














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2017-09-29 19:53:19
11楼
K侠一问,曾经是学渣的我很紧张啊,
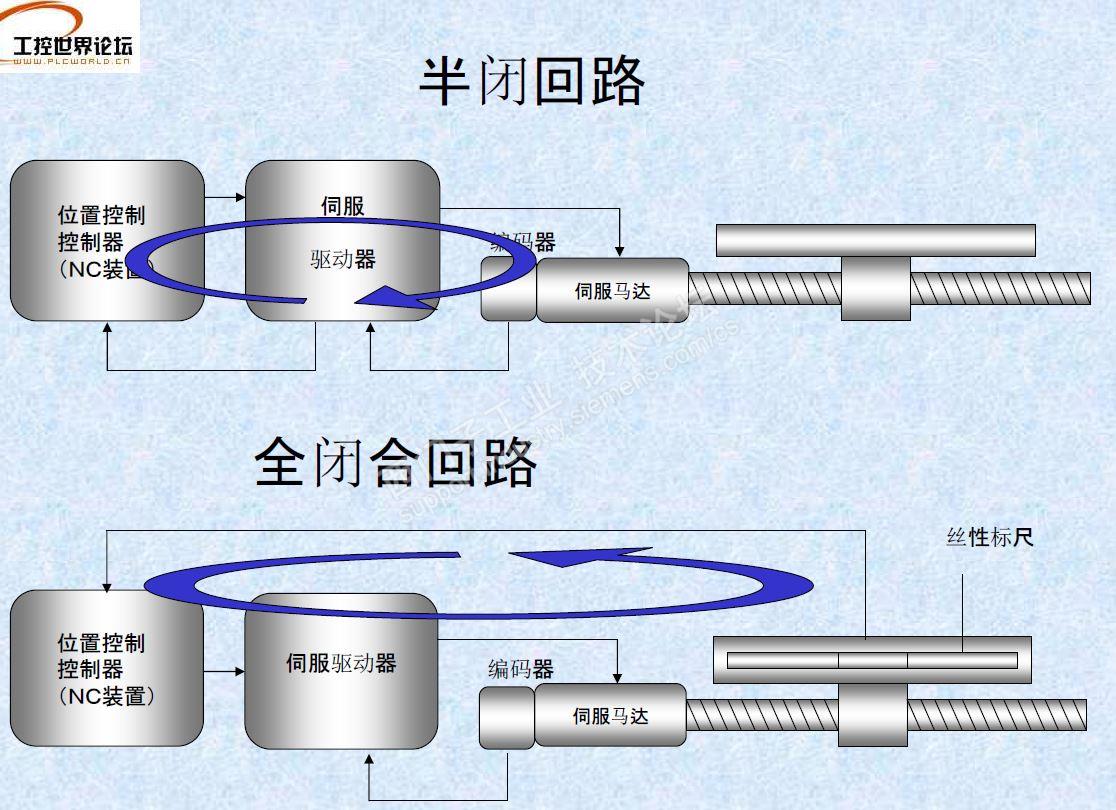
找了一张图
半闭环的反馈在丝杠上,无法彻底消除间隙
全闭环的反馈是磁尺/光栅尺,在工作台上
这里所谓的环是对整个系统来说的,而不是对伺服或者直流驱动器
所以上面几位可能有误解
哦,基本明白半闭环的表述含义了。但我不认同这么描述,第一个方案是用编码器作为位置环的实际值信号。编码器既可以作为速度检测,也可以作为位置检测。这个毋庸置疑。只要是最外环反馈值来自于实际值,中间传输和转换那是反馈系数和时隙问题。还是全闭环呀。
其实给出的两个图示,无非就是一个由位置传感器直接给PLC位置环反馈,另外一个是通过伺服驱动传给PLC的位置反馈。在本质上有区别吗?我认为没有。
有区别的是,所谓全闭环的位置反馈直接作用在PLC的端子输入,而所谓半闭环的位置信号是先到驱动装置,再由驱动装置传输的PLC,也许在时间上两者会有差别。仅此而已。
另外特别感谢你的关于半闭环的回复。论坛嘛,就是相互交流的平台,各抒己见,没有什么不好意思的呦。大家都是平等的,相互发表自己的见解,相互交流技术观点。这挺好的。
我的观点就是,闭环就是闭环,开环就是开环,哪来的半开半闭的自动化控制呢?反正我理解不了这么定义闭环自动化控制。
另外,说开环,过去的开环概念,就是不能自动调节,设定多少,实际值就是常数量,无法修正。,所以,闭环控制可以想给多少自动调节实际值就是多少。这叫古典控制理论。但现在的开环控制,是属于现代控制理论范畴了。它是通过数据模型算出来的,设定值一定是实际值,它的快速性比古典的闭环控制可直接多了。但是现代控制理论的准确性,是靠大数据的计算为依托。它是实际受控对象的精准数学模型,否则,这种直接的开环控制会有很大的误差。
直接开环控制最好的例子就是汽车电喷ECU控制。它是根据此发动机的特性,控制发动机燃油喷嘴,不同车速,不同路况喷油量不同。开环给定,比闭环调节更快,更经济省油。
请填写推广理由:

分享
只看
楼主










