展开查看
以下是引用鎏芙在2015-01-13 22:28:24的发言 >4楼:
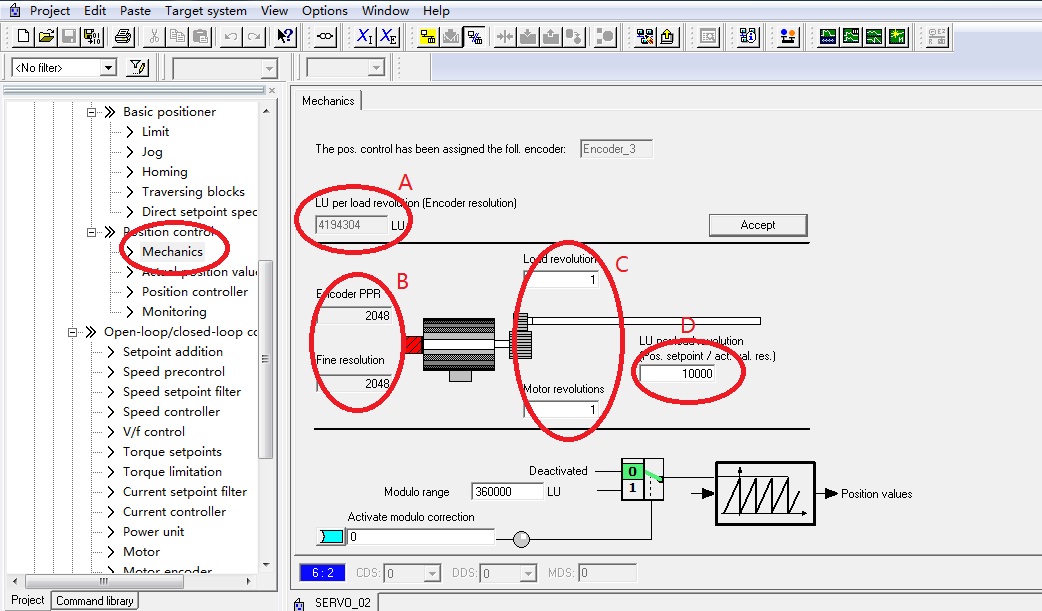
A:负载轴旋转一圈编码器所产生的脉冲数(LU)。
B:伺服电机旋转一圈,编码器产生的脉冲数(LU),脉冲×倍频=2048×2048=4194304。
C:电机轴与负载轴的减速比。例如:1:10,表示负载轴旋转1 圈,伺服电机旋转10 圈。
D:负载轴旋转一圈时设置的单位(LU),比如:您的机械旋转一圈移动10mm,机械单位设置10000。每个单位所表示的精度=10mm÷10000=0.001mm。
速度设定值(1000LU/min)对应转速为:
速度设定值为1000,如果负载轴旋转一圈需要10000LU,减速比为1∶1,那么对应转速为1000×1000LU/min=1000×1000÷10000rpm=100rpm。
你好,我对这里的A和D理解有点困难。
“A:负载轴旋转一圈编码器所产生的脉冲数(LU)”
“D:负载轴旋转一圈时设置的单位(LU)”
为什么STARTER默认这两个值不一样呢?都是负载轴旋转一圈,走过的LU值不应该是一样的吗?
如果我用111报文做基本定位控制,给目标地址的时候,我是应该给负载轴的LU还是给电机轴的LU呢?
还请不吝赐教










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












