各路大神们好,小白最近想研究一下自动寻轨agv小车,试写了一个自动轨迹校正的小程序,希望大神们批评指点,另有更好的想法的大神们可以一起分享,共同进步!
硬件上采用了两个XGS-19006磁导航传感器(至今我也没弄明白为什么要两个)前后各一个,如图
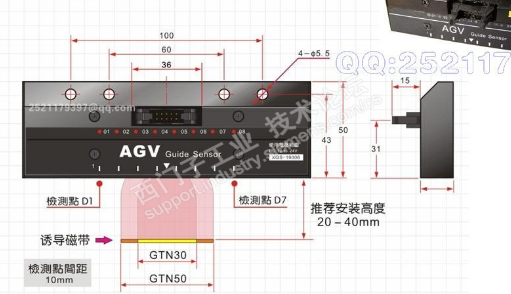
此传感器采用8位npn数字开关量输出,均匀分布,点距10mm,检测范围0-55mm,诱导词条采用30mm宽
下面是我的一小段SCL程序理论上是否可以通过改变小车两个电机的速度差来完成轨迹校正?
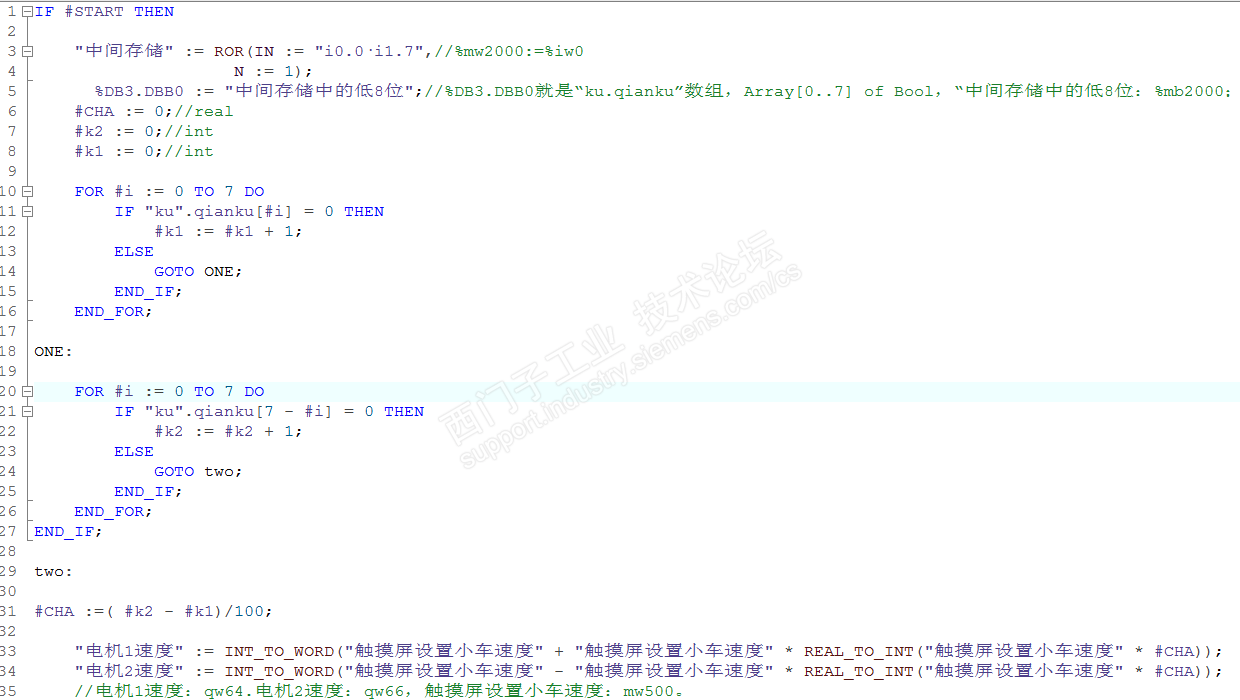
这里的八个传感器接在plc的i0.1~i1.0上所以需要循环右移一位再进行处理!
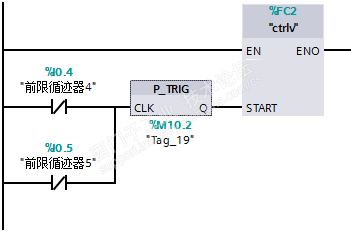
检测到前地标传感器的中间两个传感器有一个不通时调用一次该fc块!
大家有什么想法都说说吧!



















 西门子商城
西门子商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












