CU250S-2驱动永磁同步电机EPOS定位应用中有几个注意事项:
1、驱动永磁同步电机控制模式P1300=20,不可以使用21(编码器反馈),电机参数、磁极识别等问题。
2、需要注意机械结构,本行业有俩种轮轨式(存在打滑,需要加装激光测距),齿轮齿条(本例子中使用的,皮带轮带齿轮齿条结构,德国库伯勒SSI绝对值编码器安装在伺服轴上)
3、EPOS功能调试
本项目中的应用为玻璃设备中空玻璃理片线中的接片小车。

国产杭州永磁同步伺服,铭牌如下图所示:
问题1出现:
磁极位置识别功能可以确定同步电机的电气磁极位置,在基于磁场的控制中需要该位置。
可以通过参数P1980来选择磁极识别的方法:
p1980 = 1、8:通过p0329 设置电流振幅。
p1980 = 4, 6:第一检测阶段的电流振幅通过p0325 设置,第二阶段的通过p0329 设置。
p1980 = 10:使用电机额定电流进行调准。
P1980=1在磁极识别时会发出比较大的响声。P1980=10识别磁极系统会轻微晃动(不适合提升应用),不响。
上图电机参数中1500RPM电机,厂家销售讲50HZ电机,这样就该是4极电机,静态识别可以过。脱开机械动态识别也无法通过。手动调整参数后,在P1755矢量切换速度(默认200)处会出现非常大的速降,位置环不稳定,导致机械严重抖动。P1755设置2000RPM直接不切换模型后解决。但系统加速度只能调到约2M/S2,后跟厂家技术沟通得知应该是额定频率100HZ,8极电机,重新调试后加速度能调到3M/S2。
2、
机械参数验证如上图。
3、调试步骤为先进行快速调试,再对驱动器的速度环进行手动优化,使得速度跟随性良好,最后再调整位置环比例以及前馈。默认位置环比例1,最终调到0.3,EPOS位置前馈本项目中设置为80%。如果是激光测距这种由于机械响应相对于电机的滞后,容易引起震荡,位置环比例会小很多。具体可以参考西门子1847会员网站中搜索关键字“G120 EPOS基本定位功能关键点系列”。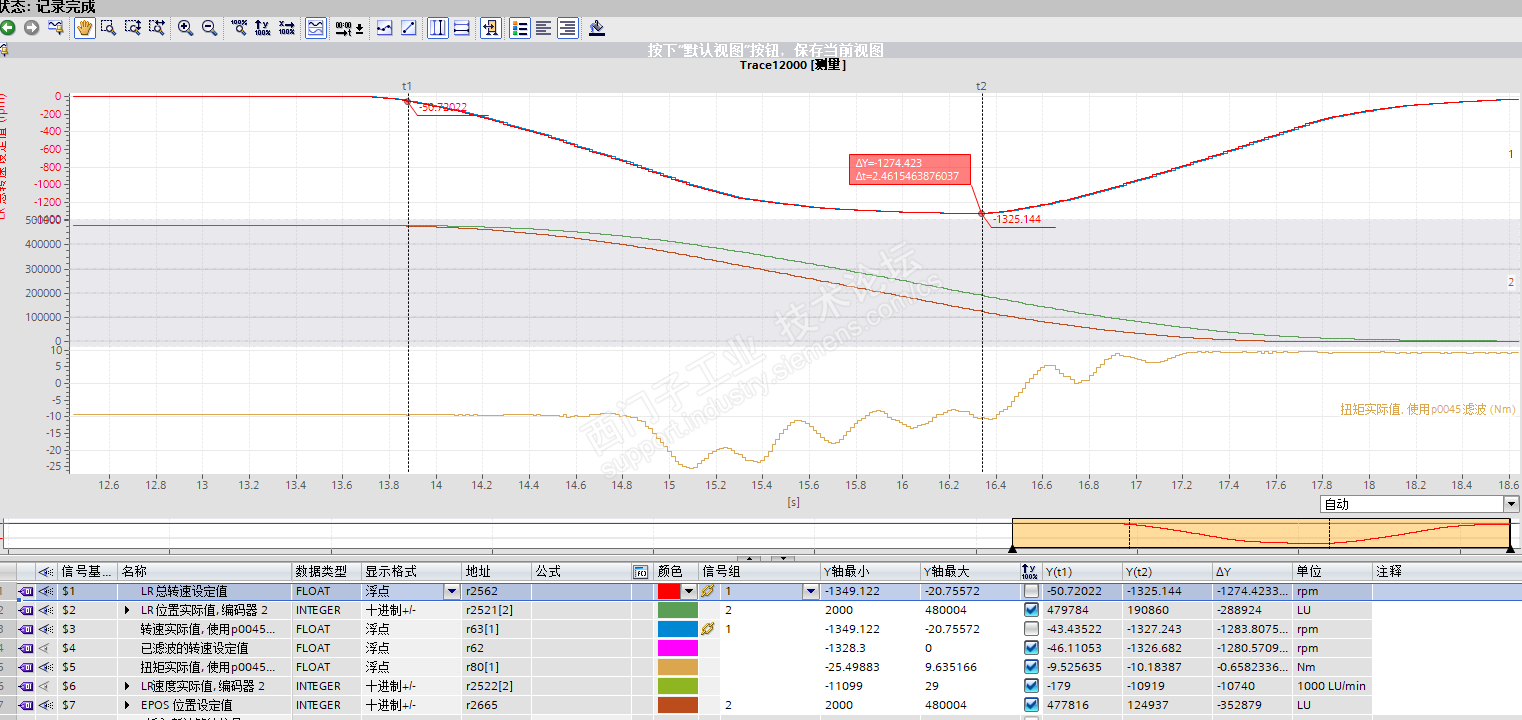
调试中遇到F7450 F7451等问题可以参考CU250S-2基本定位调试手册。










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐











