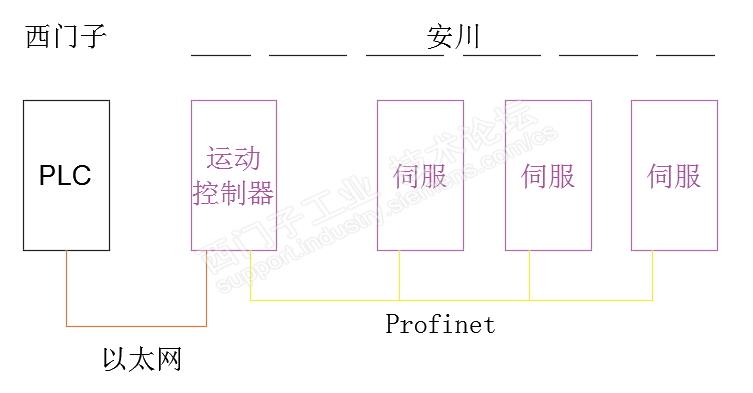
我公司的产品拓扑结构如下:
一,西门子和安川运动控制器之间用以太网,即一般的网线;
二,安川的运动控制器和伺服之间用profinet
我百度了许多资料,也在本站查过许多资料,均不得要领。
我现在的核心问题可以这么说:如果我想命令刀头从零点运动到(1000,200,50)位置,那么:
一,怎么把HMI中三只电机的目的位置和速度告诉PLC? 用什么通信和什么指令
二,怎么把PLC中三只电机的目的位置和速度告诉运动控制器?用什么通信和什么指令
学了许多课程,说的都是西门子自家PLC控制自家伺服的,没有控制别家伺服的,所以学不会。



















 西门子商城
西门子商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












