我们有一台德国840DSL的机床,其中E轴(第四轴)是转盘,旋转轴,伺服电机本身带有绝对编码器,垂直安装,电机下面连接着1:7的减速箱,减速箱后面是涡轮,然后带着一个水平的蜗杆传动到转盘,涡轮与蜗杆的减速比为 5:552。 在水平的蜗杆(连接转盘的另外一端)的末端也连接着一个绝对的旋转编码器。这个编码器被当做直接测量系统激活,是DB34.DBX1.6有效。
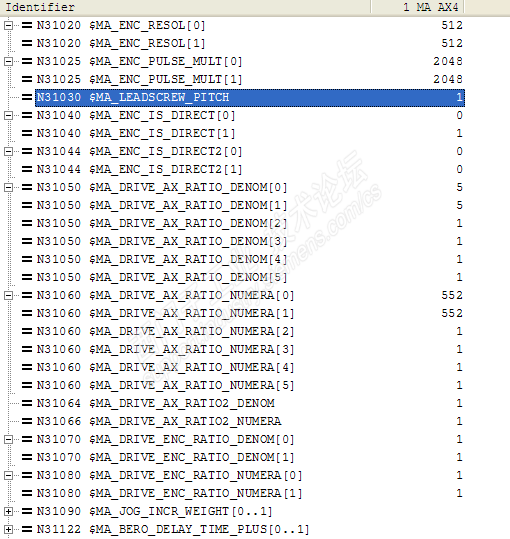
齿轮比的设置如图所示:31050【0】和31050【1】=5,其余的等于1,31060【0】和31060【1】=552,其余的等于1。
1、这里我就感觉奇怪,参数组【0】应该对应电机编码器,怎么会合对应外置编码器【1】的参数组齿轮比是一样的?如果这么设置,两个编码器反馈的数值怎么会一样呢?
2、一次外置编码器损坏,屏蔽了外置编码器,修改DB34.DBX1.5=1,没有修改齿轮比,发现转盘转360度不能回到初始位置。然后用1:7的减速比乘以5:552的减速比,最终设定31050[0]=5,31060[0]=552*7=3864,这时转360度才能起点和终点重合,说明电机编码器的减速比就是5:3864。但为何厂家初始的设置是5:552?
3、这台机床带有安全集成功能,2个测量系统之间的位置值要进行比较,如果位置值超差超过参数MD36942 $MA_SAFE_POS_TOL 中的设置值,这个值E轴设置的是0.5度。系统就会报警27001 轴E交叉校对错误,代码3,NCK值 X ,伺服 X。从这第3点可以看出,尽管是外部测量系统2有效时,电机的测量系统1也应该要反馈回正确的数值,也需要齿轮比正确设置。
4、还有一点,以前报警27001,2个测量系统差值超过0.5的时候,发现只要重启启动系统,2个系统的机械坐标值就会变成一样(忘记看了,外置的和电机的数值哪个是不变的?),为何会这样呢? 这2个系统都是绝对编码器,30240【0】和30240【1】都等于4。回参考点的模式34200【0】和34200【1】也都等于0。就算重新上电,由于2个都是绝对的,也都不应该变化,为何变成一样了呢?
















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












