quote:以下是引用kdrjl在2013-12-29 20:18:11的发言:关于加速度预控,哈哈,非常感谢有这么一个机会让我讲演一下,过过瘾。
什么是加速度预控呢?它的形式是怎么样的?为什么要加速度预控呢?
第一,在运动学中,一提加速度,自然让我们会想起中学物理课中的惯性公式:F=ma;式中F是力(N),m是物体的质量(kg);a是物体的加速度。这应该是动能公式。当物体没有加速度时,他的动能等于0,但物体有加速度时,就会产生一个动态的力。在传动控制系统中,所谓的加速度预控,就是他的动能预控或者叫动态惯性预控(补偿);
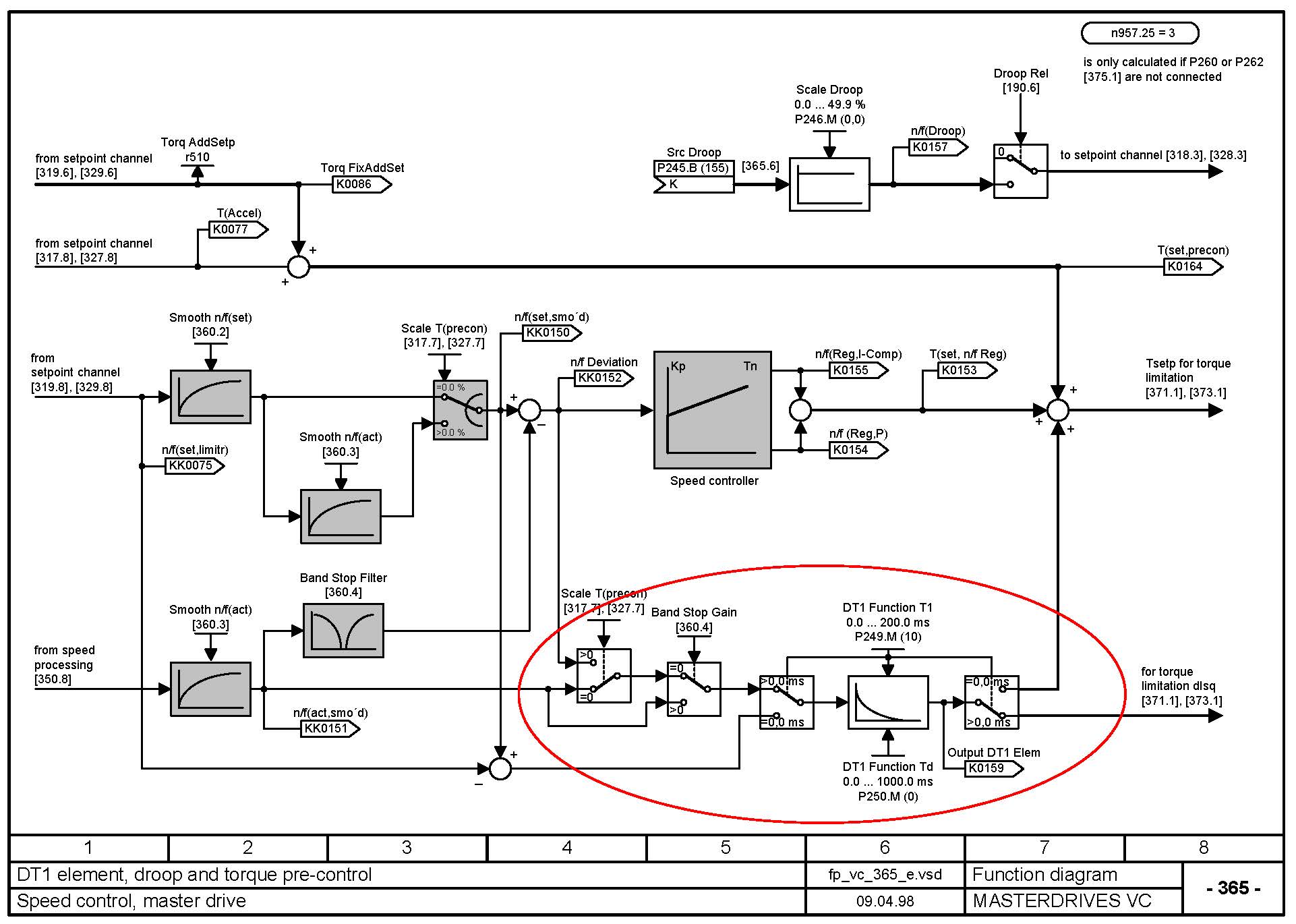
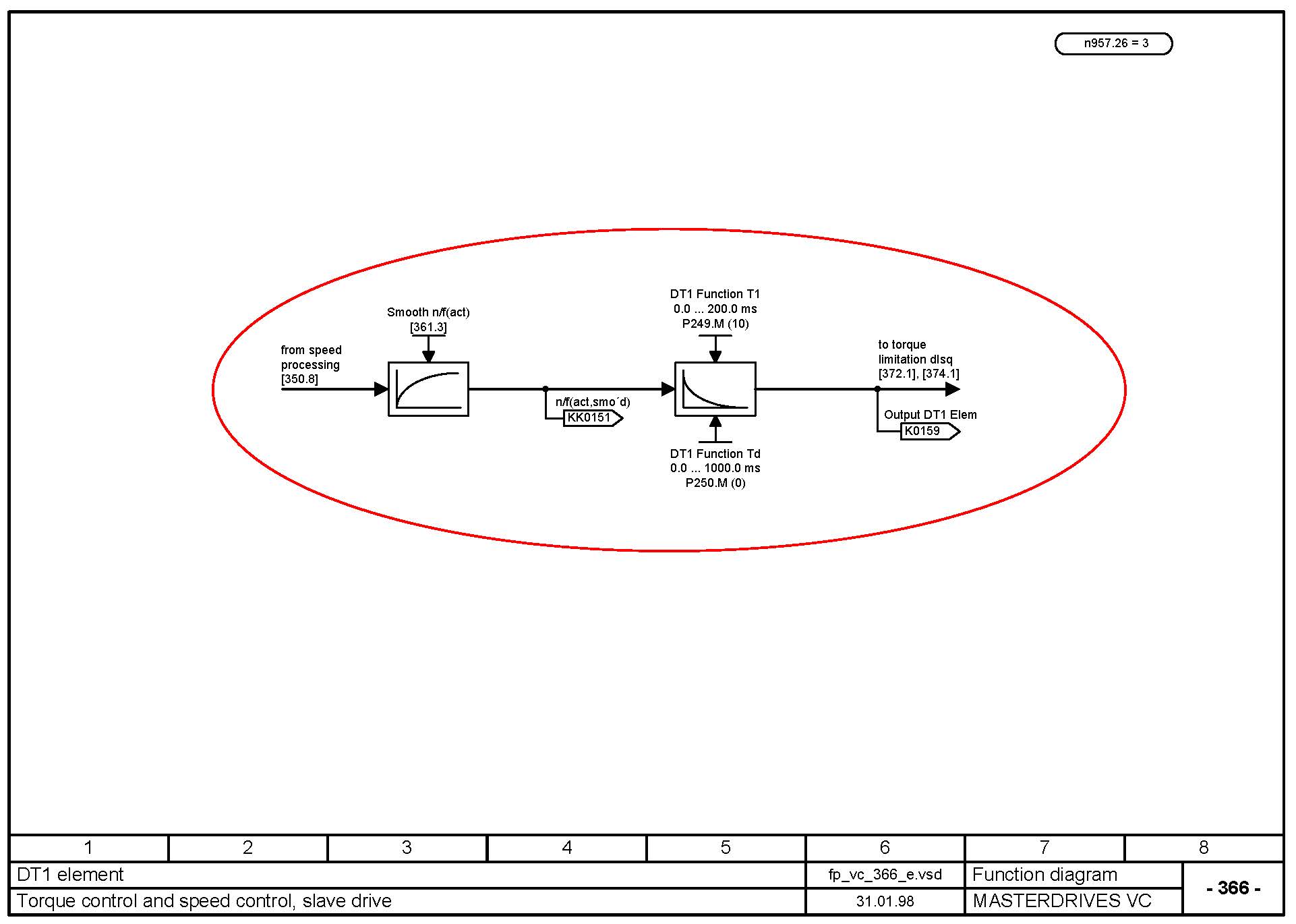
第二,它的形式是怎样的?请看下图示:
形式很简单,就是把实际转速做微分运算,变成加速度然后去做补偿或者附加设定,作用于转矩设定通道。
第三,为什么要做加速度预控呢?道理很简单,就是为了模拟系统的惯性做补偿。举例:一个轧机空载运行于一个稳定转速,在突然咬钢时,会产生转速降落,这是由于负载突变引起的闭环系统动态速降。而如果在轧机的旋转轴上加一个很大的机械飞轮,空载运行时,飞轮也跟着旋转,在稳态时,动能为0,飞轮上聚集着能量。一旦轧机咬钢,飞轮的动能释放,阻碍速降,使轧机保持空载转速不降落。
相同的道理,如果我们采用电惯性模拟的方法,代替机械惯性飞轮。同样可以在轧机咬钢时避免速降产生。条件是,传动控制系统的功率有惯性补偿的功率储备,加速度预控被激活并设置了电惯性模拟参数。
加速度预控,就是利用惯性 阻碍运动物体变化的原理,把一个假想的惯性用电控补偿的形式作用于传动系统中。实现电惯性模拟代替机械飞轮作用,减小系统动态速降。
一次求教,竟引几位高人的如此关注,幸甚,幸甚,带我慢慢消化后给各位回报试验结果,深表感谢!










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐










