














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2015-09-20 18:34:44
4楼
如果转矩限幅控制,工作在发电状态,限幅100%不应该是问题。这个在对拖实验中都能证实的。电动状态限幅在100%,要看系统调节特性了,应该没问题,但如果负载太重,可能会出问题。转速或电流有抖动。除非系统的容量还有储备。
关于转动惯量比,一般是通过空载加阶跃给定来测试,惯性比太大了,系统就会上升很慢,感觉也不舒服。我一般都是在空载最大阶跃给定下,转速实际值刚刚不超调为好。这个其实完全是一个个人的口味问题,就像炒菜放盐,咸淡味自己掌握。无定式。
在满足实际使用需要的前提下,自己看着办。
至于速度调节器的PI参数能受控,那只能说明此时调节器的状态没有进入饱和,一旦进入饱和,PI调节器就不调节了。这是公理。
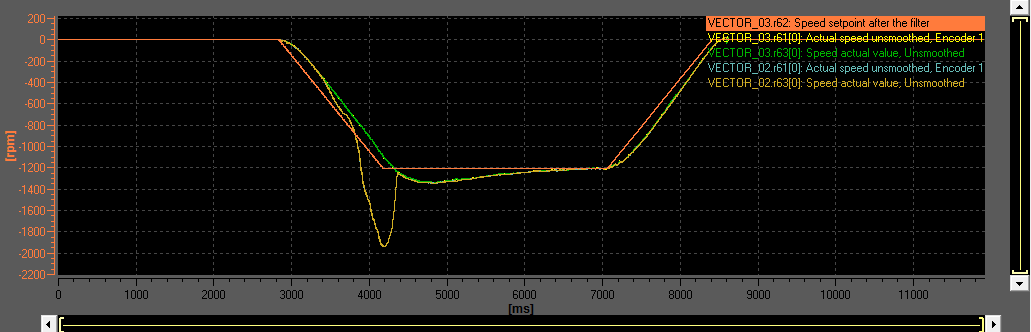
请教一下K版:应用速度环饱和+转矩限幅时(主在后从在前)通过小车车体连接前后两个电机,正转-主从轴曲线与反转-主从轴曲线,如图;为啥反转时从机的速度会有这么大的超调呢(有时会不出现此状态,比较平稳);我个人分析是从机在启动的瞬间打滑了,您怎么看呢?又该如何解决呢?
正转时: 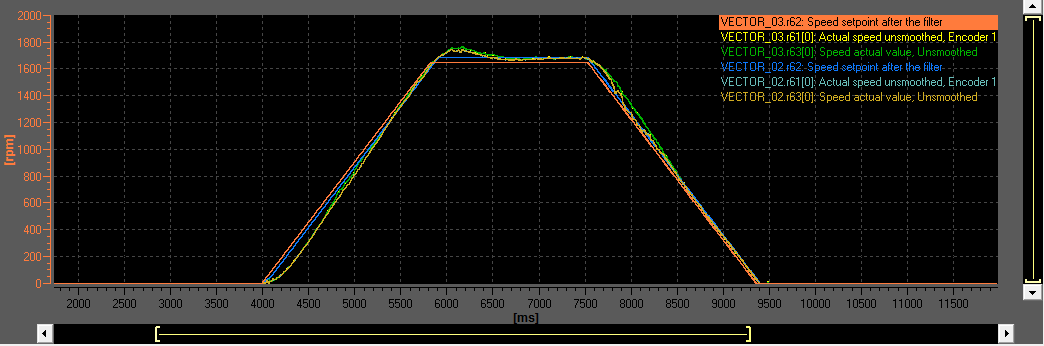
反转时:
请填写推广理由:

分享
只看
楼主










