动动更健康,呵呵,这样看能否满足要求:
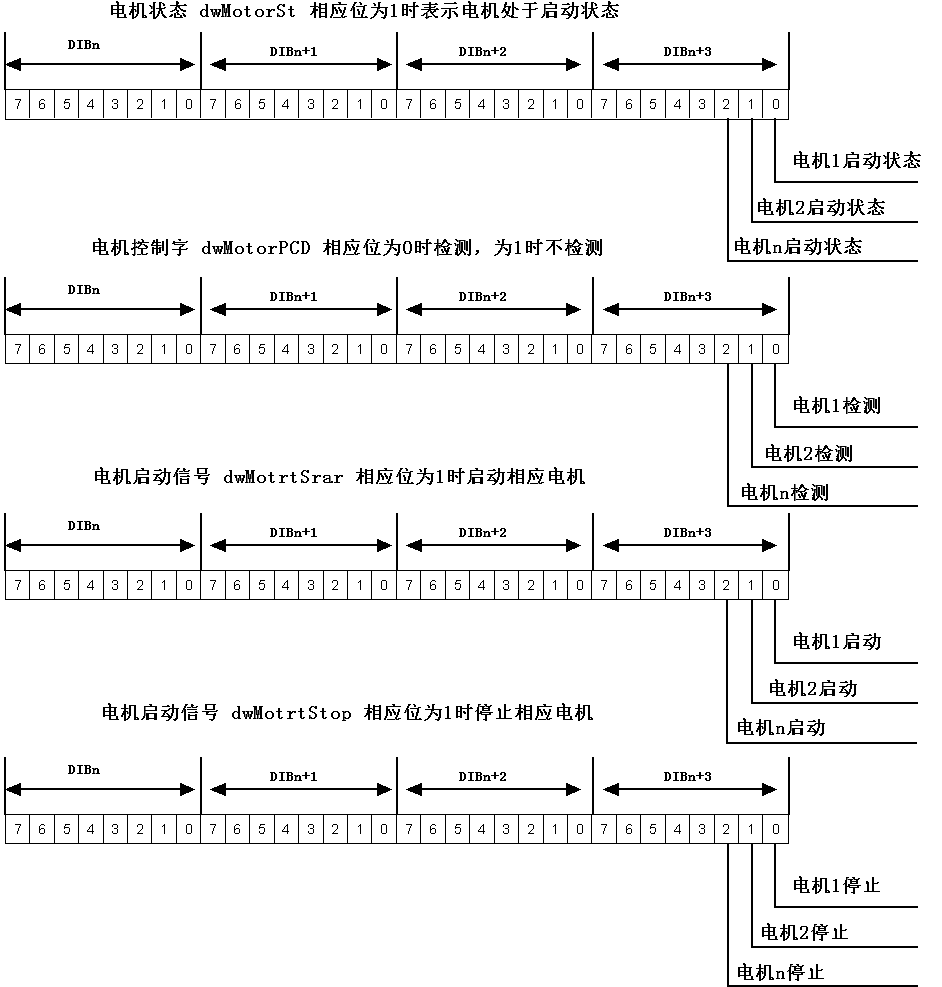
先把相应电机的状态写到电机状态字中,然后把译码出来的相应的启动信号(常开)并联在原来的启动上,把相应的停止信号(常闭)串联在原来的停止上。
输出的都是上升沿信号。
FUNCTION_BLOCK "SC32"
TITLE =
VERSION : 0.1
AUTHOR : 'L.Q.H'
VAR_INPUT
dwMotorSt : DWORD ; //电机启动状态
dwMotorPCD : DWORD ; //电机控制字
bStart : BOOL ; //群起信号
bStop : BOOL ; //群停信号
bRest : BOOL ; //复位信号,未用设为1
END_VAR
VAR_OUTPUT
dwMotrtStar : DWORD ; //相应电机启动信号
dwMotrtStop : DWORD ; //相应电机停止信号
END_VAR
VAR
bStartMark : BOOL ;
bSopMark : BOOL ;
bFP1 : BOOL ;
bFP2 : BOOL ;
bFP3 : BOOL ;
bEnab : BOOL ;
bTime : BOOL ;
iActNo : INT ;
dwActST : DWORD ;
T0N1 : "TON";
END_VAR
VAR_TEMP
bTemp1 : BOOL ;
dwtemp1 : DWORD ;
dwtemp2 : DWORD ;
iNum : INT ;
END_VAR
BEGIN
NETWORK
TITLE =
//初始化
SET ;
SAVE ;
L L#0;
T #dwMotrtStar;
T #dwMotrtStop;
T #dwtemp1;
T #dwtemp2;
LAR1 P##dwtemp1;
L 4; //群起停设备数,最大32个
T #iNum;
//停止标志
A #bStop;
FP #bFP2;
X #bSopMark;
AN #bStart;
A #bRest;
= #bSopMark;
//启动标志
A #bStart;
FP #bFP3;
X #bStartMark;
AN #bStop;
A #bRest;
= #bStartMark;
A #bStartMark;
O #bSopMark;
FP #bFP1;
JCN s001;
//群启及群停时的初始化
CLR ;
= #bEnab;
SET ;
= #bTime;
L 0;
T #iActNo;
//检查的设备
L #dwMotorSt;
L #dwMotorPCD;
OD ;
T #dwActST;
A #bSopMark;
AN #bStartMark;
JCN s001; //当群停时把信号取反
L #dwMotorSt;
INVD ;
T #dwActST;
s001: A #bStartMark;
O #bSopMark;
A #bTime;
JCN s002;
s003: L #dwActST;
SRD 1;
JZ s004;
T #dwActST;
L #iActNo;
+ 1;
T #iActNo; //设备计数
L #iNum;
>I ;
R #bStartMark;
R #bSopMark;
JC s002;
JU s003;
s004: T #dwActST;
SET ;
= #bEnab;
L #iActNo;
+ 1;
T #iActNo; //设备计数
L #iNum;
>I ;
R #bStartMark;
R #bSopMark;
s002: A #bStartMark;
O #bSopMark;
A #bEnab;
AN #bTime;
= #bTemp1;
CALL #T0N1 (
IN := #bTemp1,
PT := T#2S,
Q := #bTime);
L #iActNo;
+ -1;
+AR1 ;
A #bTime;
A #bStartMark;
AN #bSopMark;
JCN s010;
= [AR1,P#0.0];
s010: A #bTime;
AN #bStartMark;
A #bSopMark;
JCN s011;
= [AR1,P#4.0];
s011: A #bTime;
= #bTime;
L #dwtemp1;
CAD ;
T #dwMotrtStar;
L #dwtemp2;
CAD ;
T #dwMotrtStop;
JCN end;
R #bEnab;
end: BEU ;
END_FUNCTION_BLOCK
已启动的设备或屏蔽的设备不会被重复启动或停止。










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐











