最近在研究一台磨床,上磨盘需要有一定的倾斜角,本文阐述了利用三个位移传感器通过测量位移转换成角度并界面化,分享给大家。
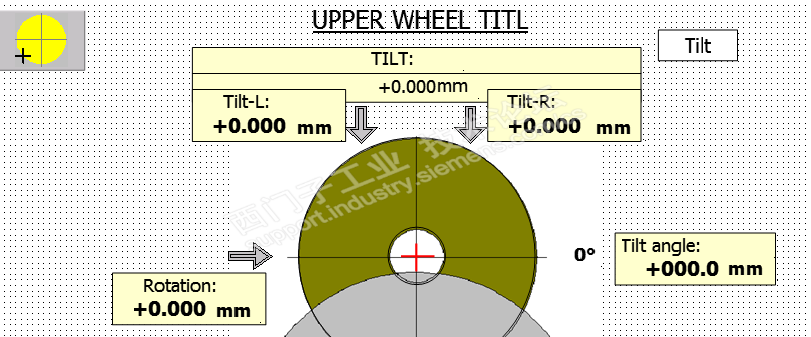
正向两个位移传感器,侧面方向一个位移传感器。主要的思路为:正向两个位移传感器取平均值作为正向位移,与侧向位移传感器组成三角函数关系,通过arctan算出夹角,内部红色光标设置成X/Y偏移变量,如图大圆半径为100,对应X偏移量为sina*100,对应Y偏移量为cosa*100。这样不但可以直观的观察角度,而且更能直观的观察红色光标的位置。附代码如下:
/////////位移传感器数值整定
CALL FC 105
IN :=DB41.DBW232
HI_LIM :=2.000000e+000
LO_LIM :=0.000000e+000
BIPOLAR:=FALSE
RET_VAL:=#_RetVal
OUT :=#_Dist_S_Kipp_P2
CALL FC 105
IN :=DB41.DBW234
HI_LIM :=2.000000e+000
LO_LIM :=0.000000e+000
BIPOLAR:=FALSE
RET_VAL:=#_RetVal
OUT :=#_Dist_S_DKipp_P3
CALL FC 105
IN :=DB41.DBW230
HI_LIM :=2.000000e+000
LO_LIM :=0.000000e+000
BIPOLAR:=FALSE
RET_VAL:=#_RetVal
OUT :=#_Dist_S_Dreh_P1
///////////////////////////////////
////////数值校正
L #_Dist_S_Dreh_P1
L #_Zero_Val_S_Dreh_P1
-R
L DB34.DBD 274
*R
NEGR
T #_Skal_Dist_Sensor_Dreh
L #_Dist_S_Kipp_P2
L #_Zero_Val_S_Kipp_P2
-R
L DB34.DBD 278
*R
NEGR
T #_Skal_Dist_Sensor_Kipp
L #_Dist_S_DKipp_P3
L #_Zero_Val_S_DKipp_P3
-R
L DB34.DBD 278
*R
NEGR
T #_Skal_Dist_Sensor_DKipp
L #_Skal_Dist_Sensor_Kipp
L #_Skal_Dist_Sensor_DKipp
+R
L 2.000000e+000
/R
T #_Skal_Mwert_Kipp_DKipp
//////////////////////////////////////////////////////
////////清零操作
A DB34.DBX 268.0
A DB41.DBX 23.7
JCN N4_1
L #_Dist_S_Dreh_P1
T #_Zero_Val_S_Dreh_P1
L #_Dist_S_Kipp_P2
T #_Zero_Val_S_Kipp_P2
L #_Dist_S_DKipp_P3
T #_Zero_Val_S_DKipp_P3
R DB34.DBX 268.0
N4_1: NOP 0
L #_Skal_Mwert_Kipp_DKipp
L 0.000000e+000
>=R
S #iv_jump1 //positiv
L #_Skal_Mwert_Kipp_DKipp
L 0.000000e+000
<R
R #iv_jump1 //neg.
L #_Skal_Dist_Sensor_Dreh
L 0.000000e+000
>=R
S #iv_jump2 //pos.
L #_Skal_Dist_Sensor_Dreh
L 0.000000e+000
<R
R #iv_jump2 //neg.
L #_Skal_Dist_Sensor_Dreh
L 0.000000e+000
==R
JCN n5e
L 1.000000e-006
T #_Skal_Dist_Sensor_Dreh
n5e: NOP 0
//////////////////////////////////////////////////////
///////四个象限,第一象限0-90°
A #iv_jump1
A #iv_jump2
JCN e51
L #_Skal_Mwert_Kipp_DKipp
L #_Skal_Dist_Sensor_Dreh
/R
ATAN
T #_Temp_Winkel_Verh_Y_X //pos Winkel (rad)
L 3.140000e+000
/R
L 1.800000e+002
*R
T #_vi_Winkel_A
L #_Temp_Winkel_Verh_Y_X
COS
L 1.000000e+002 //HMI画的半径
*R
RND
T #_vi_EngsteStelle_X
L #_Temp_Winkel_Verh_Y_X
SIN
L 1.000000e+002
*R
RND
T #_vi_EngsteStelle_Y
e51: NOP 0
////////////////////////////////////////////////
////////其他三个象限同理。










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国



 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












