利用状态字”MELDW . bit1“结果,无需在程序中去比较扭矩实际值是否已达到设定值。



















 西门子商城
西门子商城 西门子中国
西门子中国



 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












