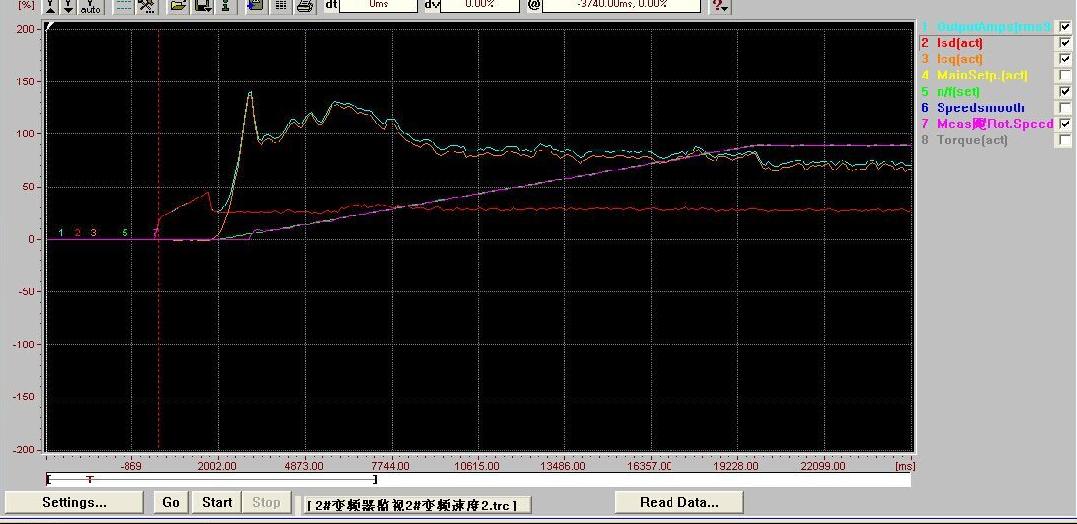
关于带编码器的矢量控制,倒是有现成的例子,曲线如下图,和lxm650你那个类似。
这样的确不错 ,过几天也要试着做一台新的电机(用编码器) ,因为没有经验(甚至一次辨识都没做过) ,这一个星期光看矢量大全了,没抱着一个星期研究透的妄想,可是也知道了些东西,打算在原有参数组的基础上,将电机参数输入,然后P115=1、2、4,再然后就是通过不同的P536设定 做P115=5,在再次基础的参数基础上进行部分手动调整,查了网上一些资料,介绍的都是关于P235、P340这两个参数进行调整。
但是这些只是我自己的猜测,因为现场调试时间有限,领导不会给时间进行思考,对此只能来论坛进行确认,另外考虑之前初期建设单位可以用开环调试成功,非常好奇,在看完无编码器的矢量控制曲线后,又表示非常的不能理解,和带编码器的矢量控制相比,励磁电流相差太大了,而对于P278与P279这两个参数的使用(明白这两个参数只对无编码器控制有效)很难理解 , 如果想用开环控制,又应该如何呢?
这个系统的抱闸控制的确是比较怪异了,但是基本的功能也算都有,我认为这个不是关键,可以将打开抱闸信号变成转矩电流,这个没有问题,但考虑到矢量电流上升的曲线,感觉如果那样会不会励磁电流将居高不下啊。
好了 我说的废话比较多,没做过,没底就话多,嘿嘿
1、我发的图上励磁电流为何会在1.76S的励磁建立时间 出现两次爬坡呢? 并且第二次直接到顶 ,而带编码器的矢量控制中励磁电流可以很低,不明白?
2、我将在开环矢量控制中做控制,是否在做完上述辨识后,在P235 P240 P278 P279进行微调就可以达到预期的结果呢(预期结果是可以尽可能大的提升重物),其他的参数呢,是否想的太简单了些?当然如果溜车也要调整抱闸的控制点,比如把转矩电流从105%调整到120%,只要不过流报警。
3、添加编码器后进行辨识,那么优化的结果肯定好一些,那时候是否也就只针对P235 P240呢?有人告诉我在带编码器做完优化后(P115=5),然后用这组优化参数再退回无编码器的矢量控制,效果会好多,不知道是否是这样?
上面只是我自己想的结果,实际情况并不清楚,希望各位老师能给与一些建议与经验,打扰了



















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐

 精华帖版主置评:发布问题,就本该如此,自己怎么想的,和盘托出。这样的交流才有意义、有看点、有共享。
精华帖版主置评:发布问题,就本该如此,自己怎么想的,和盘托出。这样的交流才有意义、有看点、有共享。











