以前分享了一些简单的阀门,间接寻址,串口通讯,模拟量配合PID/PWM,阵列扫描等案例;现在分享以下几个指令的用法.
三-(1)PLS指令用法--最简单的纯开环"中断定位";V2.7加强版的运动控制固件已经很完善了,如果是V2.7版本的PLC几乎不需要PLS了,并且V2.7针对PLS加强了其超驰功能;"几乎"也并不是全部,更何况有些没法升级的PLC硬件,而且普通的PLS指令本身也是有自身的一些特点的.
以前有很多工程师用PLS指令做出不错的定位程序:如"简单追剪"......
PLS指令的介绍以及需要用到的三个中断
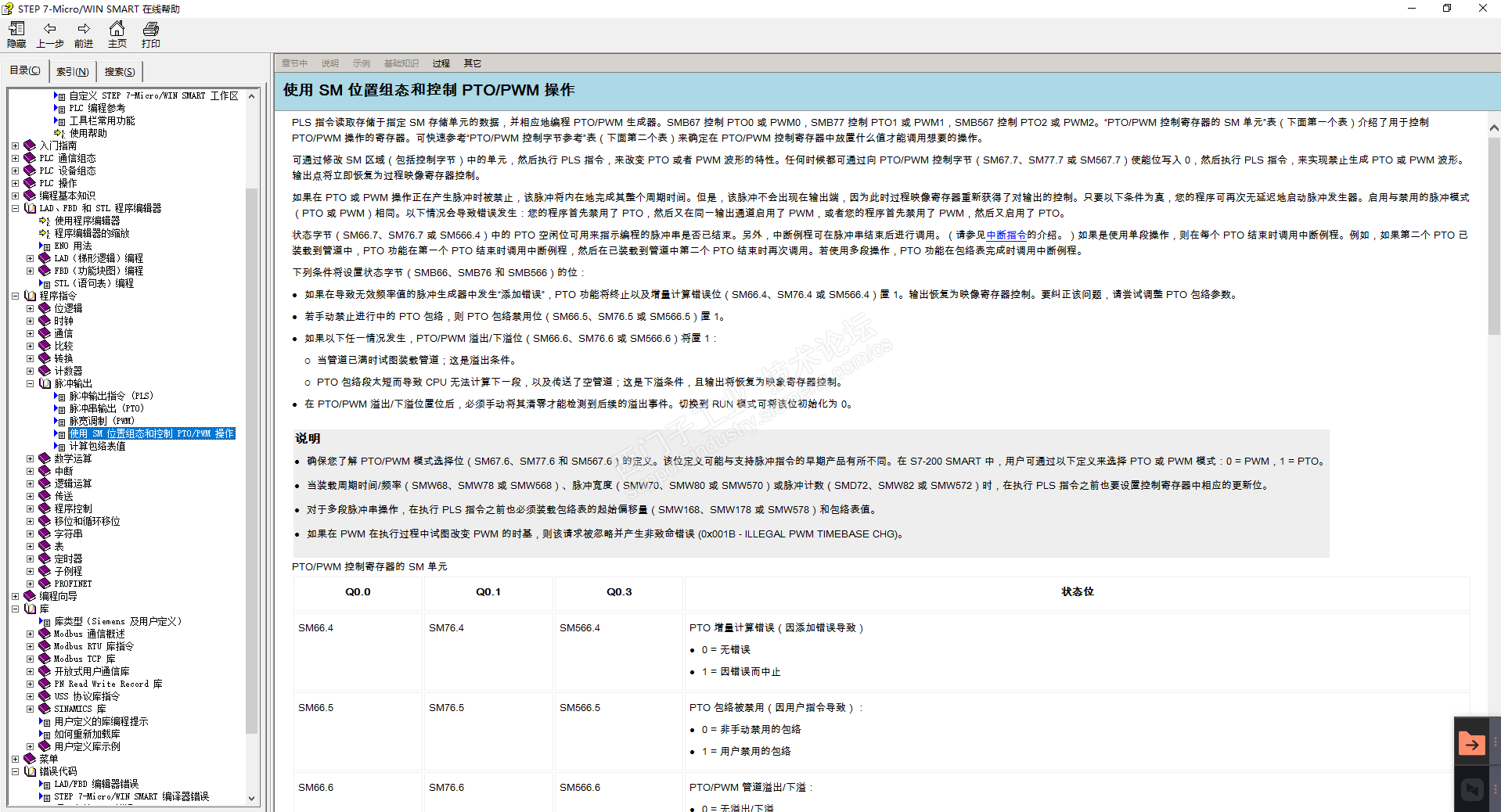

针对PTO0
SM66.7:空闲中;本例1中利用该空闲位判断脉冲发完,并紧接着发送下一份脉冲串。
SM67.6:选择PWM/PTO:本例1中长为1,从不复位成0。
SM67.7:启用:本例1中长为1,从不复位成0。
SMW68:PTO频率(单段管道范围1HZ-65535HZ):本例1中由SMD72配合Ts==2ms实时推算出SMW68。
SMD72:PTO脉冲计数值:本例1中匀速由外部指定,减速由减速算法给出。
定时中断-10(SMB34):本例1设置成2ms。
PTO0脉冲计数完成中断-19:本例1中暂未用。
高速IO中断:本例1中暂未用。
素材就是这些,想从这些素材中提取出简单的"中断定位"方案,还是需要简单的实践摸索的,速度/精度这两个参数本身就是有一定制约:想速度快,精度有可能降低;想精度高,速度有可能降低,当然高性能驱动器+执行器除外.










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐










