


















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2017-10-03 21:03:03
88楼
最近总是接触G120或S120的调试。所以有关控制方面的话题满脑子都是。今天聊一聊S120的DCC块PIC(PI调节器)。先只限于纸上谈兵吧。
DCC里的PIC块功能图和真值表如下:
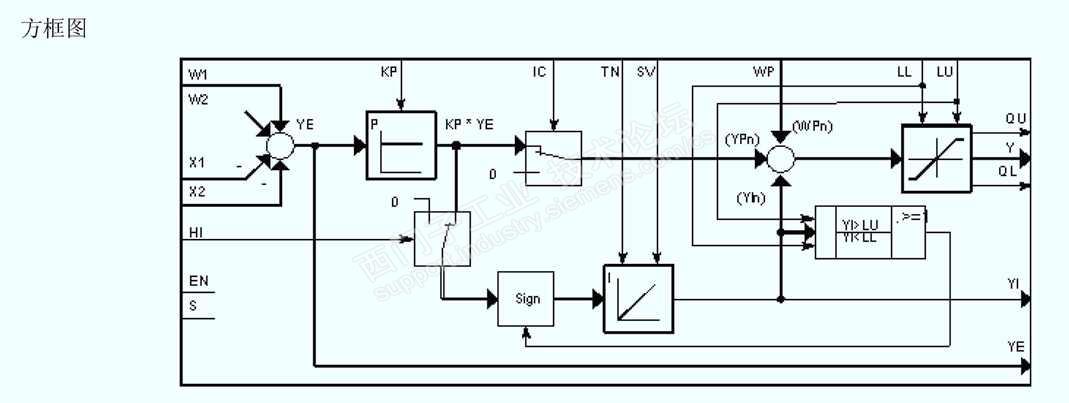

过去,一说PID算法,哇塞,神秘了,特深奥的那种。什么调节器的设计方法和计算,什么对称法,什么最佳计算0.5,云云...。现在,看过DCC的PIC块所给出的功能图和真值表。那些算法,全都黯然逊色了。
由这个块可以实现先开环后闭环的控制方法,通吃一切闭环调节对象。没压力。根本不用算。嘻嘻。话说的有点绝了,但实际似乎就是这的吧?
先开环后闭环的控制基本工作原理是:当PI调节器输入设定值和实际值做比较,如果其差值的绝对值大于100%设定值的10%,让调节器的输出等于当前设定值;等待实际值的上升,使输入比较的差值绝对值小于100%设定值的10%,一旦条件成立,PI调节器的输出接入PI运算结果。
也就是说,以100%设定值的10%作为标准,当设定值与实际值之差大于此阈值,开环给定设定值,当设定值与实际值小于此阈值,启动PI调节器运算消除静差。
具体的做法,需要有一个比较器做辅助支持,然后利用PIC块的端口设置即可实现。真值表给出了各个端口的基本功能。
 精华帖版主置评:干货,,长知识了-北
精华帖版主置评:干货,,长知识了-北
请填写推广理由:

分享
只看
楼主










