














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2018-04-24 22:32:35
20楼
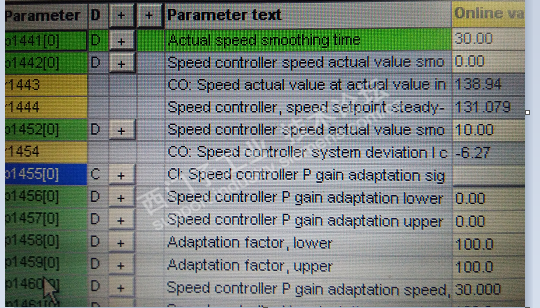
P1441原值是30ms,现在我根据你的建议改到40ms了,此故障出现次数不多,到时我查一下故障记录,跟踪一下情况吧!有空我记录一下波形。
ok,其实针对你所出示的波形,给个30-40ms的滤波就足够了,如果滤波前与滤波后录制的波形没有明显变化,那说明这个毛刺的产生是共模的噪声,靠滤波没戏。还是想想其他的办法,比如说,编码器与电机之间加软轴,比如说,换编码器等等,试试效果如何。反正导轨是改不了的,只能是通过其他的手段,把电机的运行尽可能的平滑运行。
另外,发现,你出示的波形,转速的波动很小2rpm左右,但振频挺高的,1s内n次,所以,我想知道你的系统速度调节器的PI参数是多少?能晒晒吗?
我的看法,像天车这种行走的控制,速度调节器的时间常数应该比较大,惯性作用。所以,放大倍数不能太高了3-5倍以内足矣,积分时间可以大一些。另外加入惯性补偿的前馈控制,会使行走速度平滑。
还有,天车的行走,速调没做优化吧?因为是行走,做不了动态优化?所以,速调的参数都是经验参数?
仅供参考。
请填写推广理由:

分享
只看
楼主










