quote:以下是引用凌波微步在2013-03-16 20:13:35的发言:quote:以下是引用Automann在2013-03-15 15:03:32的发言:
单纯的P调节只要增益小,肯定能稳定(没超调),问题是稳态误差与增益成反比,单纯的P调节不能兼顾稳定性和稳态误差。PI或PID可实现超调小和无稳态误差。
我的表述不准确,谢谢廖老师的指正。我已经修改了我相关帖子。
我们来看一下纯比例的公式:M(t)=Kc*ER(t); ER(t)=SP(t)-PV(t)
如果SP不变,Kc不变(我们在实际调节过程中经常使用的方法),那么M(t)与PV(t)就是一个线性关系。
Kc值越大,M(t)越大,输出变化越快。
那么,如果Kc值恰好可以使得PV变化后=SP值,那么M(t)=0,但在实际当中,Kc的值应该是多少,才能是理论上的这个点呢?
考虑到PID调节输出的精度,调节阀门或变频器等设备的控制精度,我们很难找到这个准确的Kc值。即使找到理论上的Kc值,可能由于精度过高,而无法与控制设备的精度相匹配,也很难达到精确到位。
如果Kc太小,那么调节效果如何?------缓慢,作用效果不明显。
如果Kc太大,调节效果如何?-------过快,容易超调,作用效果过强。反而会出现震荡。
---------其实我所说的不稳定,指的就是这种不稳定。我的想法是在Kc有较好的效果的基础上。
不知我的理解是否正确。请廖老师及其他大侠给予指正。
1. “ 如果SP不变,Kc不变(我们在实际调节过程中经常使用的方法),那么M(t)与PV(t)就是一个线性关系。”
这个结论有点问题,比例控制时M(t)和误差成正比,而不是和PV(t)成正比。
2. “如果Kc值恰好可以使得PV变化后=SP值,那么M(t)=0,但在实际当中,Kc的值应该是多少,才能是理论上的这个点呢?”
如果闭环中没有积分环节(即控制理论中的0型系统),稳态误差和开环增益成反比。要想PV=SP(误差为0),增益应为无穷大,显然是不可能的。换句话说,纯比例控制不能消除稳态误差,所以要用PI代替比例控制。
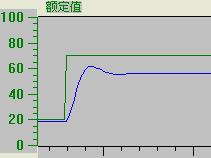
下面的两个图都是比例控制,一个增益小,较平稳、稳态误差大,第二个增益大,波动较大、稳态误差小。




















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












