这几天在调试SIMOTION。
D425-2PN/DP.
因为是轮式驱动机构,为了实现精确定位,增加SMC30模块,加装了SSI接口的条码定位传感器。
条码定位自身信号输出精确度是0.1mm。但是,设备实际静止的时候,有时候条码数据是有波动的。
比如可能有1--2mm的数据跳动。
目前的现象是,如果刚通电,给了使能信号,这时候一般是没有颤动的,进行一次的运行定位之后,停下来,设备颤动就比较厉害,监控速度值最多能达到50mm/s左右。能看到设备明显再颤动。
但是也偶尔有时候停下来,颤动情况要轻很多。这可能是什么原因导致的呢?
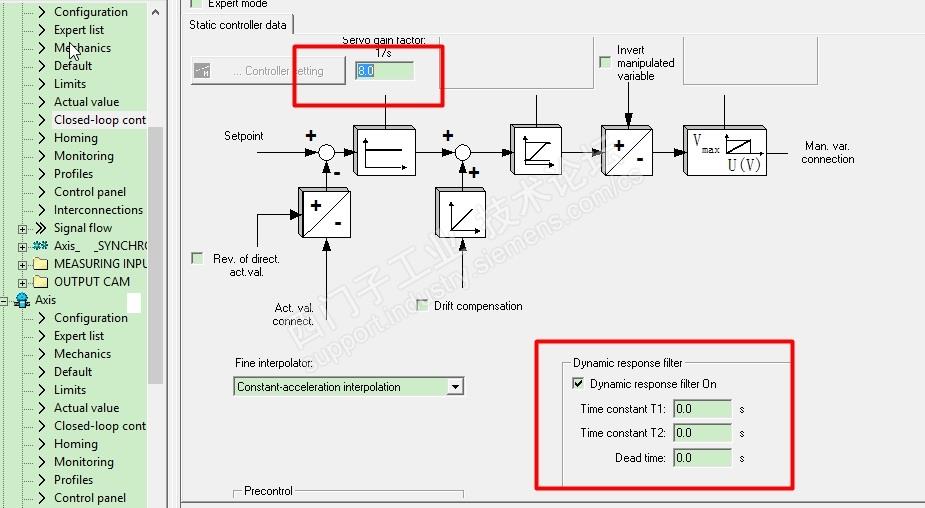
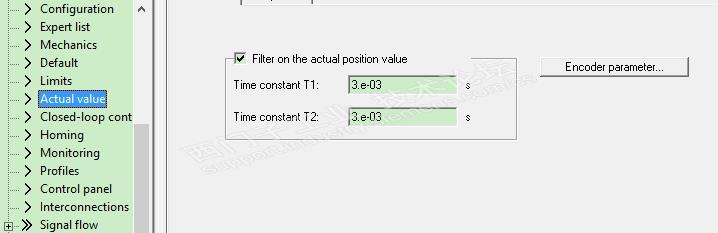
尝试修改几个参数,编码器滤波时间增加,比如30ms基本,比较有效果,但是影响了运行过程中的动态响应。
另外2个参数,包括dead_time,效果不是很明显。
有没有什么办法能让设备在静止的时候对编码器数据波动不要这么敏感,而又不影响动态性能呢?















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐













