
应用:组合机床主轴动力头的运动控制,动力头由液压驱动。
电磁阀YT1得电,前进;失电,后退。
电磁阀YT2控制前进及后退的速度,得电快速,失电慢速。
工作过程:
1、从原位(行程开关1XK ON)开始工作,按下起动按钮,先快速前进;
2、到行程开关2XK ON,转为工进(慢速前进);
3、加工一定深度,3XK ON,快退;
4、退到2XK OFF(目的为了排屑),又快进;
5、快进到3XK ON,又转工进;
6、加工完毕,4XK ON,快退,直到原位1XK ON停。
I/O分配如下:
输入1XK、2XK、3XK、4XK分别为I0.0、I0.1、I0.2、I0.3;
输出YT1、YT2分别为Q0.1、Q0.2。
顺序控制有多种方法,这里提供一种以数值为处理对象,结合表驱动的理念,进行程序设计。
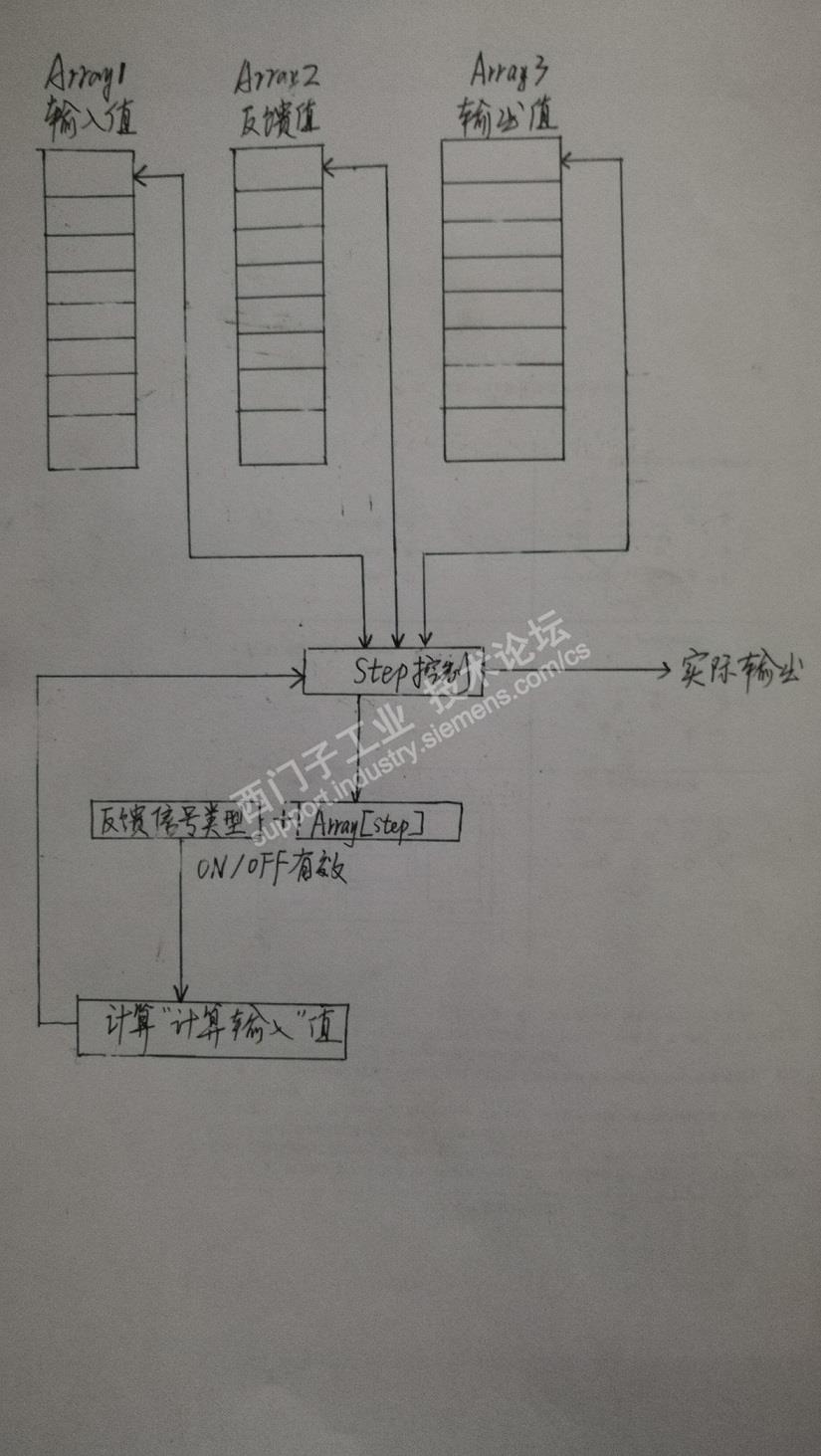
步进控制系统中,输入通道的值,反馈信号的类型值(上升沿有效还是下降沿有效?),输出通道的值,
分别构建各自对应的三个数组,形成“表”,然后根据现行的“步”号建立索引下标,对上述的表进行寻址操作,将输出通道值表中的值输出到实际输出,根据读取的“反馈信号类型值”,结合表中的“输入通道值”进行计算,并根据计算结果,控制“步”的触发。
控制流程简图如下:
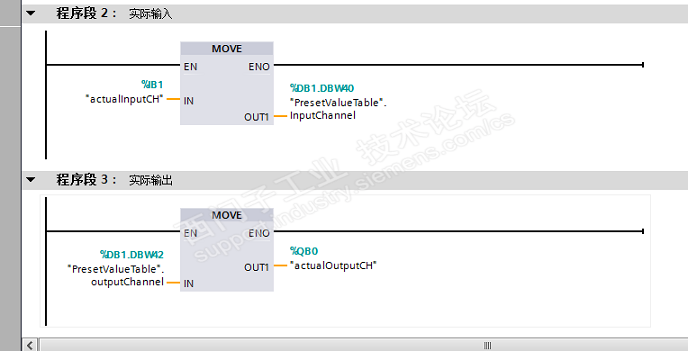
控制主程序如下:




















 西门子商城
西门子商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












