to:21楼,终于有一个实例的问题了。这是一个直流系统的摩擦与惯性补偿问题。问题提的好。我对此有如下认识,欢迎讨论。
第一,提升机负载,惯性很大,而且有上下限的位置限制,钢丝绳或传动系连体,所以想在直流装置上做P051 = 28 的优化和辨识,似乎是不可能的。估计就是因为此限制,所以这个重要补偿被使用人员屏蔽掉了,改用其他手段解决系统停车定位问题了(比如,延长加减速斜坡时间,抱闸配合控制等)。这是没有办法的事。
第二,讲一下摩擦惯性补偿相关功能图疑问解答(个人理解)
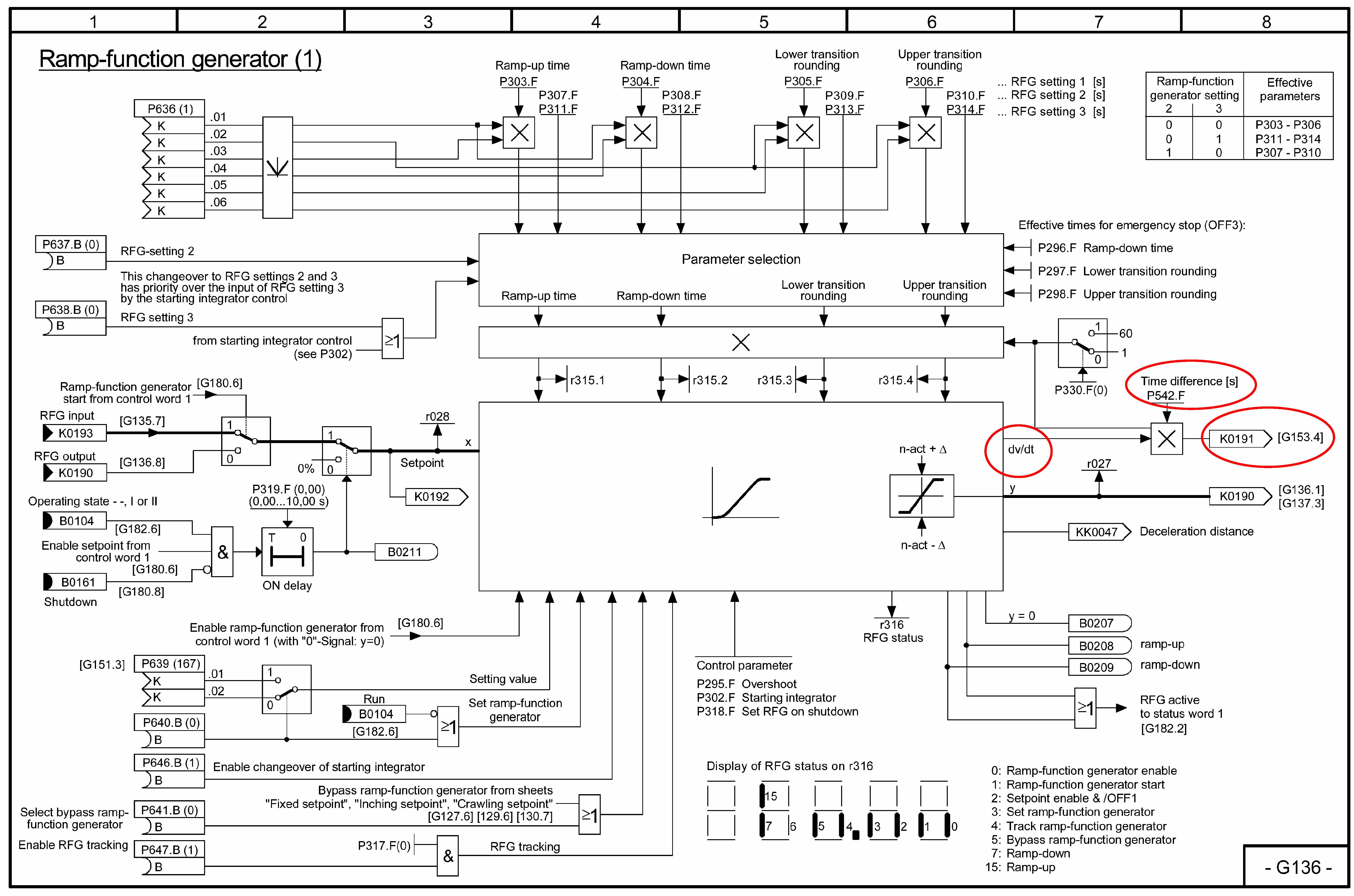
图 1 示是G136斜坡函数发生器,你的疑问是K191是什么?图示很明确,K191等于,在速度变化的时间区间内,加速度(dv/dt)的实际值。这是电机速度变化时惯性力参数;

图 2 示是G153惯性和摩擦补偿,注意红圈部分,P619连接K191(加速度)与K172(系统摩擦阻力)叠加后,由K171输出(这就是惯性(加速度)与摩擦阻力之和);
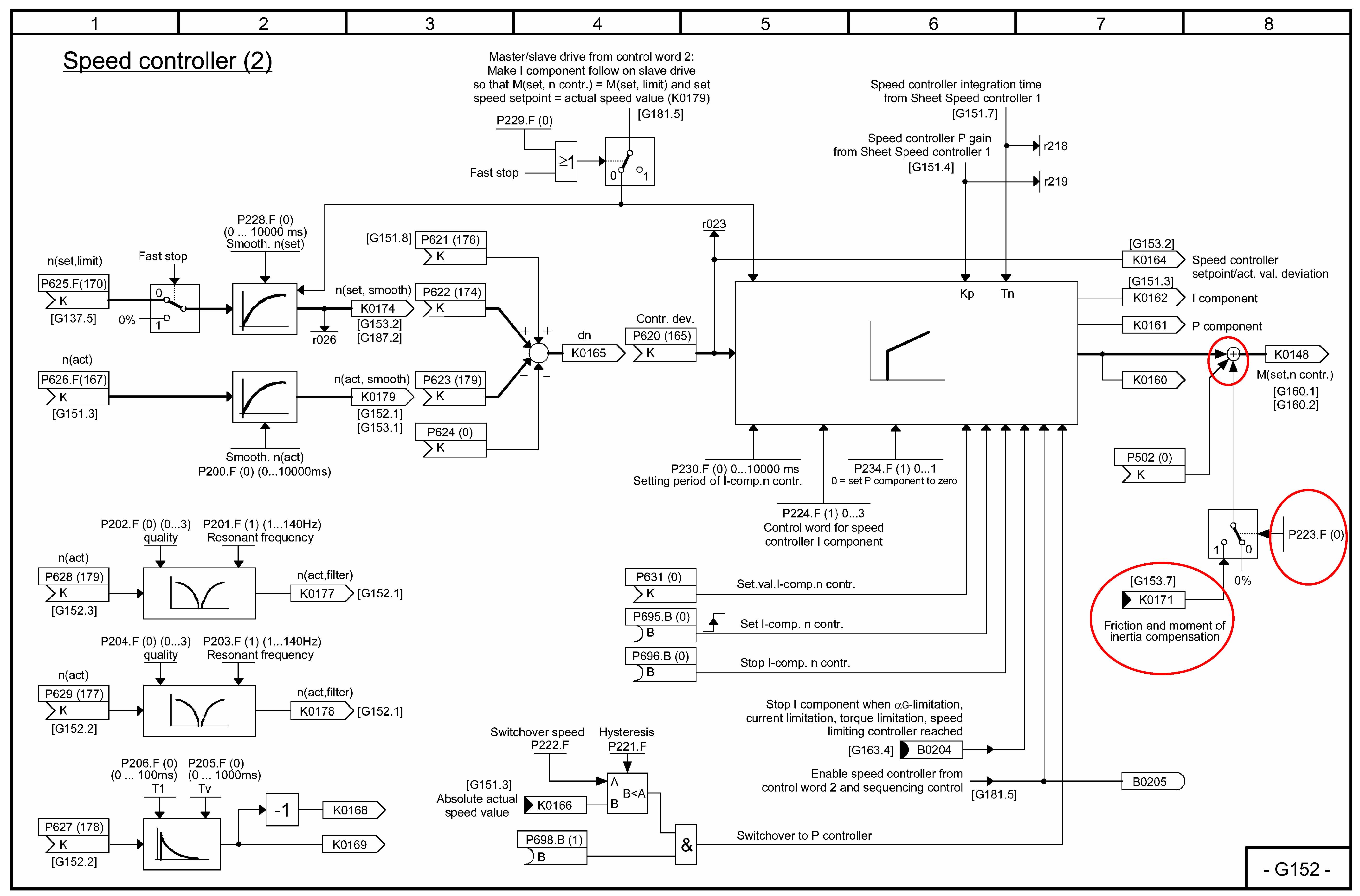
图 3 示是G152速度调节器,看红圈部分,K171作用于模拟开关输入,当参数P223 = 1 时,摩擦和惯性补偿功能就加入到速调的输出节点。这就是传说中的摩擦和惯性补偿功能被激活了。
综上,6RA70的摩擦惯性补偿功能激活要点:第一,要知道系统的启动时间(注意说明书对这个参数的定义),并设置好这个参数;第二,要有一个摩擦曲线;第三,要激活参数P223。
而不论是采用P051 = 28 的自动识别和优化,还是采用手动植入数据,都可以激活这个补偿功能。如果系统摩擦和惯性补偿做得好,斜坡时间就形同虚设了,在动态的速度变化过程到稳态过渡,系统运行都是平滑的,不会超调。斜坡时间设置小了也没事,系统在转矩限幅的约束下平滑加减速。
此功能超爽。















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐

 精华帖版主置评:详细,到位
精华帖版主置评:详细,到位











