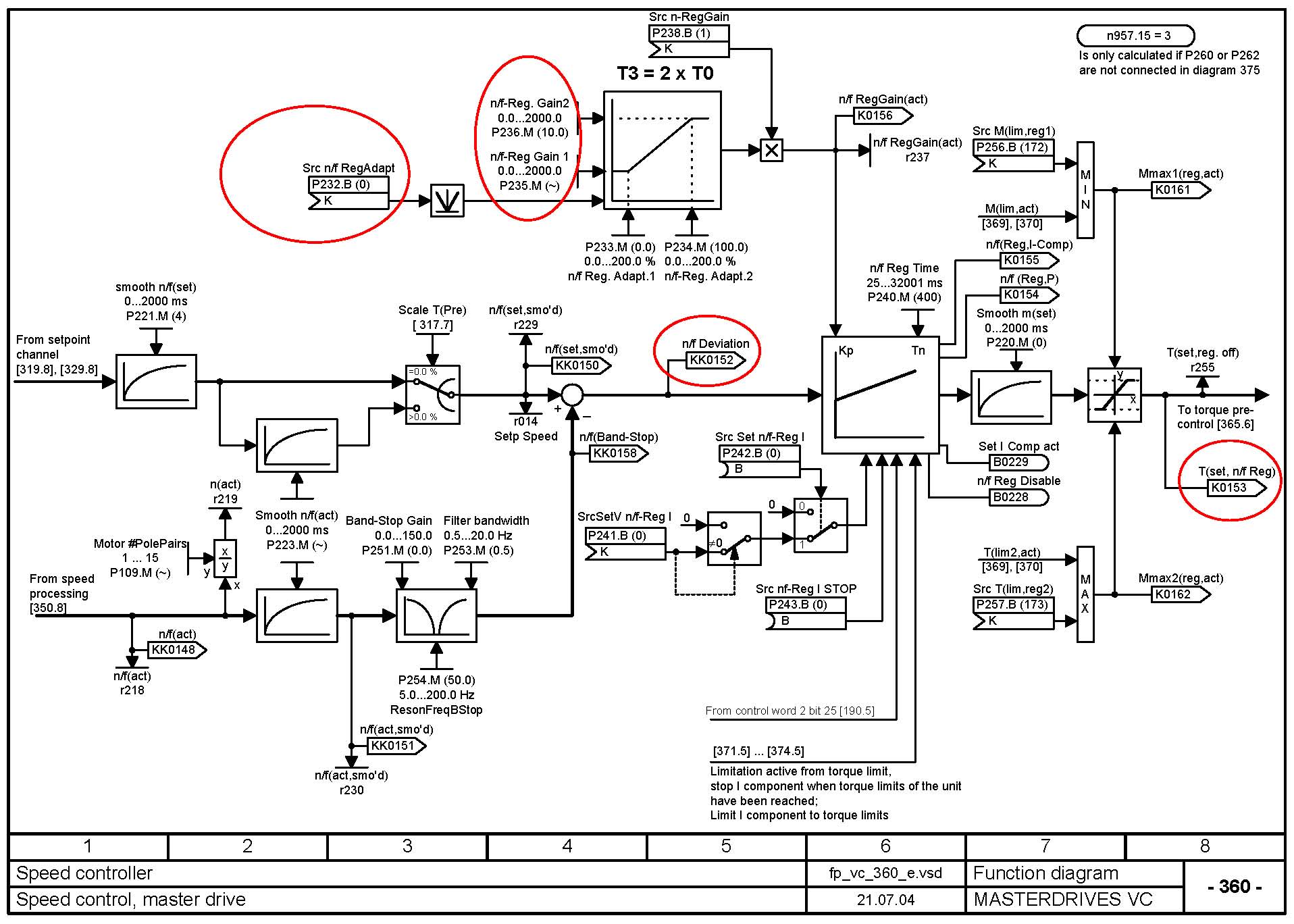
针对此楼的问题我也说两句。6SE70的速度调节器自适应参数设置功能如上图示,红圈部分既是相关的节点。当然还有很多可以选择的参数作为速调自适应的给定选择。
首先,我对自适应的调节器参数这个功能,很少用在速度调节器上。因为,我所面对的应用环境,速调用不着自适应,一个固定的PI时间常数的参数设置足够了。他完全能满足我在0-100%的转速范围内调速、运行稳定。所以用不到;
第二,我认为闭环控制的调节器,自适应功能不是解决超调问题的,而是解决在宽调节范围内,固定的PI调节参数很难覆盖其整个区间控制稳定的问题。比如说,在低速时和在高速时,两种状态需要两种PI参数才能控制稳定;再比如,小负荷与大负荷需要两种PI参数才能稳定。自适应就是解决这个问题的。如果解决超调问题,不是PI参数本身能解决,而是靠补偿控制去解决,效果很好。比如,前馈控制;反馈的微分控制等等;
第三,调节器的自适应,一般都是用在自己搭的调节器上,比如转矩的闭环控制;发动机的油门执行器恒转速控制等等。这些调节器,一般都不是传动控制的双闭环上,而是附加的三环系统或其他的外加闭环系统。在西门子的6RA70和6SE70以及MM440等交直流控制器上的速度调节器,我还没有发现采用一个固定的PI参数不能满足稳定控制的情况或需求;
第四,所以6RA70的调节器功能比6SE70强,那是因为6SE70的上市在先;6RA70在后,现在的G系列和S系列的产品。调节器的自适应参数都是很强的。越是新出的产品,参数的功能也随之越强;
第五,自动控制技术,随着模拟时代被数字时代的取代,从控制方法上出现了许多的改良,过去模拟时代采用硬件电路不好实现的控制方法,数字时代都无所不能。如果注意到西门子控制器中“自由功能块”的PI调节器,你会发现,他有许多的功能,可以实现传统PI调节不一样的控制模式。自己动手玩一玩,试一试,很有意思的。他的比例功能和积分功能可以分别独立控制,当给定值与实际值差别很大时(突加给定或突加负载的时候),比例运算起作用,当给定值接近实际值时,积分运算起作用。此时的积分运算仅仅起微调作用,缩短了动态调节时间,提高了系统稳定性(收敛性),又做到了系统无静差。



















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












