















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2016-06-02 16:27:43
11楼
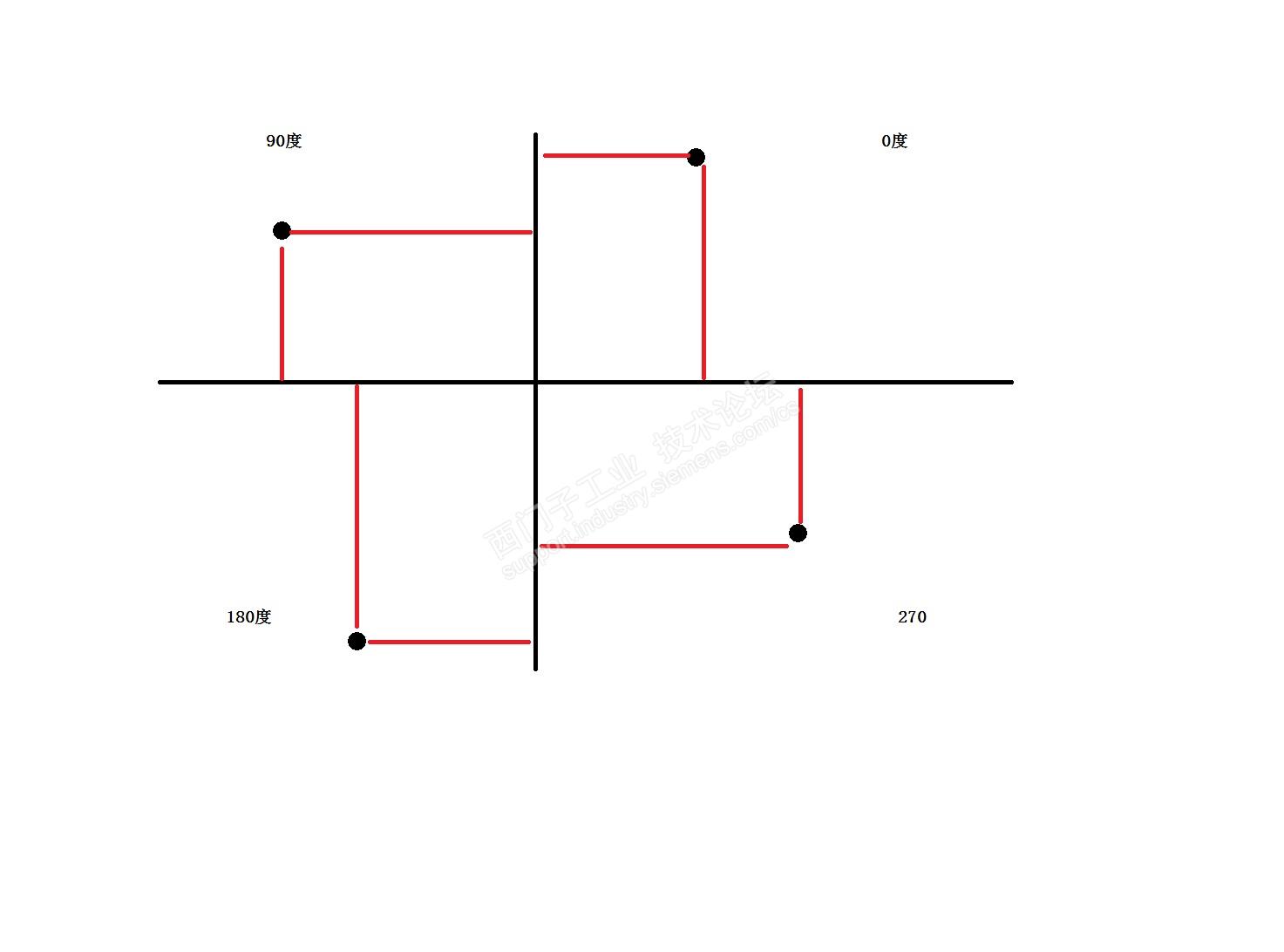
840D的机床,很多是回转台中心是机床零点,所以,不用你以前的那种计算了,直接改变正负号,因为是绕着0.0.0点回转的。如果机床零点不在回转中心上,就要考虑回转中心在机床坐标系中的位置,这样就要有计算了。
你发的那个程序很清楚了说明了实测一个工件坐标系后,怎么得到回转90/180/270度后的坐标系
如果不是增量90度,而是任意角度的话,可以用CROT建工件坐标。
引用4楼详细内容:
就是四个象限转换呗,就是XY对掉,正负号改变这个道理
当然,前提是机床坐标系原点是设在B轴回转中心上
不过好像用840D系统的机器,机械零点都设在了回转中心上,
FANUC系统的机床有些没有设在B轴回转中心,所以转换时还要考虑回转中心坐标
N13 $P_UIFR[1]=CTRANS(X,R101,Y,R102,Z,R103,B,R104):CFINE(X,0,Y,0,Z,0,B,0)
N14 $P_UIFR[5]=CTRANS(X,R105,Y,R106,Z,R107,B,R108):CFINE(X,0,Y,0,Z,0,B,0)
N15 $P_UIFR[9]=CTRANS(X,R109,Y,R110,Z,R111,B,R112):CFINE(X,0,Y,0,Z,0,B,0)
这三句怎解释,?
请填写推广理由:

分享
只看
楼主










