














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-01-19 12:17:47
6楼
感谢斑竹关注
是的,通常是需要飞轮。但是项目在设计初期的想法就是用电惯量来补偿这个机械惯量。大概的思路是通过换挡时的角加速度,计算出补偿转矩,然后附加在转矩通道值上。
查看了S120速度控制器的功能图,没看到微分环节的参数咯
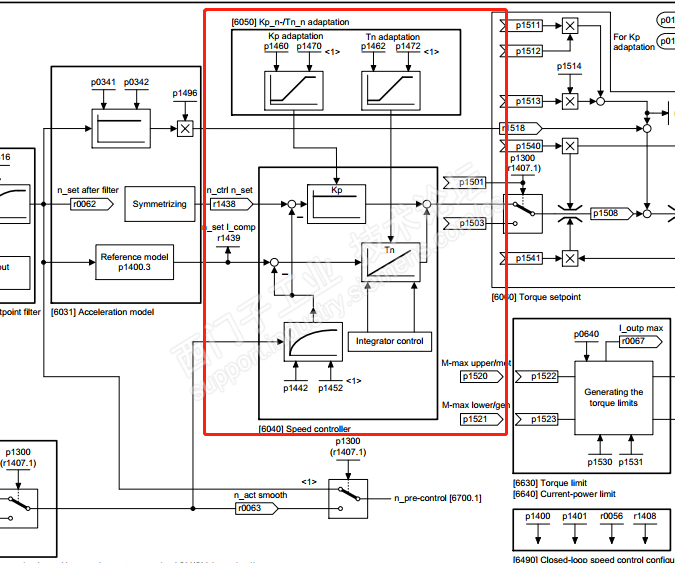
这个哪行呀。
这个是用于不同转速时的调整增益用的。
一般的PID是固定的增益,这个是可以按速度 - 改变增益用的。
请填写推广理由:

分享
只看
楼主










